1 引 言
扫频仪通常用于广播电视设备的幅频特性的测量。压控振荡器(VCO)因结构简单,响应速度快,输出频带宽,波形失真小等优点,广泛用作扫频信号源。由于振荡器的控制电压uf与输出频率fpu之间一般不成线性关系,为保证测量的频率准确度,需对V/F特性进行线性化。传统的方法是通过由二极管和电阻组成的非线性网络对控制电压进行预失真以实现频率的线性化。该方法要求获得VCO准确的模型参数以调整校正网络。用此法构成的系统是一开环系统,对各种变化和扰动没有抑制能力。随着元器件的老化,器件的各参数在不断变化,校正网络需要不定期进行调整。此外,变容二极管的结电容受温度变化影响较大,严重影响振荡器的频率稳定度,因此,必须设法消除温度对频率的影响。本文提出了一种利用单片机引入反馈校正的闭环的调节方案,并给出了调节器、控制器的设计和实现。
2 压控振荡器的V/F特性
压控振荡器本质上是一个在LC回路中接有变容管的三点式振荡器(见图5)。控制电压反向加在变容管上。改变控制电压的大小可改变变容管的结电容的大小,从而改变振荡器的振荡频率 。当控制电压在变容管接触电位VΦ与变容管反向击穿电压VBr之间时,结电容与控制电压uf的关系为:
式(1)中,Uf为控制电压;VΦ为变容管接触电位,对于硅管,约为0.5~0.7V;C(0)为零偏置电压时的结电容,如DKV6550B型变容管C(0)>3pF;n为电容指数。又三点式振荡器的振荡频率:
![]()
输出信号振荡频率与控制电压Uf的关系为:
 (3)
(3)
可见,当n=2时,V/F关系成线性,一般为非线性。式(3)为VCO电压频率的稳态特性。
3 电压频率特性线性校正原理及实现
本方案采用参考模型法实现V/F特性的线性化,框图如图(1)所示。本方案利用理想模型fmu与实际系统fpu输出频率之差eu对系统进行校正,实现线性化。其关键是调节器和控制器的设计。
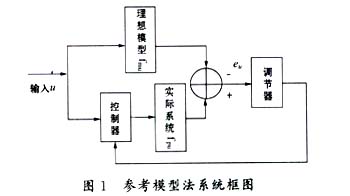
在经典的扫频测量中,通常利用信号源产生一系列频率步进的点频信号去激励被测网络,测得网络的稳态响应,求出被测网络的幅频特性。为了保证测量的频率准确度,要求实际系统fpu能在各点上无稳态误差地跟踪理想模型fmu的输出。建立VCO的V/F特性的理想线性模型如下:
fmu=f0+KVufLLLLLLL(4)
其中,f0为控制为0时输出信号的频率,v为压控斜率。
定义误差:

为产生点频信号,我们根据理想模型fmu计算控制电压uf的大小,在实际系统fpu上加控制电压uf,由校正网络消除稳态误差,实现无稳态误差地跟踪理想模型fmu的输出。因为输入的控制电压Uf为阶跃信号,故可以采用PI校正来消除稳态误差。系统实际结构如图2所示。
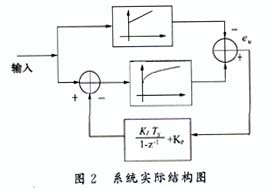
其中KI为积分系数,Kp为比例系数,Ts为采样周期。
系统稳定性和稳态误差分析:
由于VCO的响应速度远快于系统其它环节,因此,可将VCO模型看作一纯粹的非线性增益环节 ,可在其当前工作点的邻域内对其线性化。如非线性系统fpu当前输入为uc,在u′c点邻域内对其线性化。由Taylor级数展开得:

忽略二次项及高次项得非线性系统fpu在u点邻域内的动态特性:

回路的传递函数:
系统的特征方程:


可见,系统稳态误差收敛于0,即系统对阶跃输入无稳态误差,PI校正网络能实现实际系统fp无稳态误差地跟踪理想模型fmu的输出。
4 仿真验证
我们采用MatLab对上述方案进行仿真实验。根据上述分析,建立模型如图(3)所示。
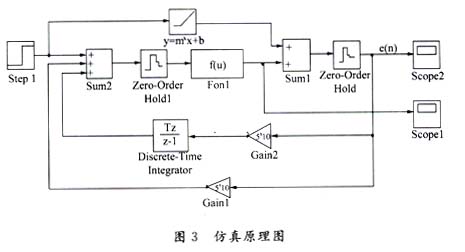
其中,输入Step为阶跃信号,非线性系统fpu(u)=106*(1+2u)0.5,理想模型fmu(u)=106+0.35*106,积分系数KI=0.5*10-3,比例系数KP=0.2*10-6,采样周期TS=1ms,若计划输出信号频率f=2.4*106,由理想模型可计算出输入Step=4U(t-0.01),仿真的结果如图(4)所示。由图3的仿真原理图有,fmu(4)=106+0.35*106*4=24*106,fpu=106*(1+2*4)0.5=3*106,(eu)=0.6*106。由图可知,经过6~7次迭代,系统达到稳态。适当调整比例系数KP和积分系数KI的大小可以改善系统的响应速度和其它动态特性。

5 对温度影响的抑制
温度对VCO的影响主要体现在变容管结电容的大小随温度的升高而增加上。由式(3),(7)和(8)可知,温度的变化只影响了VCO电压频率特性曲线的各点斜率的大小,并不改变系统的稳定性和系统稳态误差的收敛性,只影响系统收敛的速度,对校正的效果并不产生实质的影响。可见,PI闭环校正可以抑制温度对频率的影响。
6 系统实现
图(5)是实现图(3)所示系统的8051单片机系统框图。
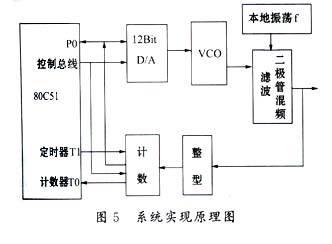
本系统采用80C51单片机作控制器。控制电压由D/A输出,经放大,驱动VCO。VCO输出经由二极管混频网络进行差频,再经滤波输出正弦信号;整形电路整形成脉冲波,由计数器对其计数以测得输出信号的频率。80C51单片机的计数器T0工作在计数器模式,作为计数器的扩展;计数器T1工作在定时器模式,提供计数闸门时间。80C51单片机根据测得的实际系统输出信号的频率与理想模型输出之差,由PI校正算法调整控制电压的大小,构成闭环反馈,以实现对理想输出的无稳态误差的跟踪。PI校正算法由单片机控制程序实现。
7 结束语
本方案并不要求获得VCO的精确模型,对建模误差、元器件的分散性及元件老化引起的模型误差有一定的鲁棒性;通过软件设计,能方便地实现系统自动调零、自动校准。笔者设计的信号源,采用上述方案,取得了理想的效果。