汽车传感器MIPI CSI-2和PHY传输和接收模块设计
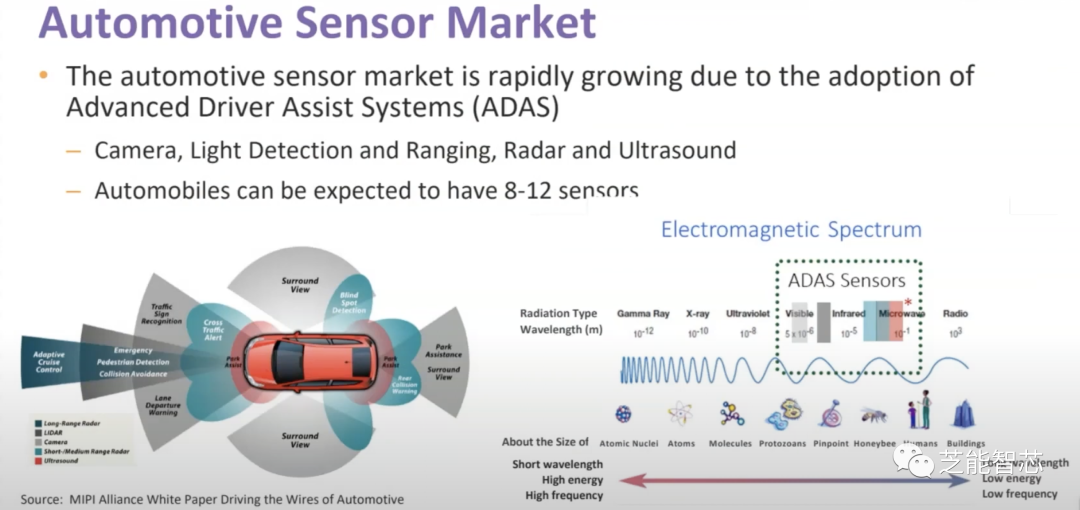
传感器、这些传感器输出的ML推断结果是自动辅助驾驶的重要核心。Mixel和Rambus在MIPI DevCon上就这种传输技术MIPI进行了讲解,涉及了来自Rambus的摄像头串行接口(MIPI CSI-2)和来自Mixel的物理接口(MIPI C-PHY和MIPI D-PHY)
MIPI CSI-2和PHY传输和接收模块
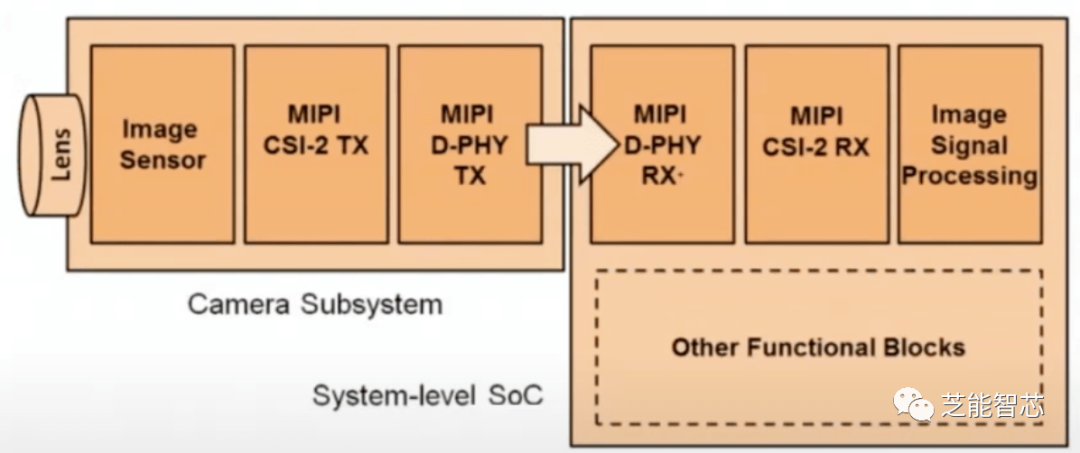
MIPI CSI-2是定义摄像头和ISP(图像信号处理器)之间串行接口的功能。像素从一端流入,最终从另一端流出,所以该接口需要一个发送功能和一个接收功能。由于这些功能必须能够连接任何摄像头(或多个摄像头)到任何ISP,需要很大的灵活性,比如传感器和最终消费者之间的带宽匹配,允许例如连续的流式传输。
在CSI-2的发送和接收功能之间,D-PHY(或C-PHY)负责物理通信。D-PHY使用差分信号,而C-PHY则使用巧妙的差分技术,配合编码,支持更高的数据传输速率。这些技术虽然复杂,但显然支持比D-PHY更高的数据速率。
PHY的安全性
这些IP是为汽车应用设计的,因此安全性是一个关键目标。PHY和控制器都必须满足ISO 26262标准中适当ASIL级别的FMEDA要求。此外,安全关键的汽车应用需要对MIPI PHY进行系统内可测试性。我看到类似的系统内可测试性要求在其他PHY中变得越来越普遍,特别是在ASIL-C/D级别,所以这并不奇怪。Mixel的MIPI PHY支持通用配置(Tx+Rx)的全速和系统内环回测试,以及其自己的区域优化的仅发送和仅接收配置,分别被称为TX+和RX+。
Mixel还指出了汽车IP需要额外的测试:应力测试、HTOL(高温、高压、恶劣环境下的电老化)和可靠性测试(如老化测试)。这些测试,再加上符合ISO 26262标准的DFMEA(失效模式与影响分析)和FMEDA(故障模式、影响和诊断分析),确保了IP的整体可靠性,这对于汽车安全在15年以上的服务寿命中至关重要。
CSI-2控制器中的安全性
为了满足ASIL-B级别的故障覆盖要求,Rambus的CSI-2控制器核心采用了内置自测(BIST)机制。在这里,BIST机制与熟悉的安全缓解技术一起使用:ECC(错误检测和校正码)、CRC(循环冗余校验)、奇偶校验等。有趣的是,这里的BIST是在IP级别进行的,而不是在系统级别。
在NoC中看到的是,在系统内测试中也采用了相同的原则。在这两种情况下,主张的观点是,与系统级别BIST相比,功能级别的BIST在多个方面更好。它可以更深入地测试,并提供对安全覆盖范围更有信心。即使系统级别没有提供BIST,也是可用的,如果系统变得不可操作,可以提供中央反馈。
在安全缓解技术方面,CSI-2控制器对像素和像素缓冲区提供了奇偶校验保护。此外,协议头使用ECC进行保护,数据包使用CRC进行保护。这些技术为数据格式化、打包逻辑、关键状态机和其他关键模块提供了冗余。还会检查数据包的顺序,并标志顺序错误。
安全关键应用中看到的另一个有趣检查是看门狗定时器,用于检测操作是否被冻结或过度延迟。所有这些都强调了在高ASIL级别下,安全缓解不再只是基本方法。设计者正在增加更多主动和复杂的测试和缓解措施,以适应ASIL-C/D级别的要求。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。