串口通信的原理
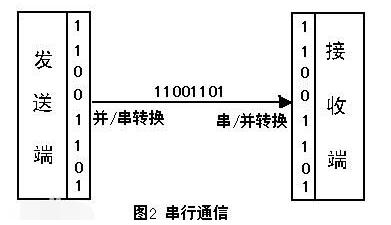
串口通信(SerialCommunications)的概念非常简单,串口按位(bit)发送和接收字节。尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。它很简单并且能够实现远距离通信。比如IEEE488定义并行通行状态时,规定设备线总长不得超过20米,并且任意两个设备间的长度不得超过2米;而对于串口而言,长度可达1200米。典型地,串口用于ASCII码字符的传输。通信使用3根线完成,分别是地线、发送、接收。由于串口通信是异步的,端口能够在一根线上发送数据同时在另一根线上接收数据。其他线用于握手,但不是必须的。串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。对于两个进行通信的端口,这些参数必须匹配。
a,波特率:这是一个衡量符号传输速率的参数。指的是信号被调制以后在单位时间内的变化,即单位时间内载波参数变化的次数,如每秒钟传送240个字符,而每个字符格式包含10位(1个起始位,1个停止位,8个数据位),这时的波特率为240Bd,比特率为10位*240个/秒=2400bps。一般调制速率大于波特率,比如曼彻斯特编码)。通常电话线的波特率为14400,28800和36600。波特率可以远远大于这些值,但是波特率和距离成反比。高波特率常常用于放置的很近的仪器间的通信,典型的例子就是GPIB设备的通信。
b,数据位:这是衡量通信中实际数据位的参数。当计算机发送一个信息包,实际的数据往往不会是8位的,标准的值是6、7和8位。如何设置取决于你想传送的信息。比如,标准的ASCII码是0~127(7位)。扩展的ASCII码是0~255(8位)。如果数据使用简单的文本(标准ASCII码),那么每个数据包使用7位数据。每个包是指一个字节,包括开始/停止位,数据位和奇偶校验位。由于实际数据位取决于通信协议的选取,术语“包”指任何通信的情况。
c,停止位:用于表示单个包的最后一位。典型的值为1,1.5和2位。由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步的容忍程度越大,但是数据传输率同时也越慢。
d,奇偶校验位:在串口通信中一种简单的检错方式。有四种检错方式:偶、奇、高和低。当然没有校验位也是可以的。对于偶和奇校验的情况,串口会设置校验位(数据位后面的一位),用一个值确保传输的数据有偶个或者奇个逻辑高位。例如,如果数据是011,那么对于偶校验,校验位为0,保证逻辑高的位数是偶数个。如果是奇校验,校验位为1,这样就有3个逻辑高位。高位和低位不真正的检查数据,简单置位逻辑高或者逻辑低校验。这样使得接收设备能够知道一个位的状态,有机会判断是否有噪声干扰了通信或者是否传输和接收数据是否不同步。
RS232概述
在我们电脑上,一般都会有一个9针的串行接口,这个串行接口叫做RS232接口,它和UART通信有关联,但是由于现在笔记本电脑不带9针串口,所以和单片机通信越来越趋于使用USB虚拟串口。
九针串口分工头和母头
公头上5下4,上5从左到右为1.2.3.4.5;下4从左到右为6.7.8.9;
母头上5下4,上5从左到右为5.4.3.2.1;下4从左到右为9.8.7.6;
RS232接口一共有9个引脚,分别定义是:1、载波检测DCD;2、接收数据RXD;3、发送数据TXD;4、数据终端准备好DTR;5、信号地线SG;6、数据准备好DSR;7、请求发送RTS;8、清除发送CTS;9、振铃提示RI。我们要让这个串口和我们单片机进行通信,我们只需要关心其中的2脚RXD、3脚TXD和5脚GND即可
虽然这三个引脚的名字和我们单片机上的串口名字一样,但是却不能直接和单片机对连通信,这是为什么呢?随着我们了解的内容越来越多,我们得慢慢知道,不是所有的电路都是5V代表高电平而0V代表低电平的。对于RS232标准来说,它是个反逻辑,也叫做负逻辑。为何叫负逻辑?它的TXD和RXD的电压,-3V~-15V电压代表是1,+3~+15V电压代表是0。低电平代表的是1,而高电平代表的是0,所以称之为负逻辑。因此电脑的9针RS232串口是不能和单片机直接连接的,需要用一个电平转换芯片MAX232来完成
这个芯片就可以实现把标准RS232串口电平转换成我们单片机能够识别和承受的UART0V/5V电平。从这里大家似乎慢慢有点明白了,其实RS232串口和UART串口,它们的协议类型是一样的,只是电平标准不同而已,而MAX232这个芯片起到的就是中间人的作用,它把UART电平转换成RS232电平,也把RS232电平转换成UART电平,从而实现标准RS232接口和单片机UART之间的通信连接。
USB转串口通信
随着技术的发展,工业上还有RS232串口通信的大量使用,但是商业技术的应用上,已经慢慢的使用USB转UART技术取代了RS232串口,绝大多数笔记本电脑已经没有串口这个东西了,那我们要实现单片机和电脑之间的通信该怎么办呢?
们只需要在电路上添加一个USB转串口芯片,就可以成功实现USB通信协议和标准UART串行通信协议的转换,在我们的开发板上,我们使用的是CH340T这个芯片
我们需要用跳线帽把中间和下边的针短接在一起。右侧的CH340T这个电路很简单,把电源、晶振接好后,6脚和7脚的DP和DM分别接USB口的2个数据引脚上去,3脚和4脚通过跳线接到了我们单片机的TXD和RXD上去。
CH340T的电路里3脚位置加了个4148的二极管,是一个小技巧。因为STC89C52这个单片机下载程序时需要冷启动,就是先点下载后上电,上电瞬间单片机会先检测需要不需要下载程序。虽然单片机的VCC是由开关来控制,但是由于CH340T的3脚是输出引脚,如果没有此二极管,开关后级单片机在断电的情况下,CH340T的3脚和单片机的P3.0(即RXD)引脚连在一起,有电流会通过这个引脚流入后级电路并且给后级的电容充电,造成后级有一定幅度的电压,这个电压值虽然只有两三伏左右,但是可能会影响到正常的冷启动。加了二极管后,一方面不影响通信,另外一个方面还可以消除这种不良影响。这个地方可以暂时作为了解,大家如果自己做这类电路,可以参考一下。
IO口模拟UART串口通信
UART串口波特率,常用的值是300、600、1200、2400、4800、9600、14400、19200、28800、38400、57600、115200等速率。IO口模拟UART串行通信程序是一个简单的演示程序,我们使用串口调试助手下发一个数据,数据加1后,再自动返回。
串口调试助手,这里我们直接使用STC-ISP软件自带的串口调试助手,先把串口调试助手的使用给大家说一下,如图11-6所示。第一步要选择串口助手菜单,第二步选择十六进制显示,第三步选择十六进制发送,第四步选择COM口,这个COM口要和自己电脑设备管理器里的那个COM口一致,波特率按我们程序设定好的选择,我们程序中让一个数据位持续时间是1/9600秒,那这个地方选择波特率就是选9600,校验位选N,数据位8,停止位1。
串口调试助手的实质就是利用电脑上的UART通信接口,发送数据给我们的单片机,也可以把我们的单片机发送的数据接收到这个调试助手界面上。
因为初次接触通信方面的技术,所以我把后面的IO模拟串口通信程序进行一下解释,大家可以边看我的解释边看程序,把底层原理先彻底弄懂。
变量定义部分就不用说了,直接看main主函数。首先是对通信的波特率的设定,在这里我们配置的波特率是9600,那么串口调试助手也得是9600。配置波特率的时候,我们用的是定时器T0的模式2。模式2中,不再是TH0代表高8位,TL0代表低8位了,而只有TL0在进行计数,当TL0溢出后,不仅仅会让TF0变1,而且还会将TH0中的内容重新自动装到TL0中。这样有一个好处,就是我们可以把想要的定时器初值提前存在TH0中,当TL0溢出后,TH0自动把初值就重新送入TL0了,全自动的,不需要程序中再给TL0重新赋值了,配置方式很简单,大家可以自己看下程序并且计算一下初值。
波特率设置好以后,打开中断,然后等待接收串口调试助手下发的数据。接收数据的时候,首先要进行低电平检测while(PIN_RXD),若没有低电平则说明没有数据,一旦检测到低电平,就进入启动接收函数StartRXD()。接收函数最开始启动半个波特率周期,初学可能这里不是很明白。大家回头看一下我们的图11-2里边的串口数据示意图,如果在数据位电平变化的时候去读取,因为时序上的误差以及信号稳定性的问题很容易读错数据,所以我们希望在信号最稳定的时候去读数据。除了信号变化的那个沿的位置外,其它位置都很稳定,那么我们现在就约定在信号中间位置去读取电平状态,这样能够保证我们读的一定是正确的。
一旦读到了起始信号,我们就把当前状态设定成接收状态,并且打开定时器中断,第一次是半个周期进入中断后,对起始位进行二次判断一下,确认一下起始位是低电平,而不是一个干扰信号。以后每经过1/9600秒进入一次中断,并且把这个引脚的状态读到RxdBuf里边。等待接收完毕之后,我们再把这个RxdBuf加1,再通过TXD引脚发送出去,同样需要先发一位起始位,然后发8个数据位,再发结束位,发送完毕后,程序运行到while(PIN_RXD),等待第二轮信号接收的开始。
uart模块介绍
IO口模拟串口通信,让大家了解了串口通信的本质,但是我们的单片机程序却需要不停的检测扫描单片机IO口收到的数据,大量占用了单片机的运行时间。这时候就会有聪明人想了,其实我们并不是很关心通信的过程,我们只需要一个通信的结果,最终得到接收到的数据就行了。这样我们可以在单片机内部做一个硬件模块,让它自动接收数据,接收完了,通知我们一下就可以了,我们的51单片机内部就存在这样一个UART模块,要正确使用它,当然还得先把对应的特殊功能寄存器配置好。
51单片机的UART串口的结构由串行口控制寄存器SCON、发送和接收电路三部分构成,先来了解一下串口控制寄存器SCON。
SCON串行控制器的位分配(地址:0x98)
位:符号:复位值: 0:RI:0;1:TI:0;2:RB8:0;3:TB8:0;4:REN:0;5:SM2:0;6:SM1:0;7:SM0:0;
0位RI:接收中断标志位,当接收电路接收到停止位的中间位置时,RI由硬件置1,必须通过软件清零
1位TI:发送中断标志位,当发送电路发送到停止位的中间位置时,TI由硬件置1,必须通过软件清零。
2位RB8:模式2和3中接收到的第9位数据(很少用),模式1用来接收停止位。
3位TB8:模式2和3中要发送的第9位数据(很少用)。
4位REN:使能串行接收。由软件置位使能接收,软件清零则禁止接收。
5位SM2:多机通信控制位(极少用),模式1直接清零。
6位SM1和7位SM0:
这两位共同决定了串口通信的模式0~模式3共4种模式。我们最常用的就是模式1,也就是SM0=0,SM1=1,下边我们重点就讲模式1,其它模式从略。
对于串口的四种模式,模式1是最常用的,就是我们前边提到的1位起始位,8位数据位和1位停止位。下面我们就详细介绍模式1的工作细节和使用方法,至于其它3种模式与此也是大同小异,真正遇到需要使用的时候大家再去查阅相关资料就行了。
在我们使用IO口模拟串口通信的时候,串口的波特率是使用定时器T0的中断体现出来的。在硬件串口模块中,有一个专门的波特率发生器用来控制发送和接收数据的速度。对于STC89C52单片机来讲,这个波特率发生器只能由定时器T1或定时器T2产生,而不能由定时器T0产生,这和我们模拟的通信是完全不同的概念。
如果用定时器2,需要配置额外的寄存器,默认是使用定时器1的,我们本章内容主要就使用定时器T1作为波特率发生器来讲解,方式1下的波特率发生器必须使用定时器T1的模式2,也就是自动重装载模式,定时器的重载值计算公式为:
TH1 = TL1 = 256 - 晶振值/12 /2/16 /波特率
和波特率有关的还有一个寄存器,是一个电源管理寄存器PCON,他的最高位可以把波特率提高一倍,也就是如果写PCON |= 0x80以后,计算公式就成了:
TH1 = TL1 = 256 - 晶振值/12 /16 /波特率
公式中数字的含义这里解释一下,256是8位定时器的溢出值,也就是TL1的溢出值,晶振值在我们的开发板上就是11059200,12是说1个机器周期等于12个时钟周期,值得关注的是这个16,我们来重点说明。在IO口模拟串口通信接收数据的时候,采集的是这一位数据的中间位置,而实际上串口模块比我们模拟的要复杂和精确一些。他采取的方式是把一位信号采集16次,其中第7、8、9次取出来,这三次中其中两次如果是高电平,那么就认定这一位数据是1,如果两次是低电平,那么就认定这一位是0,这样一旦受到意外干扰读错一次数据,也依然可以保证最终数据的正确性。
串口通信的发送和接收电路在物理上有2个名字相同的SBUF寄存器,它们的地址也都是0x99,但是一个用来做发送缓冲,一个用来做接收缓冲。意思就是说,有2个房间,两个房间的门牌号是一样的,其中一个只出人不进人,另外一个只进人不出人,这样的话,我们就可以实现UART的全双工通信,相互之间不会产生干扰。但是在逻辑上呢,我们每次只操作SBUF,单片机会自动根据对它执行的是“读”还是“写”操作来选择是接收SBUF还是发送SBUF,后边通过程序,我们就会彻底了解这个问题。
UART串口程序:
一般情况下,我们编写串口通信程序的基本步骤如下所示:
1、配置串口为模式1。
2、配置定时器T1为模式2,即自动重装模式。
3、根据波特率计算TH1和TL1的初值,如果有需要可以使用PCON进行波特率加倍。
4、打开定时器控制寄存器TR1,让定时器跑起来。
这里还要特别注意一下,就是在使用T1做波特率发生器的时候,千万不要再使能T1的中断了。
我们先来看一下由IO口模拟串口通信直接改为使用硬件UART模块时的程序代码,看看程序是不是简单了很多,因为大部分的工作硬件模块都替我们做了。程序功能和IO口模拟的是完全一样的。
通信实例与ASCLL码
先抛开我们使用的汉字不谈,那么我们常用的字符就包含了0~9的数字、A~Z/a~z的字母、还有各种标点符号等。那么在单片机系统里面我们怎么来表示它们呢?ASCII码(AmericanStandardCodeforInformationInterchange,即美国信息互换标准代码)可以完成这个使命:我们知道,在单片机中一个字节的数据可以有0~255共256个值,我们取其中的0~127共128个值赋予了它另外一层涵义
我们用字符格式发送一个小写的a,返回一个十六进制的0x61,数码管上显示的也是61,ASCII码表里字符a对应十进制是97,等于十六进制的0x61;我们再用字符格式发送一个数字1,返回一个十六进制的0x31,数码管上显示的也是31,ASCII表里字符1对应的十进制是49,等于十六进制的0x31。这下大家就该清楚了:所谓的十六进制发送和十六进制接收,都是按字节数据的真实值进行的;而字符格式发送和字符格式接收,是按ASCII码表中字符形式进行的,但它实际上最终传输的还是一个字节数据。这个表格,当然不需要大家去记住,理解它,用的时候过来查就行了。
51单片机串口通信实例(字符串接收和发送)
#include《reg52.h》
//------------------串口通信协议-----------------//
/*
客户端数据包格式解释(长度恒为15):
例如:A01_fmq_01Off___#
A--------数据包的开始标记(可以为A到Z,意味着数据包可以有26种)
01-----设备代号
fmq_01Off___--------指令(长度恒为10),指令的前4个人字符是指令头部,指令的后6个字符是指令尾部
#---------数据包的结束标记
服务器端数据包格式解释(长度恒为15):
例如:A02_SenT010250#
A--------数据包的开始标记(可以为A到Z,意味着数据包可以有26种)
02-----设备代号
SenT010250--------指令(长度恒为10),指令的前4个人字符是指令头部,指令的后6个字符是指令尾部
#---------数据包的结束标记
*/
char buf_string[16]; //定义数据包长度为15个字符
#define deviceID_1Bit ‘0’ //用于串口通信时,定义本地设备ID的第1位
#define deviceID_2Bit ‘2’ //用于串口通信时,定义本地设备ID的第2位
#define datapackage_headflag ‘A’ //用于串口通信时,定义数据包头部的验证标记
char DataPackage_DS18B20[16]={datapackage_headflag,deviceID_1Bit,deviceID_2Bit,‘_’,‘S’,‘e’,‘n’,‘T’,‘X’,‘X’,‘X’,‘X’,‘X’,‘X’,‘#’};
char HeartBeat[16]={datapackage_headflag,deviceID_1Bit,deviceID_2Bit,‘_’,‘B’,‘e’,‘a’,‘t’,‘X’,‘X’,‘X’,‘X’,‘X’,‘X’,‘#’};
//----------------------------------------------//
/*******************************
串口通信
MCU:89C52RC 11.0592MHz
//11.0592MHz 0xd0 1200bps
//12MHz 0xcc 1200bps
//11.0592MHz 0xfa 9600bps
//0xf4 11.0592MHz 0xf3 12MHz 4800bps
//均在SMOD=1的情况下(波特率倍增模式)
*******************************/
//串口发送函数
void PutString(unsigned char *TXStr)
{
ES=0;
while(*TXStr!=0)
{
SBUF=*TXStr;
while(TI==0);
TI=0;
TXStr++;
}
ES=1;
}
//串口接收函数
bit ReceiveString()
{
char * RecStr=buf_string;
char num=0;
unsigned char count=0;
loop:
*RecStr=SBUF;
count=0;
RI=0;
if(num《14) //数据包长度为15个字符,尝试连续接收15个字符
{
num++;
RecStr++;
while(!RI)
{
count++;
if(count》130)return 0; //接收数据等待延迟,等待时间太久会导致CPU运算闲置,太短会出现“数据包被分割”,默认count=130
}
goto loop;
}
return 1;
}
//定时器1用作波特率发生器
void Init_USART()
{
SCON=0x50; //串口方式1,使能接收
TMOD|=0x20; //定时器1工作方式2(8位自动重装初值)
TMOD&=~0x10;
TH1=0xfa; //9600bps
TL1=0xfa;
PCON|=0x80; //SMOD=1
TR1=1;
TI=0;
RI=0;
//PS=1; //提高串口中断优先级
ES=1; //开启串口中断使能
}
//比较指令头部
bit CompareCMD_head(char CMD_head[])
{
unsigned char CharNum;
for(CharNum=0;CharNum《4;CharNum++) //指令长度为10个字符
{
if(!(buf_string[CharNum+4]==CMD_head[CharNum]))
{
return 0; //指令头部匹配失败
}
}
return 1; //指令头部匹配成功
}
//比较指令尾部(start:从哪里开始比较,quality:比较多少个字符,CMD_tail[]:要比较的字符串)
bit CompareCMD_tail(unsigned char start,unsigned char quality,char CMD_tail[])
{
unsigned char CharNum;
for(CharNum=0;CharNum《quality;CharNum++)
{
if(!(buf_string[start+CharNum]==CMD_tail[CharNum]))
{
return 0;
}
}
return 1;
}
bit Deal_UART_RecData() //处理串口接收数据包函数(成功处理数据包则返回1,否则返回0)
{
//PutString(buf_string);
if(buf_string[0]==datapackage_headflag&&buf_string[14]==‘#’) //进行数据包头尾标记验证
{
switch(buf_string[1]) //识别发送者设备ID的第1位数字
{
case ‘0’:
switch(buf_string[2]) //识别发送者设备ID的第2位数字
{
case ‘3’:
if(CompareCMD_head(“Ligt”)) //判断指令头部是否为“Ligt”
{
//下面是指令尾部分析
switch(buf_string[8])
{
case ‘0’:
switch(buf_string[9])
{
case ‘0’:
return 0;
case ‘1’:
if(CompareCMD_tail(10,3,“Off”)) //A03_Ligt01Off_#
{
//要执行的代码
return 1;
}
if(CompareCMD_tail(10,3,“On_”))
{
return 1;
}
return 0;
default:
return 0;
}
case ‘1’:
default:
return 0;
}
}
if(CompareCMD_head(“SenT”))
{
}
if(CompareCMD_head(“jdq_”))
{
}
if(CompareCMD_head(“Try!”))
{
}
return 0;
default:
return 0;
}
default:
return 0;
}
}
return 0;
}
/************************
中断函数
************************/
//串口中断服务函数-----------
void USART() interrupt 4 //标志位TI和RI需要手动复位,TI和RI置位共用一个中断入口
{
if(ReceiveString())
{
//数据包长度正确则执行以下代码
Deal_UART_RecData();
}
else
{
//数据包长度错误则执行以下代码
//LED1=~LED1;
}
RI=0; //接收并处理一次数据后把接收中断标志清除一下,拒绝响应在中断接收忙的时候发来的请求