进入2023年国内自动驾驶已经卷城市导航辅助驾驶卷了很长一段时间,然而城市的功能真正体验过的用户我敢说依旧少得可以忽略不计,究其原因,难度指数级增长的城市功能与企业希望线性迭代推出新功能的渴望产生了错配,所以2023年在城市功能还迟迟无法落地实际用户的当下(这里忽略媒体宣传),“通勤模式”似乎是众多车企给出的一份过渡期答卷,用户自己训练自动驾驶系统的概念听起来几乎带有魔力,然而“通勤模式“早不来晚不来,偏偏在城市落地遇阻的当下才姗姗进入人们视野,是天才的灵感乍现,还是“通勤模式”另有隐情,今天就深入解析一下这一突然火起来的概念通勤模式或者叫做记忆行车模式。
1. “通勤模式“横空出世
小鹏作为国内量产自动驾驶走的最快的公司之一,在2023年3月首次提出“通勤模式”的概念,随后大疆6月也提出了基于低成本硬件的“记忆行车模式”,通勤模式这一概念开始进入公众视野。然而“通勤模式”并非解决自动驾驶商业模式困境的天才创新,而是产品设计不得已向技术发展作出的妥协。实际上“通勤模式”或者“记忆行车模式”的想法简单朴素,就是利用限定固定路线以及多次采集数据来限制和简化城市导航辅助驾驶功能,然而虽然是简化,在我看来其技术路径仍旧存在诸多难点,把“通勤模式”当作城市辅助驾驶迟迟难以落地的临时折中方案可能并不像大家想的那样简单。
小鹏首先提出通勤模式的概念以期弥补高精地图未覆盖区域用户的城市辅助驾驶体验
实际上记忆行车仍旧是一种导航辅助驾驶,与目前小鹏,华为等公司依赖高精地图和地理围栏划定ODD区域(功设计开放域)的城市导航辅助驾驶可以说是一体两面,其本质都是在功能开启范围受到技术限制无法达到全域开放的情况下,对功能开启地理位置的一种约束:高精地图地理围栏将ODD区域限制在高精地图覆盖且经过测试,风险可控的地点;而记忆行车则将ODD区域限制在每个用户高频使用的路线上进行所谓熟路模式。
记忆行车和依赖高精地图地理围栏实际上是城市NOA的一体两面,本质都是限制功能开启的地理范围
2. “通勤模式“带来了新的机遇,也带来了新的挑战
我们先来看一下通勤模式的三个潜在优势,可以通过Overfit训练私有模型,可以通过多趟采集构建通勤地图Map,可以通过人类司机示范记忆固定路线导航轨迹Route。
通勤模式模式三种潜在价值
2.1 具体路线私有模型Overfit训练
具体路线小的样本集看似可以通过过拟合(Overfit)模型获得较好的性能,然而实际上这在产品上是几乎不可能实现。以目前的深度学习技术范式来讲,要为成千上万个用户量身定做模型,即使是在统一的大数据集上先训练过再为每个用户针对性finetune通勤路线直到过拟合也是行不通的,毕竟模型版本控制每个用户独有的模型参数是一件几乎不可能完成的MLOps灾难,训练资源也很难支持数以万计的模型训练,是否后续每次模型迭代都要重新进行全部用户的finetune也是模型迭代的巨大挑战。要知道即使是更容易实现,更接近AGI的NLP语言大模型GPT系列也无法为每个用户训练专属模型参数,更不要提模型架构更分散,模型更多元的自动驾驶功能了。因此尽管听上去很性感,很遗憾专属路线过拟合这条路确实非常不切实际的。
2.2 针对性路线上单车多趟建图
高精地图地理围栏一般会将高精地图建图没有覆盖,地图制作有错误,有时效性问题,或者是场景过于复杂,安全风险较大的区域如环岛,掉头,车道线模糊,非机动车行人混行等路段排除在功能覆盖ODD区域之外;通勤模式则通过针对性的建图规避了高精地图没有覆盖的问题,另外通过录制轨迹简化了自动驾驶导航的挑战,但是时效性,复杂场景这些城市导航辅助的难题,通勤模式同样需要解决。
虽然理论上听起来通过反复录制通行路线上的信息来完成针对性建图是很巧妙的解决高精地图没有覆盖的一个好主意,然而通勤模式在地图获取方面本质上是一个单车多趟建图,其优势很可能不如想象来得巨大。原因在于地图采集与用户通勤路线对车辆行驶模式有着非常不一样的要求,地图采集一般要求在动态车流遮挡较少的凌晨或者半夜进行采集,这样可以最大程度避免动态物体对建图的干扰,然而用户通勤通常是在一天中交通流最繁忙的高峰时刻,周围众多车辆动态物体会遮挡场景,导致建图质量急剧下降。
拥堵的交通会导致建图采集的信息非常受限
其次为了弥补采集车传感器视野范围限制,保证采集地图的完整性,会要求地图采集在同一段路反复开多趟,并且遍历所有路口进出车道,而固定通勤路线通常无法覆盖所有车道和路口通行方向,这样建出的地图完整性很难保证,也对依赖于其他路口方向的他车轨迹预测,规划控制等下游模块造成严重影响。
通勤轨迹无法遍历路口各个方向
第三,地理围栏虽然主要为了规避高精地图未覆盖区域,但是它也提供给自动驾驶公司一个应对困难危险场景的有效手段。例如掉头场景侧后方视野不佳,功能执行风险较高,可以用非ODD排除掉;人车混行的道路擦碰风险极高,也可以用非ODD适当规避。然而通勤模式下每个用户通勤路线可能非常多样复杂,从产品设计角度,通勤模式为的是让尽量多的用户都可以使用这个功能,那么就不太可能因为某个用户回家路线经过喧闹市集或者需要掉头就禁止用户使用通勤功能,因此在处理复杂场景的情况下反而增加了导航辅助驾驶的难度和风险。
最后一个原因,在我国现行政策下,地图是高度敏感的地理信息,用户通勤模式进行地图构建则可能有政策风险。
2.3 存储记忆的用户通勤行驶轨迹
相比私有模型overfit的不靠谱以及通勤地图的问题多多,我认为通勤模式能带来的最大的优势其实是来自用户示范的轨迹记忆以及基于记忆轨迹的导航了。
实际上如今除Tesla外的自动驾驶公司很难摆脱对高精地图的依赖最主要的原因还不是因为高精地图在提供感知先验和超视距能力上的优势,甚至不是高精地图在他车和行人VRU等轨迹预测功能上重要作用,更多的是因为没了高精地图就很难将导航路径与具备精确尺寸的超视距地图环境信息结合在一起从而指导路径规划。古希腊神话里忒修斯手持绳索进入迷宫并杀死怪物弥诺陶洛斯后,沿着手里的绳索的引领最终走出了怪物的迷宫。
依赖高精地图导航的自动驾驶车辆就好像牵着通往出口绳索的希腊英雄忒修斯,绳索在就不会迷失
实际上对目前的大多数依赖高精地图的自动驾驶系统来说,基于高精地图的导航信息就像自动驾驶系统手里握着的一条通往目的地的绳索,自动驾驶车规划轨迹只能在感知到局部障碍物时选择临时偏离导航路径轨迹对障碍物进行避让,避让后必须尽快回到对导航路径的跟踪上来,一旦偏离导航轨迹太多,就需要依赖高精地图实时重新规划导航路径。而没有了高精地图的最大问题就是导航路径这条绳索无处附着,所以想去掉对高精地图的依赖就好像要扔掉绳索找迷宫的出口一样,非常困难。
记忆的轨迹路径在没有高精地图的前提下从另一个角度解决了导航轨迹的问题,因为有着之前录制的轨迹就好像直接给车子这样一条完整的绳索,保持对这条录制轨迹的追踪就能确保自动驾驶规控不会迷失方向,只需要在实时根据感知规划出沿着记忆路径并绕开动态障碍物的路线就能带用户到达终点。
3. “通勤模式”技术实现的一种设想
“通勤模式“作为一个新的概念,产业界没有足够的成功案例参考,同时由于通勤模式本质是产品设计对技术的妥协,创新性不足,学术界也研究的不多,所以实现“通勤模式”的技术方案尚不明朗。根据上面的分析,我个人认为“通勤模式”应该以重记忆轨迹的运用为主,以通勤地图建图为辅的原则来设计系统实现。 “通勤模式”技术方案的核心是最大程度利用好记忆轨迹,记忆的轨迹是一组全局坐标下的经纬度姿态组成的点串,同时记忆轨迹还应包含在轨迹不同位置自车驾驶的动作信息以及他车和周围环境的信息等。 并不是让车辆简单追踪轨迹就能完成通勤导航驾驶,我们人类开车是跟其他交通参与者协作进行的,驾驶必须遵守一套既定的交通规则,除了利用定位和控制算法让自车尽量沿着导航路径行驶之外,我们还需要确定车道的位置,避免压线行驶,以及侵占他车路线,还要确定道路允许的行驶方向,避免左转道直行等等。由于没有了高精地图提供这一系列语义信息,通勤模式的关键就是要我们把录制的有偏差的轨迹从全局坐标系上根据实时感知到的周围环境转化到自车感知的局部坐标系上,也就是把global的route转换成local的route,这样借助自车实时感知来区分可行驶区域,车道线等道路元素信息,再结合local坐标系下的导航轨迹,便可以支持规控进行轨迹追踪。如何将导航轨迹从global转到local既可以基于传统的导航绑路规则进行,也可以以定位位置,导航轨迹为输入,利用模型直接联合输出与静态道路元素融合一起的导航路径轨迹。
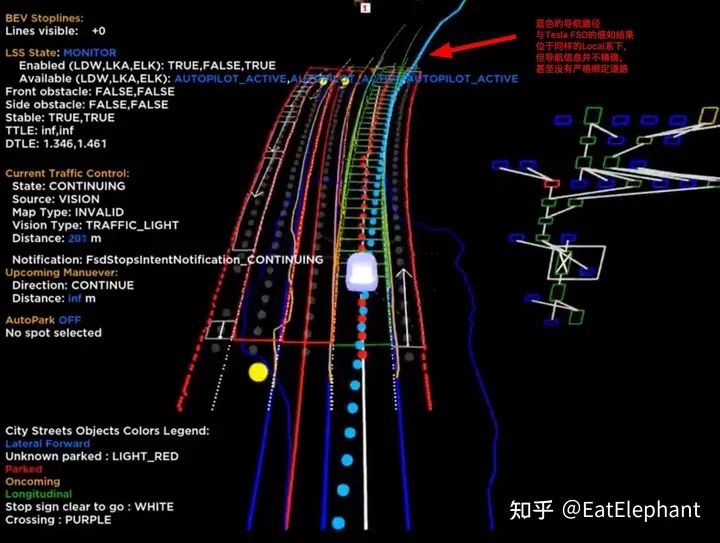
Tesla FSD的导航信息与感知同在Local坐标系下,但是并不精确,也没有严格绑定车道 最后针对用户通勤路线,利用单车多趟数据还可以一定程度辅助解决困难场景,例如红绿灯检测和关联在高精地图先验缺失的情况下十分困难,但是凭借多趟采集可以帮助算法定位红绿灯大致位置,从而在实时指导检测算法。另外由于实时感知和通勤地图都无法保证视野完整性,因此通勤模式需要一定的不确定性来辅助规控进行行为决策,例如轨迹中某段有刹车,那么这里有交通灯,停止线的概率就很大,某处轨迹行驶缓慢,则可能这里交通状况复杂,需要小心规划轨迹。 这样有了记忆轨迹这条导航绳索,多趟记忆信息又帮助解决了一些复杂场景感知挑战,最后系统只要沿着这条与实时感知对齐的Local坐标系的导航轨迹对实时交通状况进行响应,允许部分偏离导航,但必须尽快回到导航路径上来,就可以沿着记忆路径完成驾驶。 注意系统设计虽然可行,但是这途中仍旧需要强大的感知能力,这样才能在人类驾驶员示范时尽可能生成相对完整的通勤地图,同时能够应对通勤驾驶途中的各种突发意外情况,合理的根据导航路径与感知车道线的绑定关系选择变道/绕行等操作。
4. 总结
“通勤模式“引发热切关注原因在于很多人认为通勤模式是解决高等级城市辅助驾驶落地范围受限的一条捷径,同时随着通勤地图的积累,通勤路线的过拟合,通勤模式会比城市导航辅助驾驶体验更好,更高效安全,而一旦这样体验大大提升的覆盖了大多数用户高比例驾驶场景的功能落地,自动驾驶普及必然能进一大步,这样自动驾驶商业化进步也必将伴随而来。可是实际上通勤模式存在自己独有的挑战,而城市导航辅助驾驶真正的难题通勤模式也未必能避开,所以可能自动驾驶的大成没有捷径,长期修炼提高技术能力最终解决全域功能开启也许才是更直接,更本质的目标。