1. 定时器中断简介
STM32的定时器功能十分强大,有高级定时器(TIM1和TIM8)、通用定时器(TIM2~TIM5)和基本定时器(TIM6和TIM7);本实验主要介绍难度适中的通用定时器,通用定时器是一个通过可编程预分频器驱动的16位自动装载计数器构成。 它适用于多种场合,包括测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和PWM)。 使用定时器预分频器和RCC时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。 每个定时器都是完全独立的,没有互相共享任何资源。
通用TIMx (TIM2、TIM3、TIM4和TIM5)定时器功能包括:
16位向上、向下、向上/向下自动装载计数器
16位可编程(可以实时修改)预分频器,计数器时钟频率的分频系数为1~65536之间的任意数值
4个独立通道: ─ 输入捕获 ─ 输出比较 ─ PWM生成(边缘或中间对齐模式) ─ 单脉冲模式输出
使用外部信号控制定时器和定时器互连的同步电路
如下事件发生时产生中断/DMA:
-- 更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发)
-- 触发事件(计数器启动、停止、初始化或者由内部/外部触发计数)
-- 输入捕获
-- 输出比较
支持针对定位的增量(正交)编码器和霍尔传感器电路
触发输入作为外部时钟或者按周期的电流管理
通用定时器框图
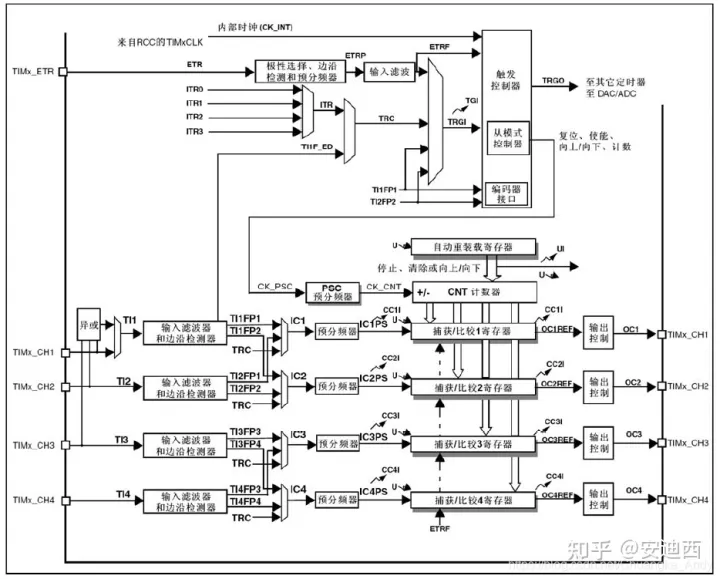
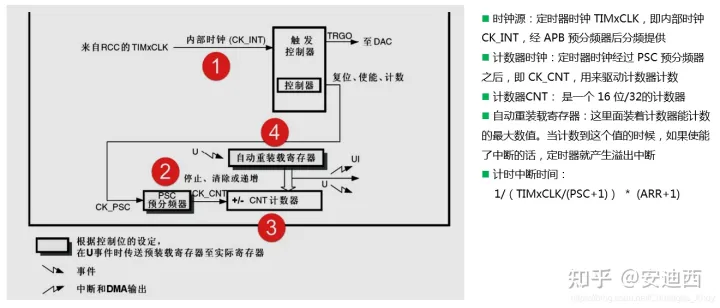
定时器时基部分
2. 硬件设计
本实验通过TIM3的中断来控制D1的亮灭,需要用到的硬件资源
D1和D2指示灯
定时器TIM3

3. 软件设计
3.1 STM32CubeMX设置
RCC设置外接HSE,时钟设置为72MHz;TIM3的时钟挂载在APB1 Time Clocks上为72MHz
PC0/PC1设置为GPIO推挽输出模式、上拉、高速、默认输出电平为高电平
激活TIM3定时器,时钟源选择为内部时钟,PSC预分频设置为7200-1,向上计数,自动重装载值(ARR)设置为10000-1,在NVIC设置中激活TIM3定时器中断;根据公式可算出:计数器时钟CK_CNT = 72M/7200 = 10000Hz,计时器中断时间为 ARR/10000 = 1s

输入工程名,选择工程路径(不要有中文),选择MDK-ARM V5;勾选Generated periphera initialization as a pair of ‘.c/.h’ files per IP ;点击GENERATE CODE,生成工程代码
3.2 MDK-ARM编程
在tim.c文件中可以看到定时器的初始化函数
void MX_TIM3_Init(void){
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim3.Instance = TIM3;
htim3.Init.Prescaler = 7200-1;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 10000-1;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK){
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK){
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK){
Error_Handler();
}
}
找到弱符号周期运行回调函数原型,并在tim.c中自定义该回调函数 __weak void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
if(htim == &htim3){
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_0); //LED1状态每1s翻转一次
}
}
在main函数中编写相关代码,在while中使LED2每500ms翻转一次
int main(void){
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim3); //启动定时器中断模式计数
/* USER CODE END 2 */
while (1){
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_1); //LED2状态每500ms翻转一次
HAL_Delay(500);
}
}
4. 下载验证
编译无误后下载到开发板,可以看到LED1每1s状态翻转一次,LED2每500ms状态翻转一次