以三菱PLC控制伺服马达为例,具体分享一下伺服马达控制步骤。
1.设置定位模块基本参数
在智能功能模块中(QD77MS系列)根据机械配置不同设置好相应的参数
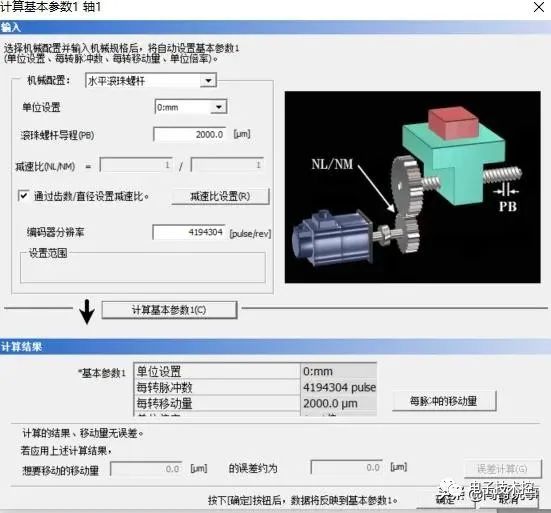
基本参数设置
2.设置原点回归基本参数
根据实际情况选择:近点DOG型、数据设定型、计数型等原点回归方式。

原点回归方式
3.设置伺服放大器参数
设置绝对位置系统、相对位置系统、自动调谐相应等参数,也可以选择“一键式调整”进行相关的参数设置。
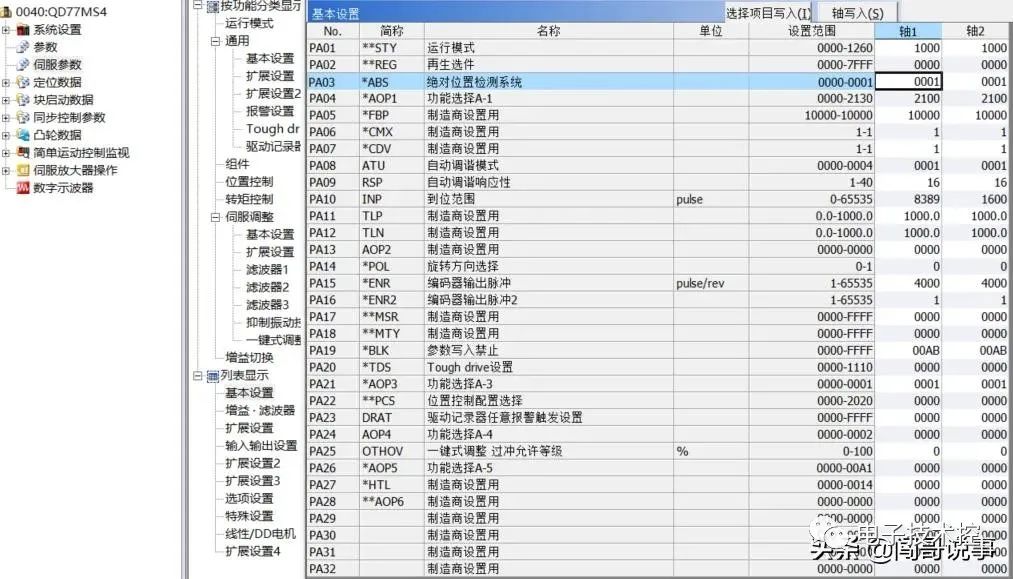
伺服放大器参数设置
4.伺服外部信号程序
包含伺服马达电源信号、伺服马达刹车信号等外围接入信号。
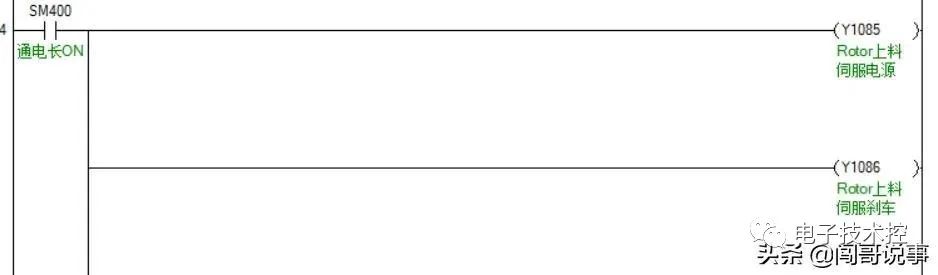
外部信号程序
5.原点回归程序
根据不同的原点回归方式,进行原点回归。
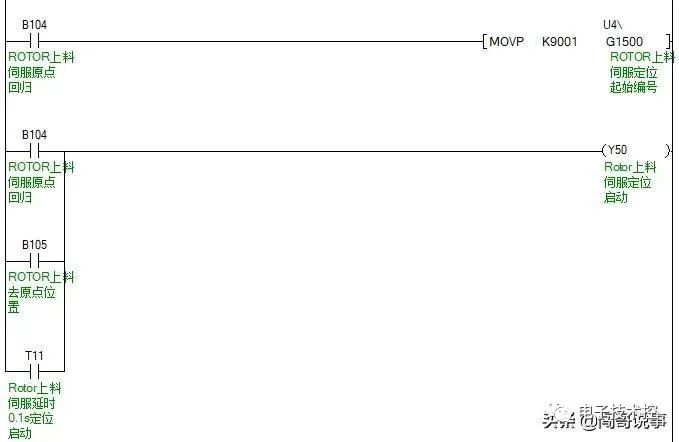
原点回归程序
6.手动程序
JOG+、JOG-、伺服停止、伺服报警复位等与PLC CPU 输入/输出信号。
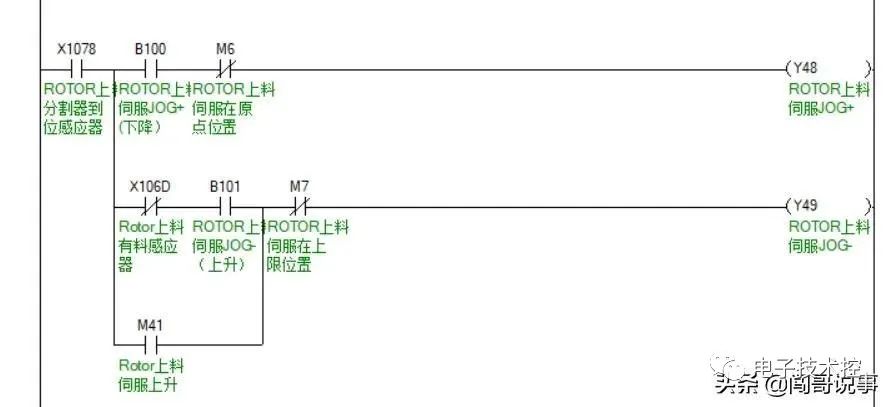
手动程序
7.当前参数反馈&控制参数写入程序
①.反馈参数:
伺服马达的当前位置、报警代码、当前速度等。
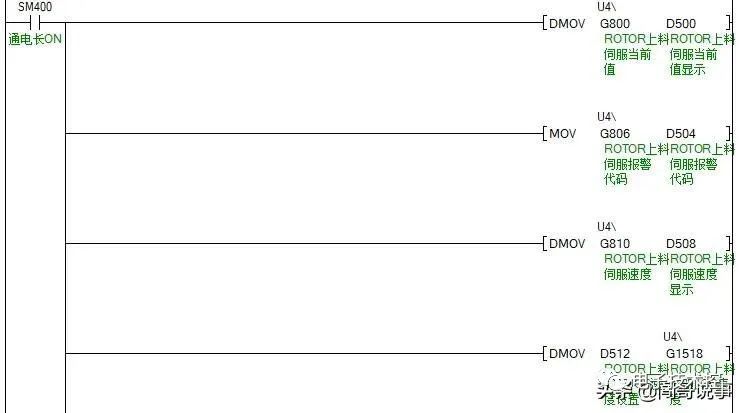
当前状态反馈
②.控制参数:
写入JOG速度、伺服定位速度等相关的控制参数。
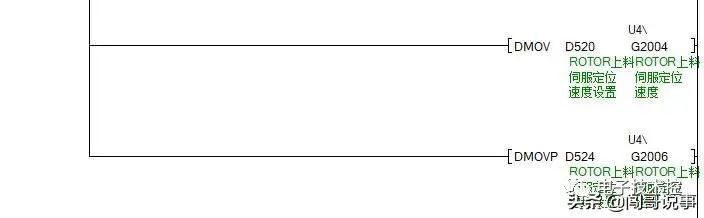
控制参数
8.伺服定位启动程序
包含伺服定位起始编号、定位地址、定位启动信号。
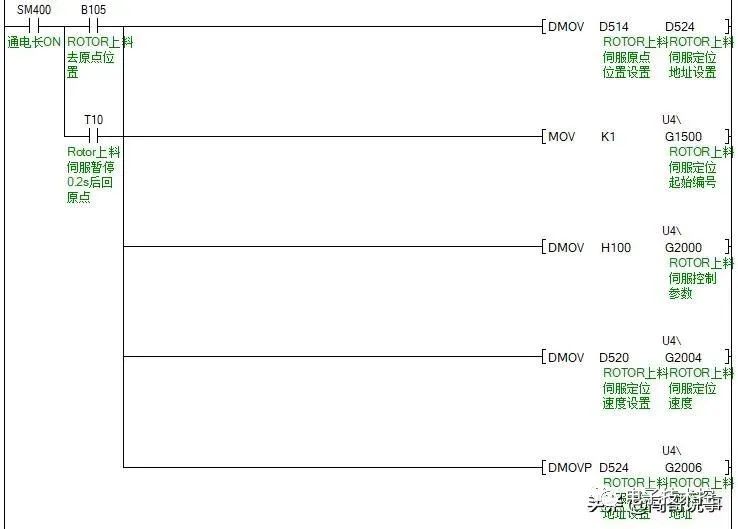
定位启动参数写入
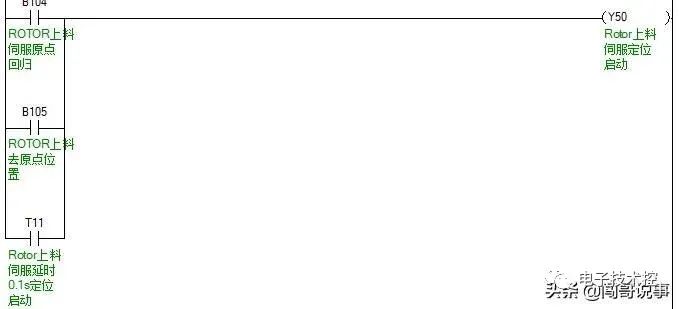
定位启动
9.试运行
按照以上的步骤,就可以试运行伺服马达了。
关注我,学习更多电气知识!
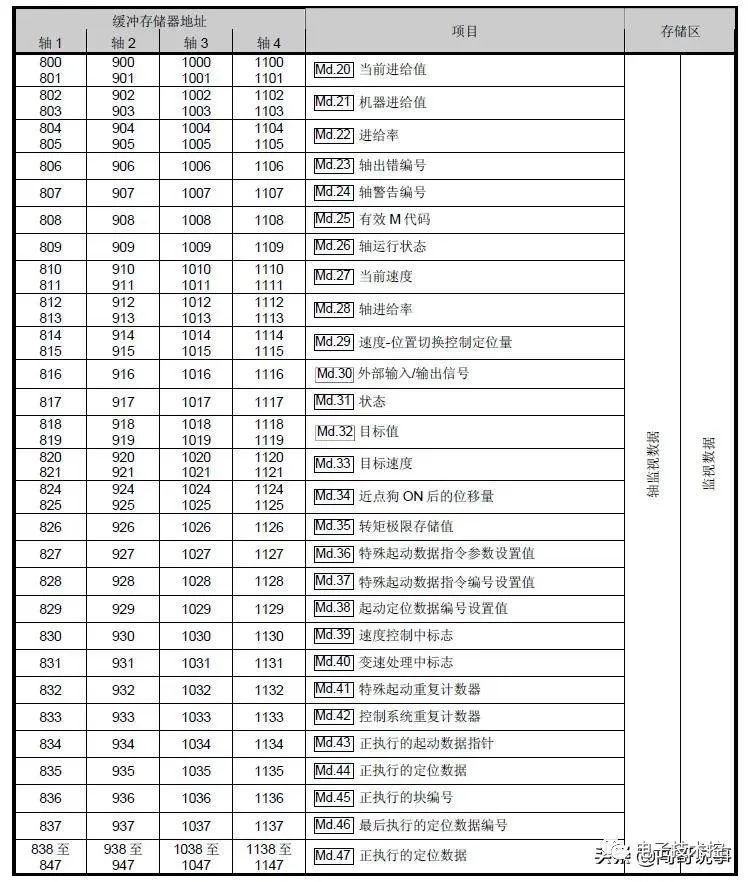
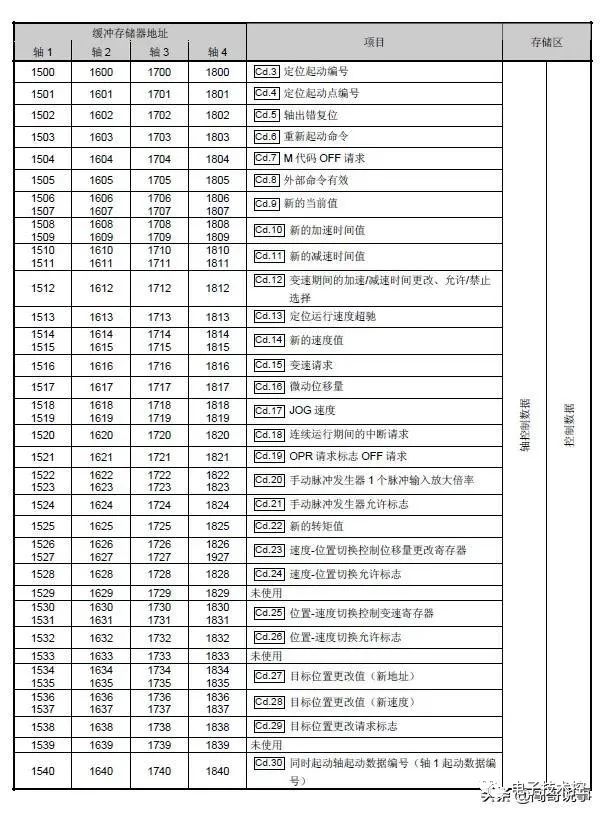
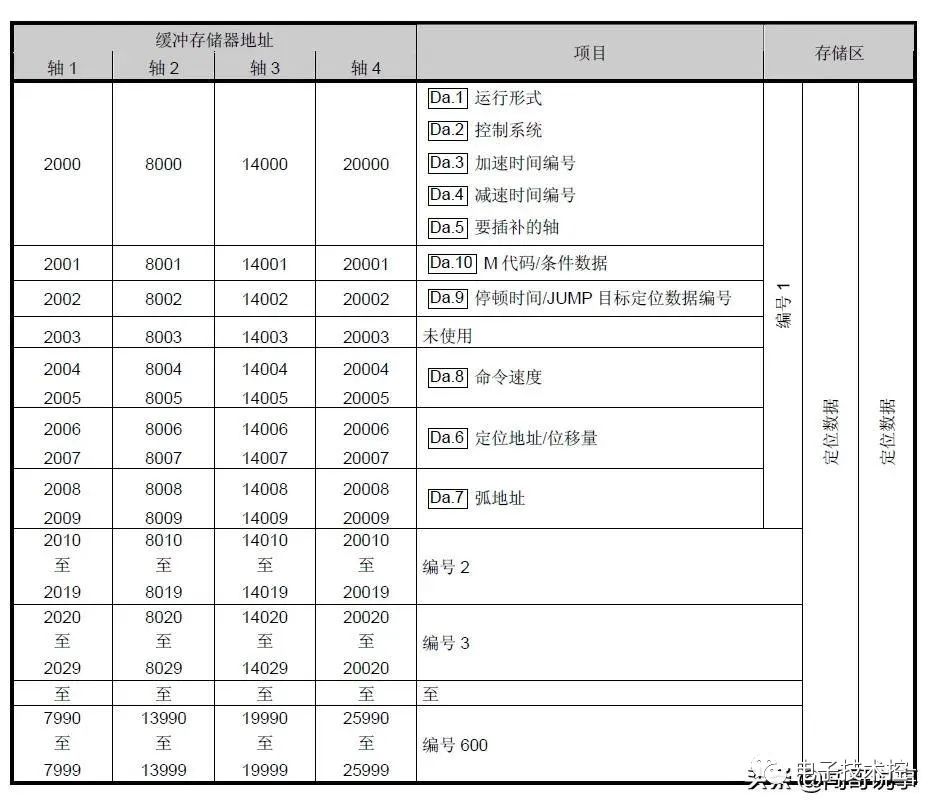
附:缓冲存储器地址分配表