2023 将会是智驾功能体验跨越式升级的一年,多项硬核新技术都将在兔年兔飞猛进,迎来落地。今天 Autolab 联合睿思齐智能汽车咨询,和大家一起展望一下 2023 年的 5 大智驾新体验!
BEV 带来的高速 NOA 优化
BEV 模型是这几年智驾领域的热门话题,相较于传统的主干网络,BEV 不仅能够融合激光雷达、毫米波雷达、视觉摄像头信息,实现多模态感知结果的前融合,还能在 BEV 视角下将不同角度的相机、甚至不同时间的画面进行 融合。

对我们车主而言,这项技术带来的体验优化也是非常明显的,这种体验优化将会最先体验在高速 NOA 领航辅助驾驶功能上。总结来说会有以下几个方面:
减少了无效变道次数,提升了整体通行效率。我们使用 NOA 的时候觉得最不智能的点,在于无效变道,明明变道过去会遇到缓行大卡车,系统还是变过去,然后就被困在大卡车后面,一顿操作猛如虎,原地踏步净添堵。BEV 上车后能够有效解决这个问题,通过时序融合提前规避这样的“陷阱”,即便是被遮挡的大车,也能通过预 测算法还原出真实道路环境,做出更聪明的决策。
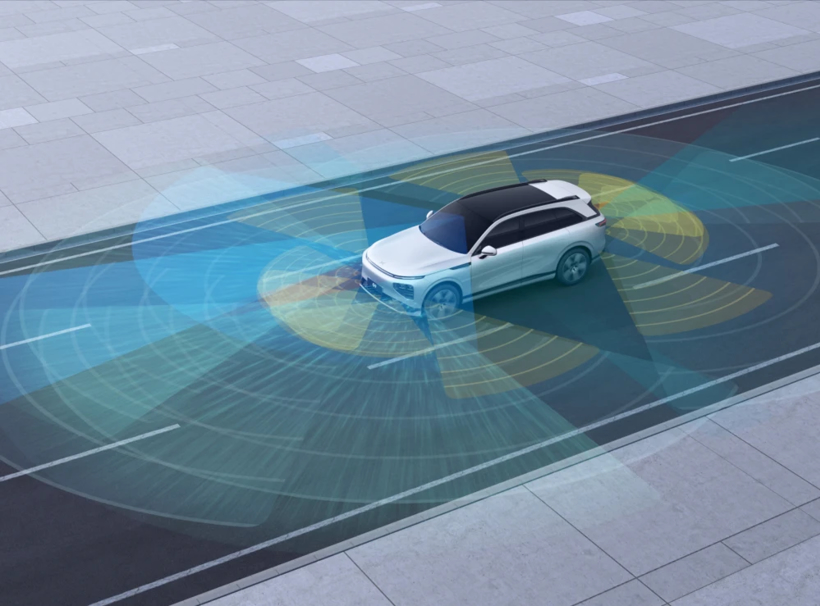
提升了感知精度。通过多个传感器的信息融合,车辆能够更快更准确地判断出道路环境,及时做出响应。例如 高速上经常出现的 “贴身别车”,特别是大卡车的别车,在 BEV 下能一定程度的优化,系统表现会更安全一些。
决策更拟人。就如同用第三视角玩赛车游戏一样,BEV 对相对空间下的认知更充分,也就能做出更拟人的决策,让车辆的控制更柔和更接近老司机,乘坐体验更舒适。

代表车型:蔚来ES7/ET7/ET5、小鹏G9、极狐阿尔法 S 全新 HI 版、阿维塔 11、魏牌摩卡 DHT-PHEV 激光雷达版等。
行泊一体带来的整体体验优化
行泊一体是一个工程的术语,一开始主要指的是把行车、泊车的域控制器放在一块板子,或者把两个功能共用同一个域控制器,但是现在“行泊一体”已经不单单指这种物理结构上的变化,而是指能够把两个功能打通,共用传感器和算力,开发出体验更好的智驾功能。
2023 年也会有诸多车企开始推出行泊一体的车型,行车和泊车的体验都会提升,简单来说主要有以下几种:
变道体验更好。以前鱼眼摄像头都是只用在泊车过程,打通“任督二脉”后,鱼眼恰好能为车辆提供侧后侧前的中近距离感知,配合前面提到的 BEV,能让车辆获得更精确的变道空间。反应在体感上就是变道更拟人了,例如能够在合适的时机,加速变道,提升变道的效率和成功率。
泊车的可用性大幅提升。以前泊车获得的资源很有限,算力不够,感知精度也不够,带来的结果就是几乎没有车能提供好的泊车体验。现在泊车能用更大的算力,甚至可以用前向激光雷达来识别车位,提升识别效率。从体验上来说,系统可以更快地识别到车位,甚至可以在后台同步探测车位,让你挂了 R 档,车就自己停进 去。基于行泊一体,也能更方便地实现 记忆泊车等功能,自动帮你找车位。
代表车型:小鹏 G9、极狐阿尔法 S全新 HI 版、阿维塔 11 等

城市领航辅助驾驶
城市领航辅助驾驶功能就不多赘述啦,简单来说就是你在车机上设置了导航,开启辅助驾驶之后,系统就能按照导航路线自动开过去,中途可以自己“红灯停绿灯行”,还能自己选择对应的车道线,遇到慢车或者障碍车能够变道绕过去。
2022 年已经有两款车实现城市领航辅助驾驶功能,分别是小鹏 P5 在广州落地的 CNGP,以及极狐阿尔法 S 全新 HI版在深圳和上海推送的城市 NCA。
2023 年小鹏CNGP 还会拓展到上海、深圳等几座有高精地图覆盖的城市,此外小鹏 G9 以及即将亮相的新版小鹏 P7 也会实现城市领航辅助驾驶功能。

华为 ADS 的城市 NCA 明年也将会拓展到阿维塔 11 以及极狐的后续新车上,甚至传闻已久的 AITO 问界 M9 也会搭载华为 ADS 提供的城市 NCA 功能。此外,城市 NCA 在 2023 年会逐步覆盖开放杭州、北京(五环外)等城市。
除了目前已有的玩家外,由毫末智行开发的城市 NOH 也会在 2023 年正式推送给车主,推送后 WEY 牌摩卡 DHT-PHEV 激光雷达版将具备城市领航辅助驾驶功能。

目前毫末城市 NOH 首批会开放保定、北京等城市,由于采取“轻地图,重感知”路线,城市 NOH 不受高精地图影响,理论上可以在任何城市落地。按照毫末此前宣布的规划,2023 年毫末 HON 将直接在 10 座城市落地。
今天分享的三项新技术新体验,你对哪一项最感兴趣呢?欢迎在留言区和我们互动!









