






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服步进电动机正常工作时,每接收一个控制脉冲就移动一个步距角,即前进一步。若连续地输入控制脉冲,电动机就相应地连续转动。 步进电动机失步包括丢步和越步。丢步时,转子前进的步数小于脉冲数;越步时,转子前进的步数多于脉冲数。一次丢步和越步的步距数等于运行拍数的整数倍。丢步严重时,将使转子停留在一个位置上或围绕一个位置振动,越步严重时,机床将发生过冲。
失步原因及策略
(1)转子的加速度慢于步进电动机的旋转磁场
解释:转子的加速度慢于步进电动机的旋转磁场,即低于换相速度时,步进电动机会产生失步。这是因为输入电动机的电能不足,在步进电动机中产生的同步力矩无法使转子速度跟随定子磁场的旋转速度,从而引起失步。由于步进电动机的动态输出转矩随着连续运行频率的上升而降低,因而,凡是比该频率高的工作频率都将产生丢步。这种失步说明步进电动机的转矩不足,拖动能力不够。
解决方法:a、使步进电动机本身产生的电磁转矩增大。为此可在额定电流范围内适当加大驱动电流;在高频范围转矩不足时,可适当提高驱动电路的驱动电压;改用转矩大的步进电动机等。b、使步进电动机需要克服的转矩减小。为此可适当降低电动机运行频率,以便提高电动机的输出转矩;设定较长的加速时间,以便转子获得足够的能量。
(2)转子的平均速度高于定子磁场的平均旋转速度
解释:转子的平均速度高于定子磁场的平均旋转速度,这时定子通电励磁的时间较长,大于转子步进一步所需的时间,则转子在步进过程中获得了过多的能量,使得步进电动机产生的输出转矩增大,从而使电动机越步。当用步进电动机驱动那些使负载上、下动作的机构时,更易产生越步现象,这是因为负载向下运动时,电动机所需的转矩减小。
解决方法:减小步进电动机的驱动电流,以便降低步进电动机的输出转矩。
(3)步进电动机及所带负载存在惯性
解释: 由于步进电动机自身及所带负载存在惯性,使得电动机在工作过程中不能立即起动和停止,而是在起动时出现丢步,在停止时发生越步。
解决方法:通过一个加速和减速过程,即以较低的速度起动,而后逐渐加速到某一速度运行,再逐渐减速直至停止。进行合理、平滑的加减速控制是保证步进驱动系统可靠、高效、精确运行的关键。
(4)步进电动机产生共振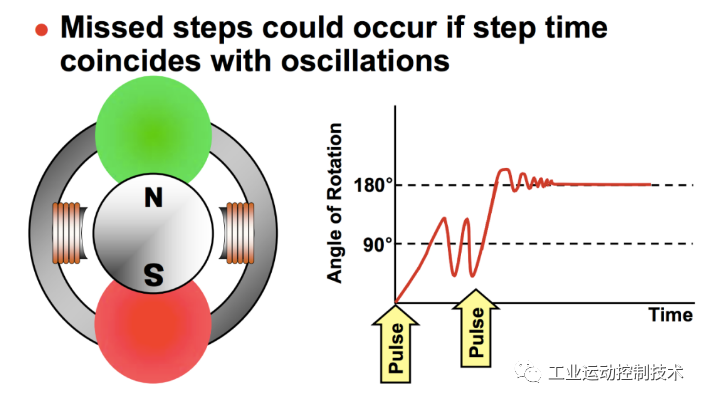 解释:共振也是引起失步的一个原因。步进电动机处于连续运行状态时,如果控制脉冲的频率等于步进电动机的固有频率,将产生共振。在一个控制脉冲周期内,振动得不到充分衰减,下一个脉冲就来到,因而在共振频率附近动态误差最大并会导致步进电动机失步。
解释:共振也是引起失步的一个原因。步进电动机处于连续运行状态时,如果控制脉冲的频率等于步进电动机的固有频率,将产生共振。在一个控制脉冲周期内,振动得不到充分衰减,下一个脉冲就来到,因而在共振频率附近动态误差最大并会导致步进电动机失步。
解决方法:适当减小步进电动机的驱动电流;采用细分驱动方法;采用阻尼方法,包括机械阻尼法。以上方法都能有效消除电动机振荡,避免失步现象发生。
(5)改变方向时丢脉冲
解释:表现为往任何一个方向都准,但一改变方向就累计偏差,并且次数越多偏得越多。
解决方案:一般的步进驱动器对方向和脉冲信号都有一定的要求,如:方向信号在第一个脉冲上升沿或下降沿(不同的驱动器要求不一样)到来前数微秒被确定,否则会有一个脉冲所运转的角度与实际需要的转向相反,最后故障现象表现为越走越偏,细分越小越明显,解决办法主要用软件改变发脉冲的逻辑或加延时。
(6)软件缺陷
解释:控制程序导致失步也不少见,需要检查控制程序是不是有问题。
解决方案:一时找不到问题原因,也有工程师会让步进电机运行一段时间就重新找原点归位。
相关文章









