CAN总线
CAN 是Controller Area Network
的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。在汽车产业中,出于对安全性、舒适性、方便性、低功耗、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。
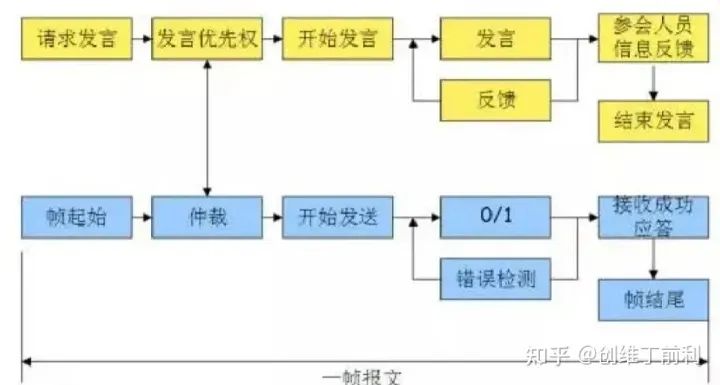
总结下,当一个节点要向其它节点发送数据时,该节点的CPU将要发送的数据和自己的标识符传送给本节点的CAN芯片,并处于准备状态;当它收到总线分配时,转为发送报文状态。CAN 芯片将数据根据协议组织成一定的报文格式发出,这时, 网上的其它节点处于接收状态。每个处于接收状态的节点对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。
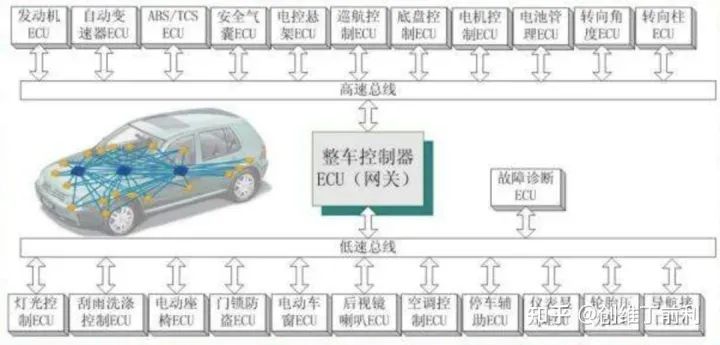
CAN总线结构图CAN总线的优点很多:通信速率最高可达1MB/s(此时距离最长40m)。节点数实际可达110个。采用短帧结构,每一帧的有效字节数为8个。每帧信息都有CRC校验及其他检错措施,数据出错率极低。通信介质可采用双绞线,同轴电缆和光导纤维,一般采用廉价的双绞线即可,无特殊要求。节点在错误严重的情况下,具有自动关闭总线的功能,切断它与总线的联系,以使总线上的其他操作不受影响。