电机驱动之PWM互补输出死区时间设定
一、互补PWM输出
下图1:Q1和Q2两MOS管组成了一个桥臂,两个管子不能同时导通。那么,如果两个管子都用PWM波控制的话,则两个PWM波形极性相反,图1中红色圈内的波形,高低电平相反,我们把这种波形称为互补PWM波形。
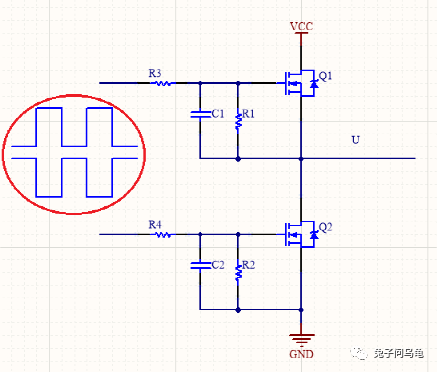
图1
二、添加死区原因
上图1红圈里的互补PWM输出会造成问题的,首先,半导体器件内部都有结电容的,列如MOS管,MOS管导通,需要对MOS管的GS电容进行充电,只用GS电压大于阈值电压,MOS管才能导通;反之,MOS管关闭,GS电容放电,当GS电压小于阈值电压时,MOS管才能关闭。所以,在控制波形沿跳变时刻,一个MOS管GS电容在充电,一个MOS管GS电容在放电,这样会存在两个管子同时导通的情况,一个管子还没关断,另一个管子就开通了,从而造成VCC和GND短路。
解决上述问题,只需确保一个管子导通前,另一个管子已经是关闭了。下图2,控制波形沿跳变时刻,只需让高电平的提前一段时间为低,低电平的延迟一段为高,就可以避免两个管子同时导通情况,我们称同时为低电平的时间为死区时间。

图2
三、死区时间设定
在确保两个管子不发生同时导通的情况下,死区时间越短越好。死区时间越长,最大占空比越小,输出最大功率越小。具体的死区时间需要实际测试的,刚开始可以设置一个初始值,比如4us左右,然后结合示波器调试最终的死区时间。下图3是示波器上下桥GS波形(载波频率20kHz,死区时间2us)。

图3
死区时间的设定和载波频率有关,这里载波频率建议15K-20KHz。因为不同的载波频率,相同的死区时间,影响最大占空比。假如死区时间2us。载波频率20KHz时,周期时50us,那最大占空比是48/50=96%;载波频率是100kHz时,周期是10us,那最大占空比是8/10=80%,最大占空比只有80%是不是不能接受了。所以死区时间1-2us,是需要载波频率在15k-20kHz。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。