






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服一、概述
1、说明
每一款芯片的启动文件都值得去研究,因为它可是你的程序跑的最初一段路,不可以不知道。通过了解启动文件,我们可以体会到处理器的架构、指令集、中断向量安排等内容,是非常值得玩味的。
STM32作为一款高端 Cortex-M3系列单片机,有必要了解它的启动文件。打好基础,为以后优化程序,写出高质量的代码最准备。
本文以一个实际测试代码--START_TEST为例进行阐述。
2、整体过程概括
STM32整个启动过程是指从上电开始,一直到运行到 main函数之间的这段过程,步骤为(以使用微库为例):
①上电后硬件设置SP、PC
②设置系统时钟
③软件设置SP
④加载.data、.bss,并初始化栈区
⑤跳转到C文件的main函数
3、整个启动过程涉及的代码
推荐阅读深入理解MCU启动原理
启动过程涉及的文件不仅包含 startup_stm32f10x_hd.s,还涉及到了MDK自带的连接库文件 entry.o、entry2.o、entry5.o、entry7.o等(从生成的 map文件可以看出来)。
二、程序在Flash上的存储结构
在真正讲解启动过程之前,先要讲解程序下载到 Flash上的结构和程序运行时(执行到main函数)时的SRAM数据结构。程序在用户Flash上的结构如下图所示。下图是通过阅读hex文件和在MDK下调试综合提炼出来的。
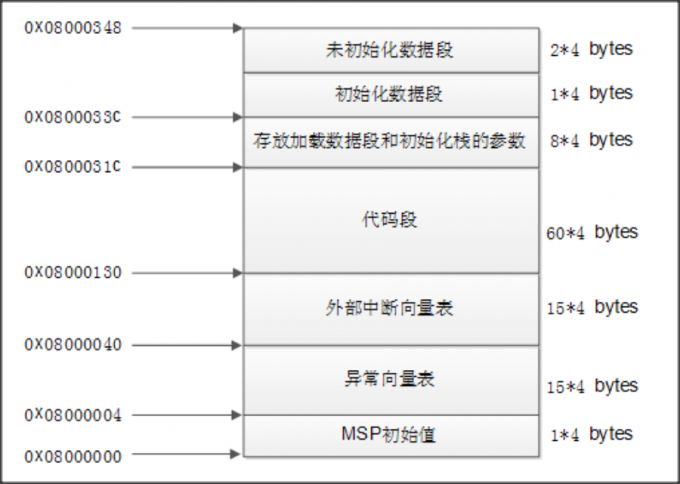
MSP初始值 编译器生成,主堆栈的初始值
异常向量表 不多说
外部中断向量表 不多说
代码段 存放代码
初始化数据段 .data
未初始化数据段 .bss
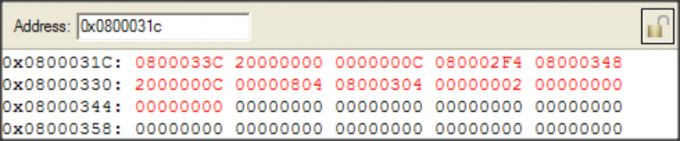
加载数据段和初始化栈的参数
加载数据段和初始化栈的参数分别有4个,这里只讲解加载数据段的参数,至于初始化栈的参数类似。
0x0800033c Flash上的数据段(初始化数据段和未初始化数据段)起始地址
0x20000000 加载到SRAM上的目的地址
0x0000000c 数据段的总大小
0x080002f4 调用函数_scatterload_copy
需要说明的是初始化栈的函数-- 0x08000304与加载数据段的函数不一样,为 _scatterload_zeroinit,它的目的就是将栈空间清零。
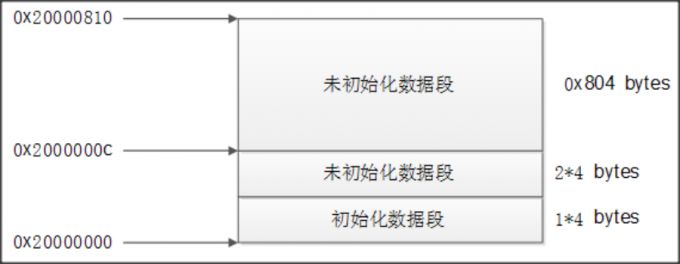
三、数据在SRAM上的结构
程序运行时(执行到main函数)时的SRAM数据结构
四、详细过程分析
有了以上的基础,现在详细分析启动过程。
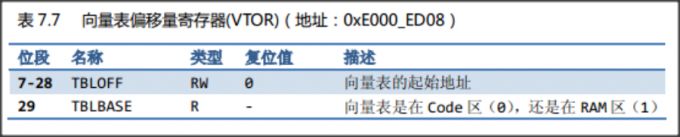
1、上电后硬件设置SP、PC
刚上电复位后,硬件会自动根据向量表偏移地址找到向量表,向量表偏移地址的定义如下:
调试现象如下:

看看我们的向量表内容(通过J-Flash打开hex文件)
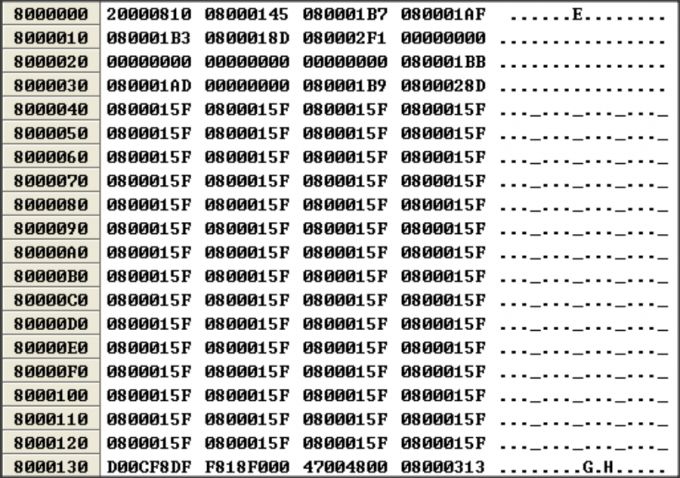
硬件这时自动从0x0800 0000位置处读取数据赋给栈指针SP,然后自动从0x0800 0004位置处读取数据赋给PC,完成复位,结果为:
SP = 0x02000810
PC = 0x08000145
2、设置系统时钟
上一步中令 PC=0x08000145的地址没有对齐,硬件自动对齐到 0x08000144,执行 SystemInit函数初始化系统时钟。
3、软件设置SP
LDR R0,=__main
BX R0
执行上两条之类,跳转到 __main程序段运行,注意不是main函数, ___main的地址是0x0800 0130。
可以看到指令LDR.W sp,[pc,#12],结果SP=0x2000 0810。
4、加载.data、.bss,并初始化栈区
BL.W __scatterload_rt2
进入 __scatterload_rt2代码段。
__scatterload_rt2:
0x080001684C06 LDR r4,[pc,#24] ; @0x08000184
0x0800016A4D07 LDR r5,[pc,#28] ; @0x08000188
0x0800016C E006 B 0x0800017C
0x0800016E68E0 LDR r0,[r4,#0x0C]
0x08000170 F0400301 ORR r3,r0,#0x01
0x08000174 E8940007 LDM r4,{r0-r2}
0x080001784798 BLX r3
0x0800017A3410 ADDS r4,r4,#0x10
0x0800017C42AC CMP r4,r5
0x0800017E D3F6 BCC 0x0800016E
0x08000180 F7FFFFDA BL.W _main_init (0x08000138)
这段代码是个循环 (BCC0x0800016e),实际运行时候循环了两次。第一次运行的时候,读取“加载数据段的函数 (_scatterload_copy)”的地址并跳转到该函数处运行(注意加载已初始化数据段和未初始化数据段用的是同一个函数);第二次运行的时候,读取“初始化栈的函数 (_scatterload_zeroinit)”的地址并跳转到该函数处运行。相应的代码如下:
0x0800016E68E0 LDR r0,[r4,#0x0C]
0x08000170 F0400301 ORR r3,r0,#0x01
0x08000174
0x080001784798 BLX r3
当然执行这两个函数的时候,还需要传入参数。至于参数,我们在“加载数据段和初始化栈的参数”环节已经阐述过了。当这两个函数都执行完后,结果就是“数据在SRAM上的结构”所展示的图。最后,也把事实加载和初始化的两个函数代码奉上如下:
__scatterload_copy:
0x080002F4 E002 B 0x080002FC
0x080002F6 C808 LDM r0!,{r3}
0x080002F81F12 SUBS r2,r2,#4
0x080002FA C108 STM r1!,{r3}
0x080002FC2A00 CMP r2,#0x00
0x080002FE D1FA BNE 0x080002F6
0x080003004770 BX lr
__scatterload_null:
0x080003024770 BX lr
__scatterload_zeroinit:
0x080003042000 MOVS r0,#0x00
0x08000306 E001 B 0x0800030C
0x08000308 C101 STM r1!,{r0}
0x0800030A1F12 SUBS r2,r2,#4
0x0800030C2A00 CMP r2,#0x00
0x0800030E D1FB BNE 0x08000308
0x080003104770 BX lr
5、跳转到C文件的main函数
_main_init:
0x080001384800 LDR r0,[pc,#0] ; @0x0800013C
0x0800013A4700 BX r0
五、异常向量与中断向量表
; VectorTableMapped to Address0 at Reset
AREA RESET, DATA, READONLY
EXPORT __Vectors
EXPORT __Vectors_End
EXPORT __Vectors_Size
__Vectors DCD __initial_sp ; Top of Stack
DCD Reset_Handler; ResetHandler
DCD NMI_Handler ; NMI Handler
DCD HardFault_Handler; HardFaultHandler
DCD MemManage_Handler; MPU FaultHandler
DCD BusFault_Handler; BusFaultHandler
DCD UsageFault_Handler; UsageFaultHandler
DCD 0; Reserved
DCD 0; Reserved
DCD 0; Reserved
DCD 0; Reserved
DCD SVC_Handler ; SVCallHandler
DCD DebugMon_Handler; DebugMonitorHandler
DCD 0; Reserved
DCD PendSV_Handler; PendSVHandler
DCD SysTick_Handler; SysTickHandler
; ExternalInterrupts
DCD WWDG_IRQHandler ; WindowWatchdog
DCD PVD_IRQHandler ; PVD through EXTI Line detect
DCD TAMPER_IRQHandler ; Tamper
DCD RTC_IRQHandler ; RTC
DCD FLASH_IRQHandler ; Flash
DCD RCC_IRQHandler ; RCC
DCD EXTI0_IRQHandler ; EXTI Line0
DCD EXTI1_IRQHandler ; EXTI Line1
DCD EXTI2_IRQHandler ; EXTI Line2
DCD EXTI3_IRQHandler ; EXTI Line3
DCD EXTI4_IRQHandler ; EXTI Line4
DCD DMA1_Channel1_IRQHandler ; DMA1 Channel1
DCD DMA1_Channel2_IRQHandler ; DMA1 Channel2
DCD DMA1_Channel3_IRQHandler ; DMA1 Channel3
DCD DMA1_Channel4_IRQHandler ; DMA1 Channel4
DCD DMA1_Channel5_IRQHandler ; DMA1 Channel5
DCD DMA1_Channel6_IRQHandler ; DMA1 Channel6
DCD DMA1_Channel7_IRQHandler ; DMA1 Channel7
DCD ADC1_2_IRQHandler ; ADC1 & ADC2
DCD USB_HP_CAN1_TX_IRQHandler ; USB HighPriority or CAN1 TX
DCD USB_LP_CAN1_RX0_IRQHandler ; USB LowPriority or CAN1 RX0
DCD CAN1_RX1_IRQHandler ; CAN1 RX1
DCD CAN1_SCE_IRQHandler ; CAN1 SCE
DCD EXTI9_5_IRQHandler ; EXTI Line9..5
DCD TIM1_BRK_IRQHandler ; TIM1 Break
DCD TIM1_UP_IRQHandler ; TIM1 Update
DCD TIM1_TRG_COM_IRQHandler ; TIM1 Trigger and Commutation
DCD TIM1_CC_IRQHandler ; TIM1 CaptureCompare
DCD TIM2_IRQHandler ; TIM2
DCD TIM3_IRQHandler ; TIM3
DCD TIM4_IRQHandler ; TIM4
DCD I2C1_EV_IRQHandler ; I2C1 Event
DCD I2C1_ER_IRQHandler ; I2C1 Error
DCD I2C2_EV_IRQHandler ; I2C2 Event
DCD I2C2_ER_IRQHandler ; I2C2 Error
DCD SPI1_IRQHandler ; SPI1
DCD SPI2_IRQHandler ; SPI2
DCD USART1_IRQHandler ; USART1
DCD USART2_IRQHandler ; USART2
DCD USART3_IRQHandler ; USART3
DCD EXTI15_10_IRQHandler ; EXTI Line15..10
DCD RTCAlarm_IRQHandler; RTC Alarm through EXTI Line
DCD USBWakeUp_IRQHandler; USB Wakeup from suspend
DCD TIM8_BRK_IRQHandler ; TIM8 Break
DCD TIM8_UP_IRQHandler ; TIM8 Update
DCD TIM8_TRG_COM_IRQHandler ; TIM8 Trigger and Commutation
DCD TIM8_CC_IRQHandler ; TIM8 CaptureCompare
DCD ADC3_IRQHandler ; ADC3
DCD FSMC_IRQHandler ; FSMC
DCD SDIO_IRQHandler ; SDIO
DCD TIM5_IRQHandler ; TIM5
DCD SPI3_IRQHandler ; SPI3
DCD UART4_IRQHandler ; UART4
DCD UART5_IRQHandler ; UART5
DCD TIM6_IRQHandler ; TIM6
DCD TIM7_IRQHandler ; TIM7
DCD DMA2_Channel1_IRQHandler ; DMA2 Channel1
DCD DMA2_Channel2_IRQHandler ; DMA2 Channel2
DCD DMA2_Channel3_IRQHandler ; DMA2 Channel3
DCD DMA2_Channel4_5_IRQHandler ; DMA2 Channel4& Channel5
__Vectors_End
这段代码就是定义异常向量表,在之前有一个“J-Flash打开hex文件”的图片跟这个表格是一一对应的。编译器根据我们定义的函数 Reset_Handler、NMI_Handler等,在连接程序阶段将这个向量表填入这些函数的地址。
startup_stm32f10x_hd.s内容:
N MI_Handler PROC
EXPORT NMI_Handler [WEAK]
B .
ENDP
stm32f10x_it.c中内容:
void NMI_Handler(void)
{
}
在启动汇编文件中已经定义了函数 NMI_Handler,但是使用了“弱”,它允许我们再重新定义一个 NMI_Handler函数,程序在编译的时候会将汇编文件中的弱函数“覆盖掉”--两个函数的代码在连接后都存在,只是在中断向量表中的地址填入的是我们重新定义函数的地址。
六、使用微库与不使用微库的区别
使用微库就意味着我们不想使用MDK提供的库函数,而想用自己定义的库函数,比如说printf函数。那么这一点是怎样实现的呢?我们以printf函数为例进行说明。
1、不使用微库而使用系统库
在连接程序时,肯定会把系统中包含printf函数的库拿来调用参与连接,即代码段有系统库的参与。
在启动过程中,不使用微库而使用系统库在初始化栈的时候,还需要初始化堆(猜测系统库需要用到堆),而使用微库则是不需要的。
IF __MICROLIB
EXPORT __initial_sp
EXPORT __heap_base
EXPORT __heap_limit
ELSE
IMPORT __use_two_region_memory
EXPORT __user_initial_stackheap
__user_initial_stackheap
LDR R0, = Heap_Mem
LDR R1, =(Stack_Mem+ Stack_Size)
LDR R2, = (Heap_Mem+ Heap_Size)
LDR R3, = Stack_Mem
BX LR
ALIGN
ENDIF
另外,在执行 __main函数的过程中,不仅需要完成“使用微库”情况下的所有工作,额外的工作还需要进行库的初始化,才能使用系统库(这一部分我还没有深入探讨)。附上 __main函数的内容:
__main:
0x08000130 F000F802 BL.W __scatterload_rt2_thumb_only (0x08000138)
0x08000134 F000F83C BL.W __rt_entry_sh (0x080001B0)
__scatterload_rt2_thumb_only:
0x08000138 A00A ADR r0,{pc}+4; @0x08000164
0x0800013A E8900C00 LDM r0,{r10-r11}
0x0800013E4482 ADD r10,r10,r0
0x080001404483 ADD r11,r11,r0
0x08000142 F1AA0701 SUB r7,r10,#0x01
__scatterload_null:
0x0800014645DA CMP r10,r11
0x08000148 D101 BNE 0x0800014E
0x0800014A F000F831 BL.W __rt_entry_sh (0x080001B0)
0x0800014E F2AF0E09 ADR.W lr,{pc}-0x07; @0x08000147
0x08000152 E8BA000F LDM r10!,{r0-r3}
0x08000156 F0130F01 TST r3,#0x01
0x0800015A BF18 IT NE
0x0800015C1AFB SUBNE r3,r7,r3
0x0800015E F0430301 ORR r3,r3,#0x01
0x080001624718 BX r3
0x080001640298 LSLS r0,r3,#10
0x080001660000 MOVS r0,r0
0x0800016802B8 LSLS r0,r7,#10
0x0800016A0000 MOVS r0,r0
__scatterload_copy:
0x0800016C3A10 SUBS r2,r2,#0x10
0x0800016E BF24 ITT CS
0x08000170 C878 LDMCS r0!,{r3-r6}
0x08000172 C178 STMCS r1!,{r3-r6}
0x08000174 D8FA BHI __scatterload_copy (0x0800016C)
0x080001760752 LSLS r2,r2,#29
0x08000178 BF24 ITT CS
0x0800017A C830 LDMCS r0!,{r4-r5}
0x0800017C C130 STMCS r1!,{r4-r5}
0x0800017E BF44 ITT MI
0x080001806804 LDRMI r4,[r0,#0x00]
0x08000182600C STRMI r4,[r1,#0x00]
0x080001844770 BX lr
0x080001860000 MOVS r0,r0
__scatterload_zeroinit:
0x080001882300 MOVS r3,#0x00
0x0800018A2400 MOVS r4,#0x00
0x0800018C2500 MOVS r5,#0x00
0x0800018E2600 MOVS r6,#0x00
0x080001903A10 SUBS r2,r2,#0x10
0x08000192 BF28 IT CS
0x08000194 C178 STMCS r1!,{r3-r6}
0x08000196 D8FB BHI 0x08000190
0x080001980752 LSLS r2,r2,#29
0x0800019A BF28 IT CS
0x0800019C C130 STMCS r1!,{r4-r5}
0x0800019E BF48 IT MI
0x080001A0600B STRMI r3,[r1,#0x00]
0x080001A24770 BX lr
__rt_lib_init:
0x080001A4 B51F PUSH {r0-r4,lr}
0x080001A6 F3AF8000 NOP.W
__rt_lib_init_user_alloc_1:
0x080001AA BD1F POP {r0-r4,pc}
__rt_lib_shutdown:
0x080001AC B510 PUSH {r4,lr}
__rt_lib_shutdown_user_alloc_1:
0x080001AE BD10 POP {r4,pc}
__rt_entry_sh:
0x080001B0 F000F82F BL.W __user_setup_stackheap (0x08000212)
0x080001B44611 MOV r1,r2
__rt_entry_postsh_1:
0x080001B6 F7FFFFF5 BL.W __rt_lib_init (0x080001A4)
__rt_entry_postli_1:
0x080001BA F000F919 BL.W main (0x080003F0)
2、使用微库而不使用系统库
在程序连接时,不会把包含printf函数的库连接到终极目标文件中,而使用我们定义的库。
启动时需要完成的工作就是之前论述的步骤1、2、3、4、5,相比使用系统库,启动过程步骤更少。
相关文章









