无图的小鹏,同样遥遥领先?
没有高精地图的城市领航辅助驾驶来了!
这周我和白杨在北京参与了小鹏XNGP无高精地图工程版的抢先体验。关于这次体验,我们俩一致认为小鹏这波操作属实非常“遥遥领先”了。

这次的体验路线全程约40KM,无图方案覆盖约30公里。其中包含中关村、南锣鼓巷、望京等北京市地标区域。覆盖了包含复杂大路口、错位路口、虚线区域较短的路口、大坡度视野受限路口、红绿灯位置特殊路口、车道线残损不清晰路段、有图/无图交接路段等场景。
可以看得出,这次无图领航辅助驾驶的试驾,小鹏是诚意满满!当然小鹏也非常坦诚的告诉我们!“没有高精地图,对于智驾来说有点像荒野求生!所有人类司机会犯的错误,系统都有可能会犯。”视频中我们也找了一些比较经典的场景做了展示。大家可以点击视频听听我们的试驾体验。下文中,我们会详细聊一聊关于无图领航辅助驾驶方案的问题,
没有高精地图对小鹏NGP有那些影响?
大家都知道4.3.1版本的NGP是基于高精地图来开发的,无论是感知还是规控打磨的都比较细腻了,不仅消费者的口碑不错,行业内大家还是有目共睹的。那么去掉高精地图的NGP到底少了些什么?
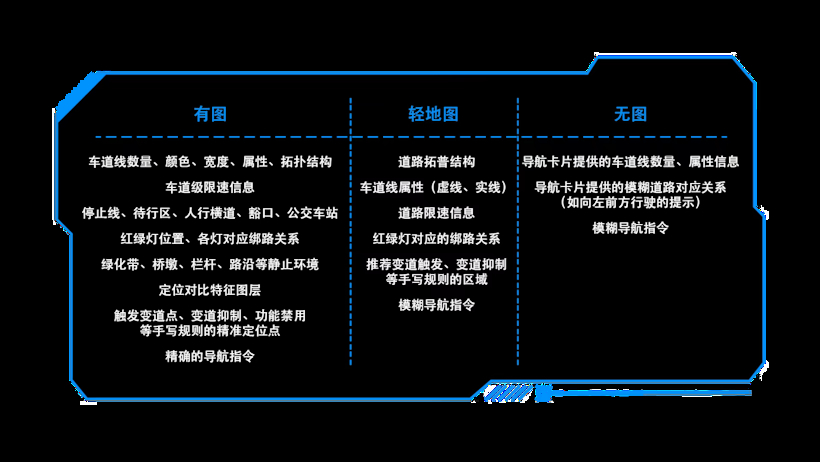
上图中我整理了有高精地图、轻高精地图和无高精地图三种方案中,地图所提供的先验信息内容。无图方案中地图提供的先验信息并不多。基本就只有车道线数量、属性信息、模糊的道路对应关系以及导航指令。
简单点说,路上的车道线颜色、虚实、车道箭头方向等信息,现在都需要依靠感知了确认了,甚至像限速、红绿灯,被遮挡或者超过视线距离的一些道路信息,咱们看不到的,不确定的,现在它也一样。
没有高精地图的小鹏NGP如何工作?

小鹏的无图NGP和有图NGP是同一套技术栈,差别仅仅是把原先高精地图的输入,换成了导航地图的输入及实时感知对导航信息的理解。由于现在的无图方案,无论是对视觉,还是对BEV+Transformer而言,对于车道线感知的精度要求都要更加精确,XNet通过学习大量的道路及路口特征,可以进一步感知复杂的道路结构。工作人员告诉我,XNet的总感知距离差不多有1.8个足球场那么大,大家也可以自行脑补一波。
当然采用同一套架构还有一个好处就是具有更好的兼容性。不管有无高精地图,是在高速还是城区道路,都能够保障智驾体验的连续性。并且效果也是相当不错的,这次我们在北京的体验过程就非常丝滑。
没有高精地图的小鹏NGP到底增加了些什么难度?

缺少了高精地图的先验信息的输入,对系统而言,最棘手的问题我们总结下来大概有三个,主要还是路口的问题,例如:
1.通过错位的路口准确知道对应的车道线?2.复杂大型路口左右转路径选择?3.找到合适的变道时机让系统能在实线前,汇入对应的车道线。
像我们这一次的体验中就遇到了车辆为了汇入正确的车道而压实线的情况,这个场景难度最大,也是目前小鹏出错最多的地方。这次体验的工程版目前还是以能跑通为主,所以路口压实线变道或者短暂骑虚线跑的现象都还存在。
这说明目前小鹏无图版NGP的变道时机还在打磨中,没有高精地图的先验信息,系统如果没看见就不知道实线在哪 ,什么时候该变道,什么时候该抑制变道。这个也是目前我能看到的,小鹏的无图城市领航从工程版走到量产交付,需要去着重解决的问题。
小鹏为什么要做没有高精地图的方案?
首先就是车企们都在说的几个问题。例如:鲜度和泛化能力的问题。大家都知道交通环境是瞬息万变的,想要时刻匹配最准确的数据技术难度非常高,假如遇到路上的临时施工占道、信号灯故障等问题无法及时更新,车辆就很容易出现误判。
余承东就曾在ADS 2.0的发布会上表示过,高精地图覆盖全国的难度太高,中国道路情况复杂,时刻都在变化,只有不依赖高精地图的自动驾驶才有实用价值。这次体验时,小鹏也表示没有高精地图的领航辅助方案的泛化能力会提升约4~10倍。更利于未来智能驾驶的普及。
另外一方面就是成本问题。现在国内具有采图资质资质的图商本就不多,再加上现在我们还采用的是传统的测绘车来采集数据,除了泛化能力受影响之外,也没有达到规模的经济效益,所以价格很贵。按照1000元/公里的价格计算,再有钱的车企都很难接受如此大的长期投入。
当然,小鹏也有自己必须加速开放无图版的原因。对智驾有了解的的伙伴应该都知道,小鹏绝不是第一家做无图领航辅助驾驶方案的车企,除了友商之外,背后还有例如:元戎启行、Momenta等供应商等等,小鹏想要拿回智驾一哥的位置,必须要快、狠、准。
当然智驾一哥宝座肯定没那么容易赢回,有多大赢面还要看实际推送版本的能力、开放的节奏、城市覆盖速度究竟如何了。
写在最后
总而言之,现阶段的无图领航辅助驾驶的开发难度还是非常大的,需要的能力也会更高。但正式迈出无图这一步也意味着小鹏在智能驾驶的路上迈入了新的阶段。估计正式在北京OTA应该不会太晚,年内覆盖50城的计划指日可待。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。