1. 项目简介
这是基于STM32设计的一个指针式电子钟+万年历小项目,采用3.5寸的LCD屏显示时钟,日历、温度、天气,支持触摸屏调整设置时间,设置闹钟,查看日历等等。整体项目主要是技术点就是LCD屏的图形绘制。比如: 时钟的时针绘制、分针、秒针、表盘、日历绘制等等。
时钟的时间是直接采用STM32本身的RTC时钟,室内的室温数据采用DS18B20温度传感器获取,STM32芯片的具体型号是STM32F103ZET6,只要是STM32F1系列的开发板,代码都是可以通用的。
LCD显示屏采用的正点原子的3.5寸TFT显示屏,支持8080时序,自带触摸屏功能,触摸屏是电阻屏,驱动芯片是XPT2046,SPI接口,通信非常方便。
STM32F103ZET6带有FSMC功能,可以输出8080时序,本项目里驱动LCD屏就采用FSMC控制的,效率比较高。
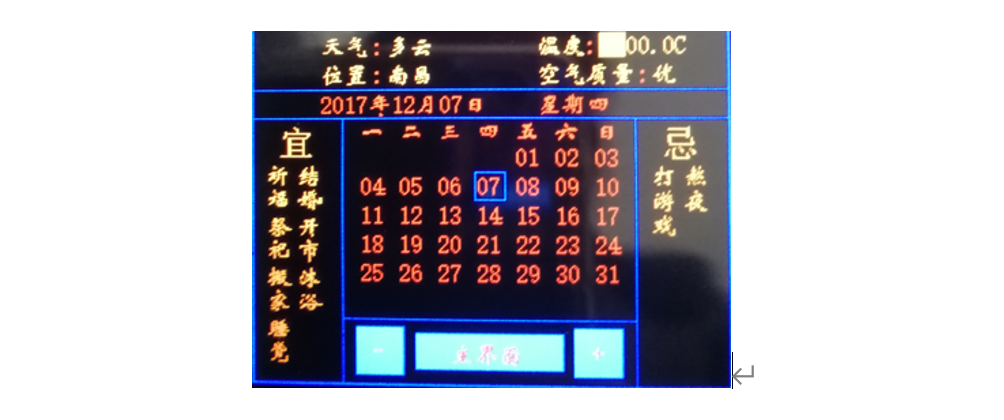
主界面如下:


2. 项目功能介绍
下面对每个子功能页面做详细讲解。
2.1 实时时钟页面
在LCD屏上方显示表盘、分针、时针、 秒针、刻度、更改时钟时间方块,并实现分针、时针、秒针的移动,在实时时钟下方同步显示数字时钟。

运用触摸屏功能实现时钟设置功能,点击“+” “-”至设置时钟方块,跳出设置时钟界面,即可开始设置时钟与日期;点击“+”“-”至设置闹钟方块,跳出设置闹钟界面,即可开始设置闹钟。

2.2 日历页面
在LCD屏中部显示日期、星期、天气、实时温度,在LCD屏下方显示日历、左右两边显示黄历,并在日历上重点突出今天的日期。
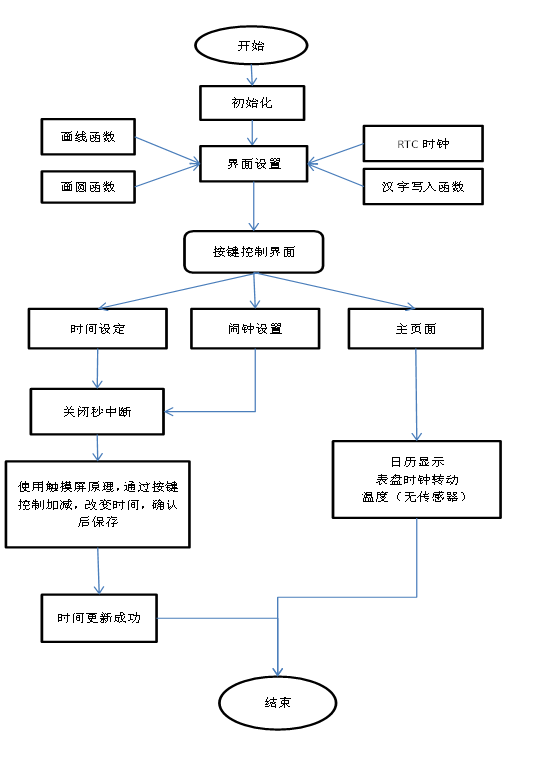
3. 项目实现主要程序讲解
3.1 流程图
3.2 ds18b2.c 代码
下面列出DS18B20温度传感器主要代码.
复制
#include "ds18b20.h"
#include "delay.h"
//复位DS18B20
void DS18B20_Rst(void)
{
DS18B20_IO_OUT(); //SET PG11 OUTPUT
DS18B20_DQ_OUT=0; //拉低DQ
DelayUs(750); //拉低750us
DS18B20_DQ_OUT=1; //DQ=1
DelayUs(15); //15US
}
//等待DS18B20的回应
//返回1:未检测到DS18B20的存在
//返回0:存在
u8 DS18B20_Check(void)
{
u8 retry=0;
DS18B20_IO_IN(); //SET PG11 INPUT
while (DS18B20_DQ_IN&&retry<200)
{
retry++;
DelayUs(1);
};
if(retry>=200)return 1;
else retry=0;
while (!DS18B20_DQ_IN&&retry<240)
{
retry++;
DelayUs(1);
};
if(retry>=240)return 1;
return 0;
}
//从DS18B20读取一个位
//返回值:1/0
u8 DS18B20_Read_Bit(void)
{
u8 data;
DS18B20_IO_OUT(); //SET PG11 OUTPUT
DS18B20_DQ_OUT=0;
DelayUs(2);
DS18B20_DQ_OUT=1;
DS18B20_IO_IN(); //SET PG11 INPUT
DelayUs(12);
if(DS18B20_DQ_IN)data=1;
else data=0;
DelayUs(50);
return data;
}
//从DS18B20读取一个字节
//返回值:读到的数据
u8 DS18B20_Read_Byte(void)
{
u8 i,j,dat;
dat=0;
for (i=1;i<=8;i++)
{
j=DS18B20_Read_Bit();
dat=(j<<7)|(dat>>1);
}
return dat;
}
//写一个字节到DS18B20
//dat:要写入的字节
void DS18B20_Write_Byte(u8 dat)
{
u8 j;
u8 testb;
DS18B20_IO_OUT(); //SET PG11 OUTPUT;
for (j=1;j<=8;j++)
{
testb=dat&0x01;
dat=dat>>1;
if (testb)
{
DS18B20_DQ_OUT=0; // Write 1
DelayUs(2);
DS18B20_DQ_OUT=1;
DelayUs(60);
}
else
{
DS18B20_DQ_OUT=0; // Write 0
DelayUs(60);
DS18B20_DQ_OUT=1;
DelayUs(2);
}
}
}
//开始温度转换
void DS18B20_Start(void)
{
DS18B20_Rst();
DS18B20_Check();
DS18B20_Write_Byte(0xcc); // skip rom
DS18B20_Write_Byte(0x44); // convert
}
//初始化DS18B20的IO口 DQ 同时检测DS的存在
//返回1:不存在
//返回0:存在
u8 DS18B20_Init(void)
{
RCC->APB2ENR|=1<<8; //使能PORTG口时钟
GPIOG->CRH&=0XFFFF0FFF; //PORTG.11 推挽输出
GPIOG->CRH|=0X00003000;
GPIOG->ODR|=1<<11; //输出1
DS18B20_Rst();
return DS18B20_Check();
}
//从ds18b20得到温度值
//精度:0.1C
//返回值:温度值 (-550~1250)
short DS18B20_Get_Temp(void)
{
u8 temp;
u8 TL,TH;
short tem;
DS18B20_Start (); // ds1820 start convert
DS18B20_Rst();
DS18B20_Check();
DS18B20_Write_Byte(0xcc); // skip rom
DS18B20_Write_Byte(0xbe); // convert
TL=DS18B20_Read_Byte(); // LSB
TH=DS18B20_Read_Byte(); // MSB
if(TH>7)
{
TH=~TH;
TL=~TL;
temp=0; //温度为负
}else temp=1; //温度为正
tem=TH; //获得高八位
tem<<=8;
tem+=TL; //获得底八位
tem=(float)tem*0.625; //转换
if(temp)return tem; //返回温度值
else return -tem;
}
3.3 lcd屏图形绘制核心算法
整个项目的功能都是在LCD显示屏上,需要绘制线段、绘制圆、绘制矩形、绘制角度线段、绘制中文、绘制数字等等,下面列出这部分的核心代码。
/*
函数功能:画横直线
函数形参:x,y:坐标
length:长度
*/
void LcdDrawThwartLine(u16 x,u16 y,u16 length,u16 color)
{
u16 i;
for(i=0;i0)incx=1; //设置单步方向
else if(delta_x==0)incx=0;//垂直线
else {incx=-1;delta_x=-delta_x;}
if(delta_y>0)incy=1;
else if(delta_y==0)incy=0;//水平线
else{incy=-1;delta_y=-delta_y;}
if( delta_x>delta_y)distance=delta_x; //选取基本增量坐标轴
else distance=delta_y;
for(t=0;t<=distance+1;t++ )//画线输出
{
LcdDrawPoint(uRow,uCol,color);//画点
xerr+=delta_x ;
yerr+=delta_y ;
if(xerr>distance)
{
xerr-=distance;
uRow+=incx;
}
if(yerr>distance)
{
yerr-=distance;
uCol+=incy;
}
}
}
//在指定位置画一个指定大小的圆
//(x,y):中心点
//r :半径
void LcdDraw_Circle(u16 x0,u16 y0,u8 r,u16 color)
{
int a,b;
int di;
a=0;b=r;
di=3-(r<<1); //判断下个点位置的标志
while(a<=b)
{
LcdDrawPoint(x0+a,y0-b,color); //5
LcdDrawPoint(x0+b,y0-a,color); //0
LcdDrawPoint(x0+b,y0+a,color); //4
LcdDrawPoint(x0+a,y0+b,color); //6
LcdDrawPoint(x0-a,y0+b,color); //1
LcdDrawPoint(x0-b,y0+a,color);
LcdDrawPoint(x0-a,y0-b,color); //2
LcdDrawPoint(x0-b,y0-a,color); //7
a++;
//使用Bresenham算法画圆
if(di<0)di +=4*a+6;
else
{
di+=10+4*(a-b);
b--;
}
}
}
/*
函数功能:任意角度画直线
参 数:
w :以圆心开始不要画的长度
len:半径
c :颜色
x,y:坐标
实际长度=len-w
*/
void LcdDrawAngleLine(u32 x,u32 y,float du,u32 len,u32 w,u16 c)
{
int i;
int x0,y0;
float k=du*(3.1415926535/180);
for(i=len-w;i;i++)>;i++)>