基于simulink的永磁同步电机数学建模仿真设计
模型搭建背景
三相永磁同步电机(PMSM)是目前被广泛应用的一种电机,电机本体也是一个强耦合、复杂的非线性系统,matlab电力模块库中已经包含了各种电机本体模型,但是为了能够更好地设计先进的PMSM控制算法,了解电机中各个量的关系,有必要建立一个数学模型。同时,在仿真中,有时候可能会存在有些工况下要求电机具备变参数功能,如果能够自己搭建一个数学模型,这样就可以根据需求更改相关的参数,使用上更加灵活。
目前,根据永磁体转子上的位置不同,三相 PMSM的转子结构可以分为表贴式和内置式两种结构,对于表贴式转子结构而言,由于其具有结构简单、制造成本低和转动惯量小等优点,在恒功率运行范围不宽的三相PMSM和永磁无刷直流电机中得到广泛应用。表贴式转子结构中的永磁磁极易于实现最优设计,能使电机的气隙磁密波形趋于正弦波分布,进而提高电机的运行性能。内置式转子结构可以充分利用转子磁路不对称所产生的磁阻转矩,提高电机的功率密度,使得电机的动态性能较表贴式转子结构有所改善,制造工艺也较简单,但漏磁系数和制造成本都较表贴式转子结构大。
永磁同步电机数学模型
根据坐标系的不同,常见的永磁同步电机电机数学模型可分为基于abc三相自然坐标系下的模型,基于α—β静止坐标系模型以及基于d—q旋转坐标系模型。abc坐标不需要坐标变换,但方程相对复杂,变量较多,耦合度较高计算较为复杂,abc坐标系转换到α—β坐标系统后,模型参数仍存在随时间变化的问题,这些参数的变化使得控制系统设计变得复杂,因此,为了便于后期控制器的设计,通常选择同步旋转坐标系d—q坐标系下的数学模型进行电机模型的建模。
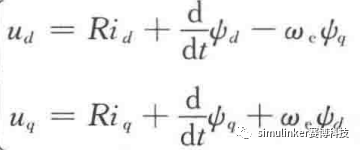
永磁同步电机的数学模型一般可以用如下四个方程进行描述,分别是定子电压方程、定子磁链方程、电磁转矩方程,以及机械运动方程。各方程公式如下:
定子电压方程:
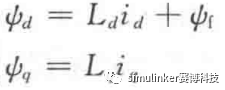
定子磁链方程:
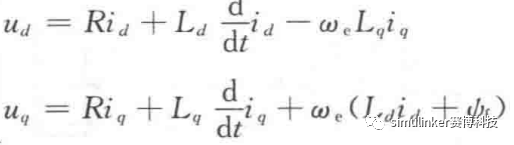
将定子磁链方程带入定子电压方程可得:

** 电磁转矩方程:**

其中,p为极对数, 为永磁体磁链
为永磁体磁链
机械运动方程:
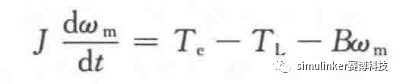
其中,wm为电机的机械角速度;J为转动惯量;B为阻尼系数;TL为负载转矩。
通过上述四个电机的公式,即可完成完整的永磁同步电机数学模型的搭建。
仿真模型
基于上述公式可搭建永磁同步电机数学模型如下:
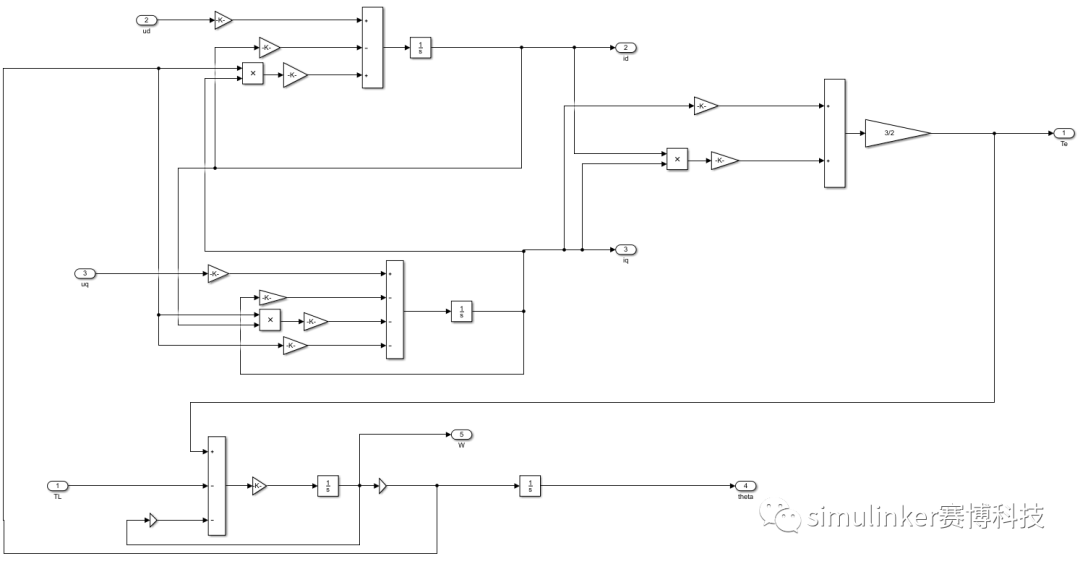
图1 永磁同步电机数学模型
参照matlab自带模块库模型,可将模型进行简单封装,得到基于负载转矩(TL)输入的模型和基于电机电角速度(w,rad/s)输入的模型,其中ud,uq为电机接入点三相电压经dq变换后的信号。由于基于电角速度输入的模型省去了机械运动方程部分,相比基于负载转矩的模型简单,运行时更容易稳定。
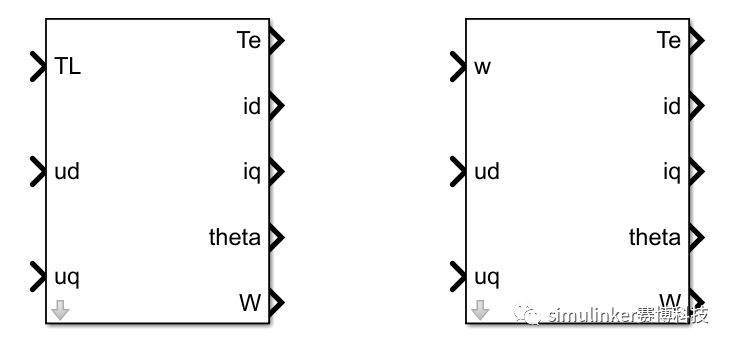
图2 永磁同步电机数学模型封装
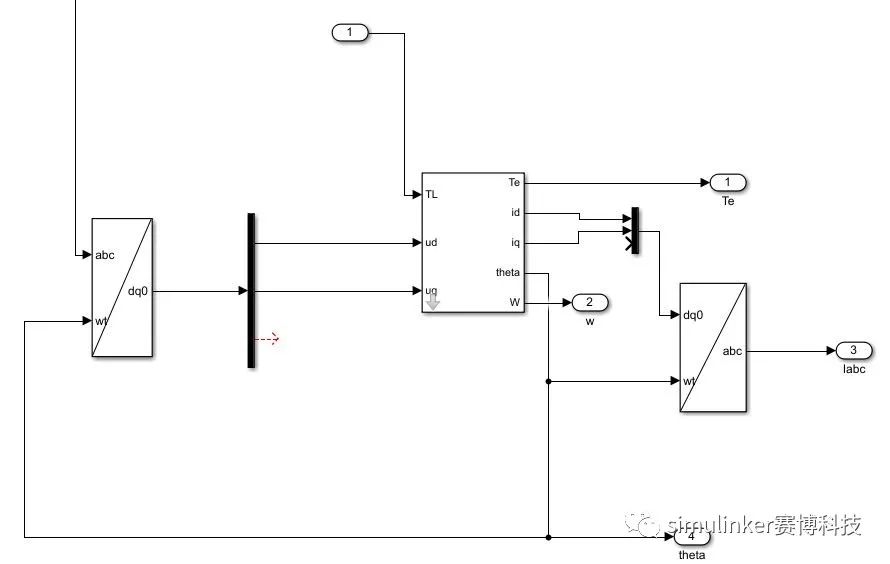
图3 永磁同步电机数学模型封装内部
仿真结果验证
(1)为验证本文所搭建的模型的正确性,搭建电路结构及参数完全相同的简单电路模型,并给定完全相同的负载转矩,进行测试。
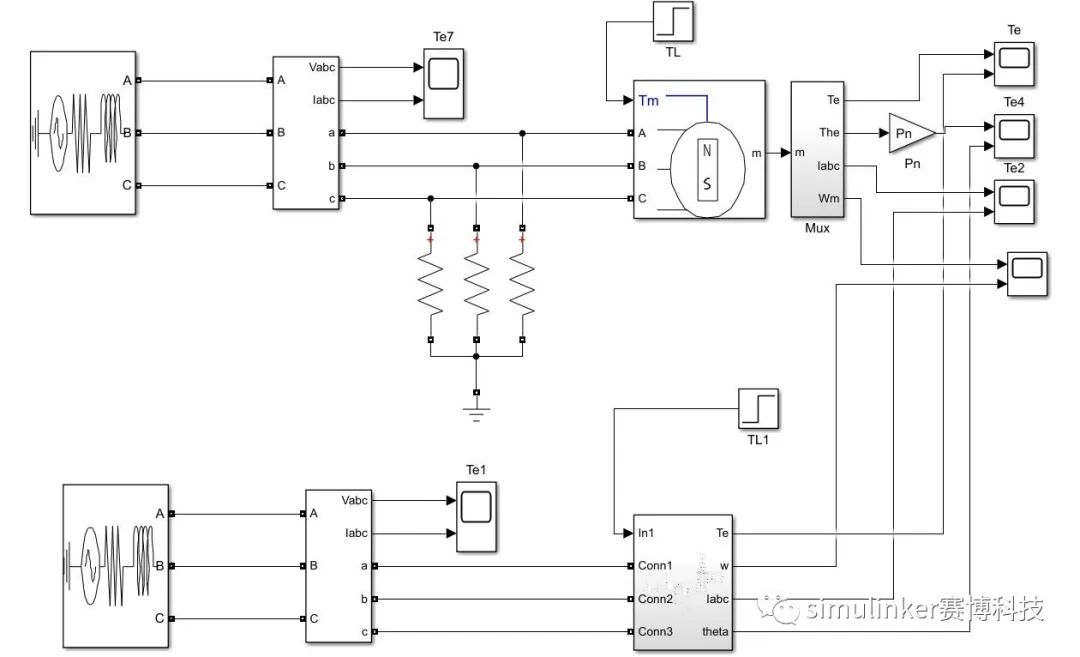
图4 对比测试模型
运行仿真结果如下:
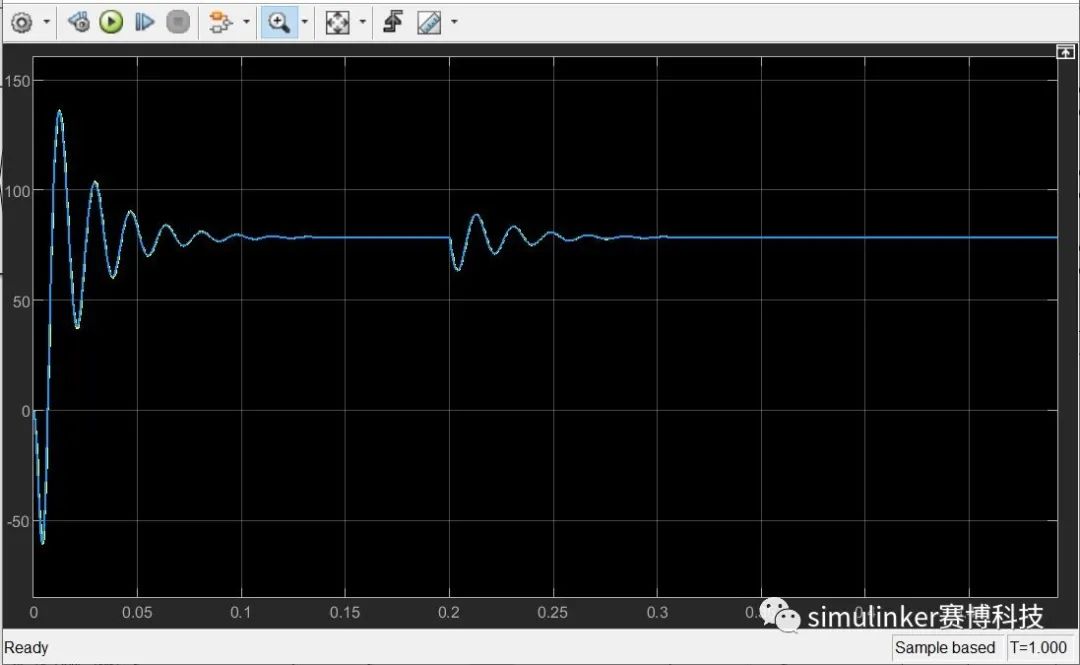
图5 电机输出角速度(rad/s)
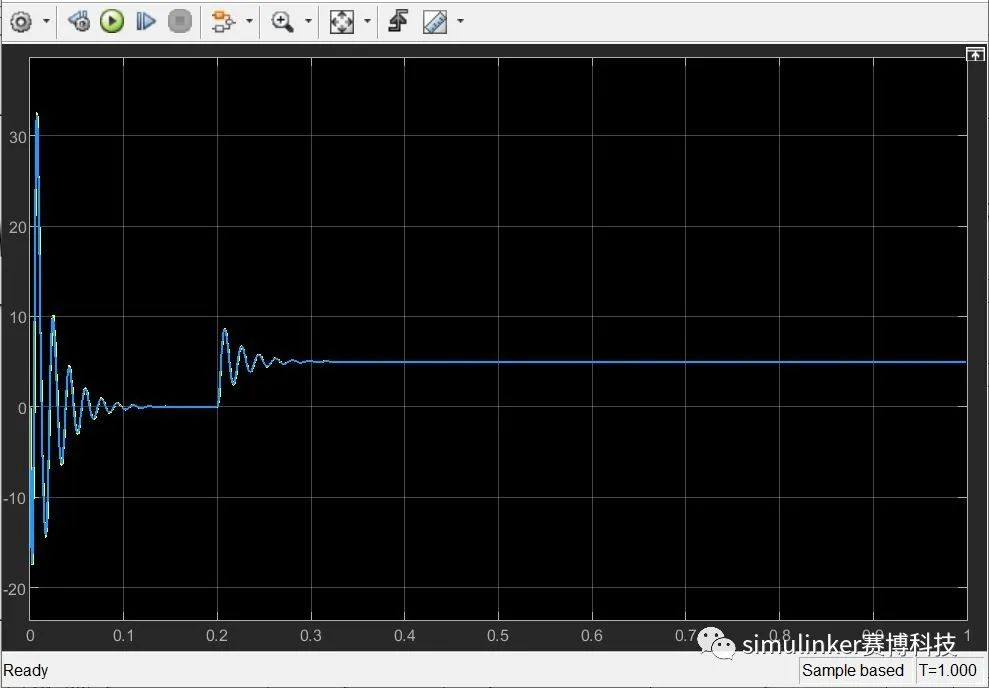
图6 电机转矩波形
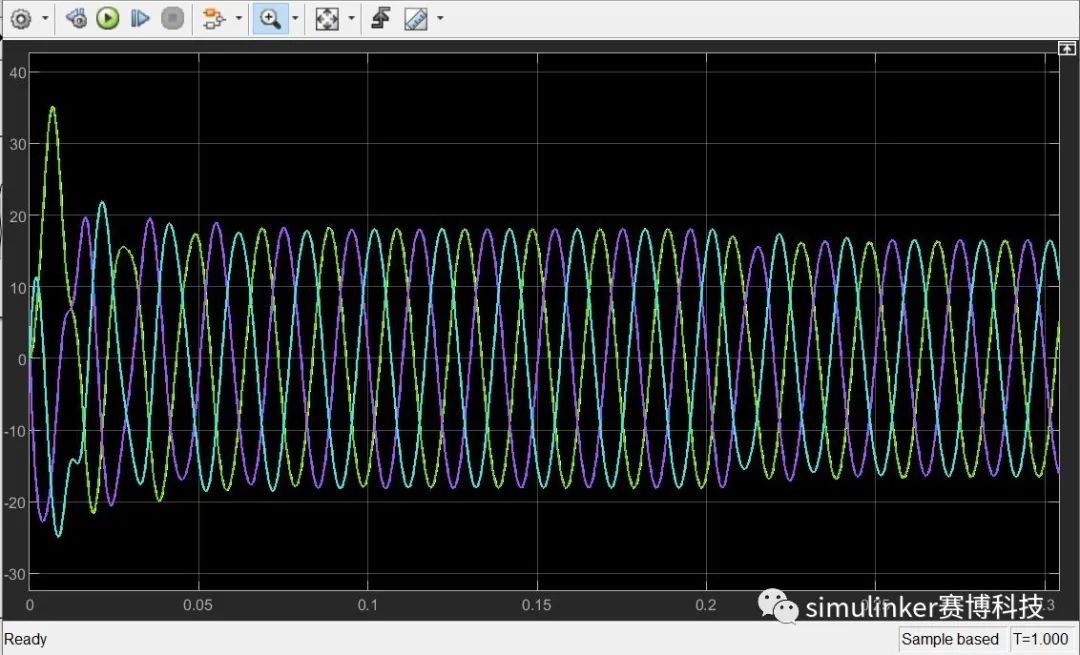
图7 电机电流波形
(2)为进一步验证本文所搭建的电机本体模型,搭建电路结构及参数完全相同的基于FOC控制的永磁同步电机调速控制仿真模型,并给定完全相同的负载转矩及转速指令,进行测试。
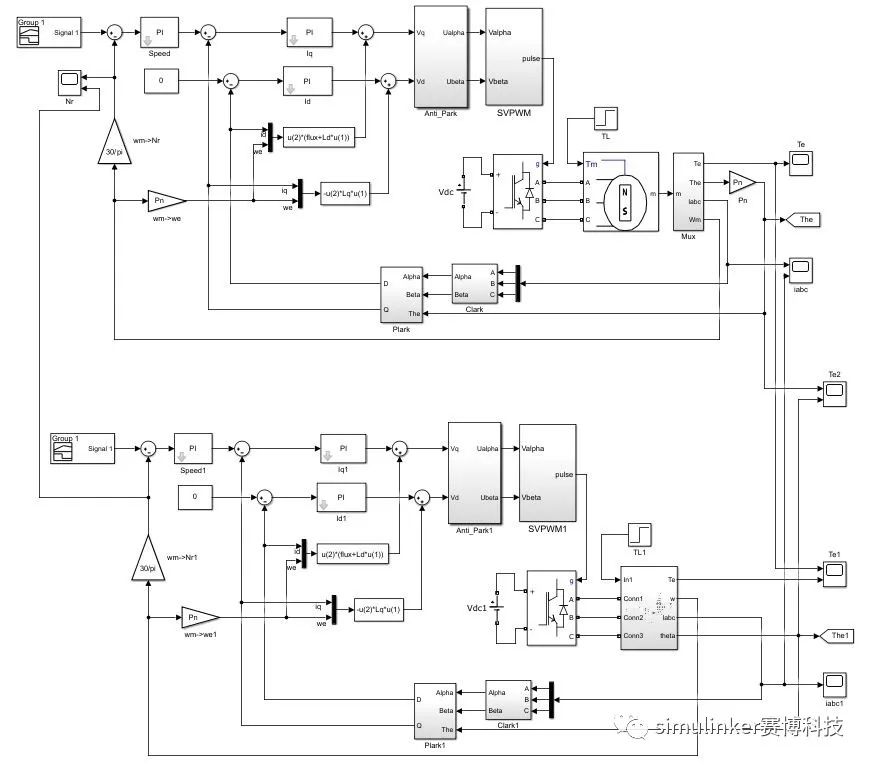
图8 电机调速对比测试模型
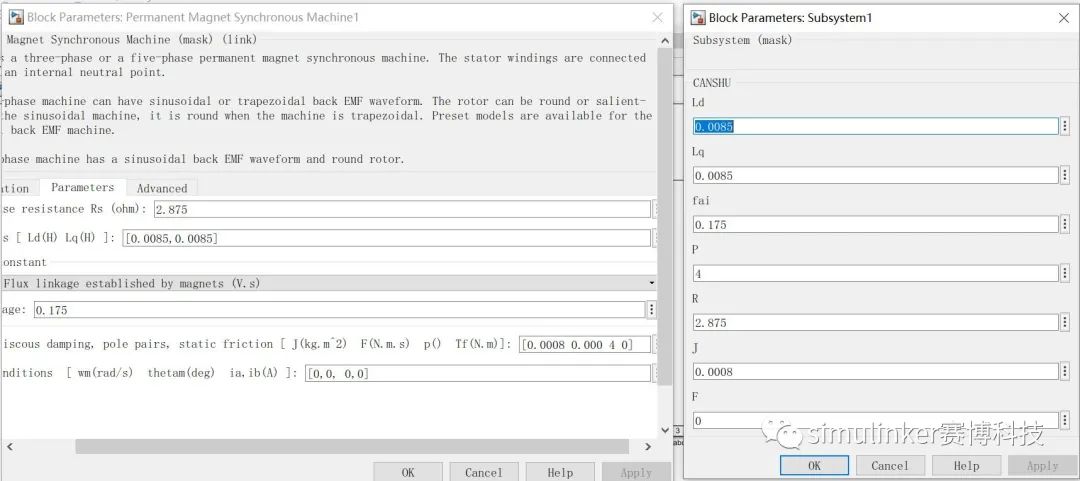
图9 电机参数对比
运行仿真结果如下:
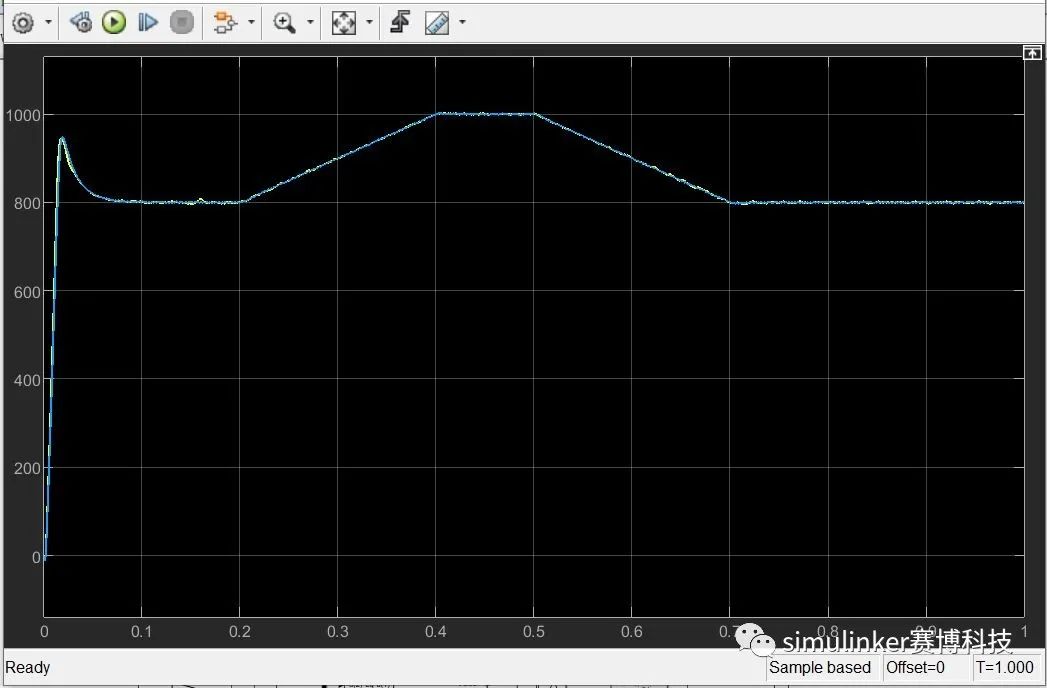
图10 电机转速波形(r/min)
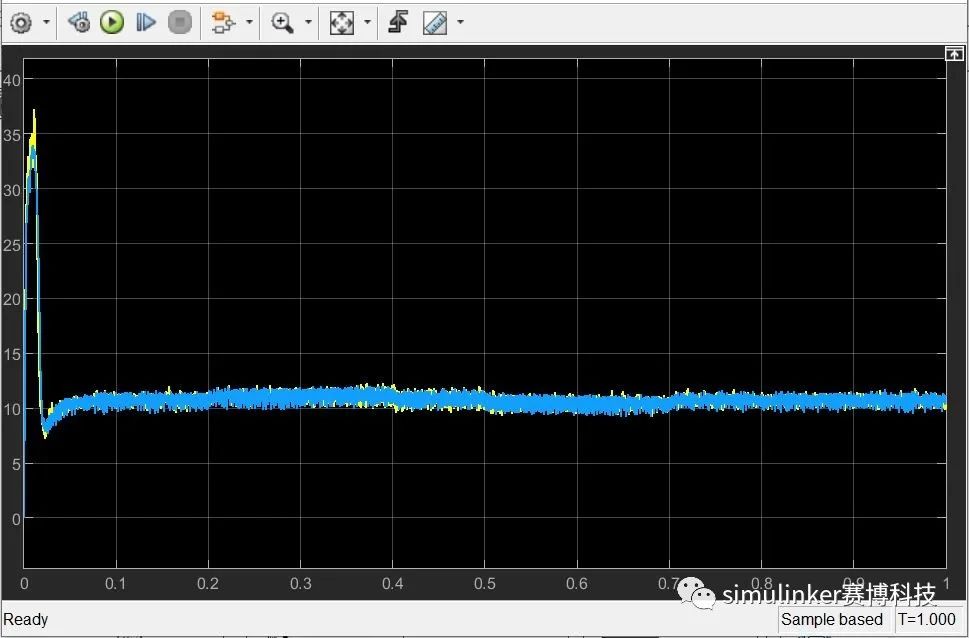
图11 电机转矩波形
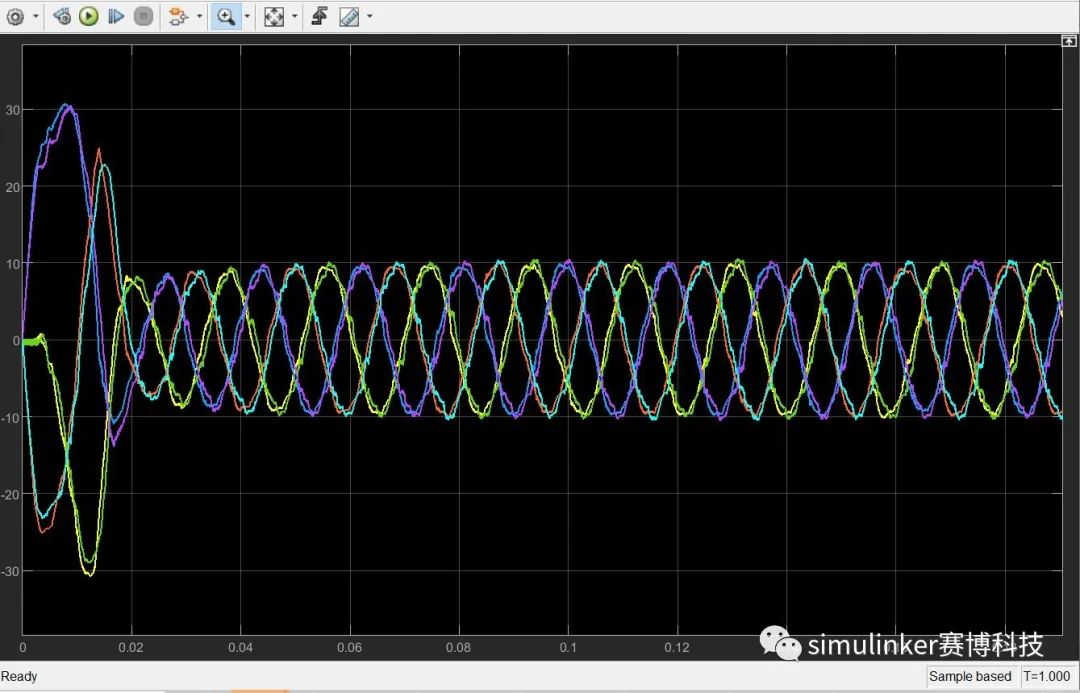
图12 电机电流波形
通过上述仿真结果可以看出,在相同电路拓扑及输入给定的情况下,搭建的永磁同步电机数学模型仿真结果波形与matlab自带的电机模型仿真结果几乎完全重合,验证了模型的正确性。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。