STM32的SPI接口、cubeMX软件配置SPI接口和分析SPI相关代码
本文主要介绍STM32的SPI接口、cubeMX软件配置SPI接口和分析SPI相关代码。
STM32之SPI简介:
SPI协议【Serial Peripheral Interface】
串行外围设备接口,是一种高速全双工的通信总线。主要用在MCU与FLASHADCLCD等模块之间的通信。
SPI信号线
SPI 共包含 4 条总线。
SS(Slave Select):片选信号线,当有多个SPI 设备与 MCU 相连时,每个设备的这个片选信号线是与 MCU 单独的引脚相连的,而其他的 SCK、MOSI、MISO 线则为多个设备并联到相同的 SPI 总线上,低电平有效。
SCK (Serial Clock):时钟信号线,由主通信设备产生,不同的设备支持的时钟频率不一样,如 STM32 的 SPI 时钟频率最大为 f PCLK /2。
MOSI (Master Output Slave Input):主设备输出 / 从设备输入引脚。主机的数据从这条信号线输出,从机由这条信号线读入数据,即这条线上数据的方向为主机到从机。
MISO(Master Input Slave Output):主设备输入 / 从设备输出引脚。主机从这条信号线读入数据,从机的数据则由这条信号线输出,即在这条线上数据的方向为从机到主机。
其中SCK,MOSI,MISO是接在一起的,NSS分别接到不同的IO管脚控制。主器件要和从器件通信就先拉低对应从器件的NSS管脚使能。默认状态IO1,IO2,IO3全为高电平,当主器件和从器件1通信时,拉低IO1管脚使能从器件1。而从器件2,3不使能,不作响应。下图是主器件与多个从器件通信图。

SPI特性
单次传输可选择为 8 或 16 位。波特率预分频系数(最大为 fPCLK/2) 。时钟极性(CPOL)和相位(CPHA)可编程设置。数据顺序的传输顺序可进行编程选择,MSB 在前或 LSB 在前。
注:MSB(Most Significant Bit)是“最高有效位”,LSB(Least Significant Bit)是“最低有效位”。
可触发中断的专用发送和接收标志。可以使用 DMA 进行数据传输操作。下图是STM32的SPI框架图。

如上图,MISO数据线接收到的信号经移位寄存器处理后把数据转移到接收缓冲区,然后这个数据就可以由我们的软件从接收缓冲区读出了。当要发送数据时,我们把数据写入发送缓冲区,硬件将会把它用移位寄存器处理后输出到 MOSI数据线。SCK 的时钟信号则由波特率发生器产生,我们可以通过波特率控制位(BR)来控制它输出的波特率。
控制寄存器 CR1掌管着主控制电路,STM32的 SPI模块的协议设置(时钟极性、相位等)就是由它来制定的。而控制寄存器 CR2则用于设置各种中断使能。
最后为 NSS引脚,这个引脚扮演着 SPI协议中的SS片选信号线的角色,如果我们把 NSS引脚配置为硬件自动控制,SPI模块能够自动判别它能否成为 SPI的主机,或自动进入 SPI从机模式。但实际上我们用得更多的是由软件控制某些 GPIO引脚单独作为SS信号,这个 GPIO引脚可以随便选择。
SPI时钟时序
根据时钟极性(CPOL)及相位(CPHA)不同,SPI有四种工作模式。
时钟极性(CPOL)定义了时钟空闲状态电平:
CPOL=0为时钟空闲时为低电平
CPOL=1为时钟空闲时为高电平
时钟相位(CPHA)定义数据的采集时间。
CPHA=0:在时钟的第一个跳变沿(上升沿或下降沿)进行数据采样。
CPHA=1:在时钟的第二个跳变沿(上升沿或下降沿)进行数据采样。

CubeMX软件配置SPI:
下面继续介绍cubeMX软件配置STM32L152的SPI接口方法。
(1)打开软件,选择对应芯片后,配置好时钟源;
(2)勾选SPI1为全双工,硬件NSS关闭,如下图:

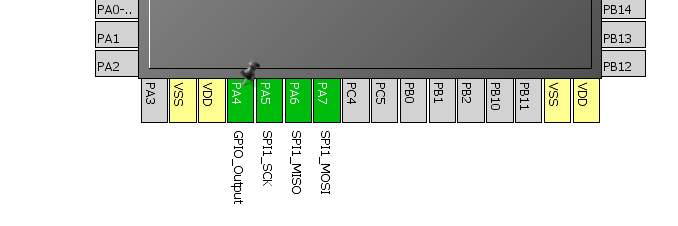
(3)勾选好后,PA5、PA6、PA7如下图,在配置PA4为普通io口,gpio_output
(4)SPI1的参数配置选择默认,如下图所示

(5)生成代码,保存即可。
HAL库的SPI函数分析:
下面具体分析下生成的SPI函数和函数调用。
SPI_HandleTypeDef hspi1; //SPI结构体类定义,下面看其结构体内部的声明。



下面分析SPI的初始化函数:
void HAL_SPI_MspInit(SPI_HandleTypeDef* hspi){GPIO_InitTypeDef GPIO_InitStruct;if(hspi->Instance==SPI1){/* USER CODE BEGIN SPI1_MspInit 0 *//* USER CODE END SPI1_MspInit 0 *//* Peripheral clock enable */__HAL_RCC_SPI1_CLK_ENABLE();//使能SPI1时钟/**SPI1 GPIO ConfigurationPA5 ------> SPI1_SCKPA6 ------> SPI1_MISOPA7 ------> SPI1_MOSI*/GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;GPIO_InitStruct.Alternate = GPIO_AF5_SPI1;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);//配置SPI的数据线和时钟线/* USER CODE BEGIN SPI1_MspInit 1 *//* USER CODE END SPI1_MspInit 1 */} static void MX_SPI1_Init(void){hspi1.Instance = SPI1;hspi1.Init.Mode = SPI_MODE_MASTER;//主模式hspi1.Init.Direction = SPI_DIRECTION_2LINES;//全双工hspi1.Init.DataSize = SPI_DATASIZE_8BIT;//数据位为8位hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;//CPOL=0,lowhspi1.Init.CLKPhase = SPI_PHASE_1EDGE;//CPHA为数据线的第一个变化沿hspi1.Init.NSS = SPI_NSS_SOFT;//软件控制NSShspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_2;//2分频,32M/2=16MHzhspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;//最高位先发送hspi1.Init.TIMode = SPI_TIMODE_DISABLE;//TIMODE模式关闭hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;//CRC关闭hspi1.Init.CRCPolynomial = 10;//默认值,无效if (HAL_SPI_Init(&hspi1) != HAL_OK)//初始化{_Error_Handler(__FILE__, __LINE__);}}
利用SPI接口发送和接收数据主要调用以下两个函数:
HAL_StatusTypeDef HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);//发送数据HAL_StatusTypeDefHAL_SPI_Receive(SPI_HandleTypeDef*hspi,uint8_t*pData,uint16_tSize,uint32_tTimeout);//接收数据
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。