软件BUG频出 驾驶辅助系统可靠性遭质疑
近日,一位理想L8车主在网络上发布消息称,自己夜晚驾车时突然发现车辆感知系统提示后方有人追车,检查后确认车后并没有人。事后,理想汽车官方回应称出现该情况是因为理想L8 Pro(AD Pro平台4.2版本)视觉感知算法存在BUG,由于事发当晚下着小雨,系统误将雨滴识别成了行人。虽然只是虚惊一场,但此事一出,还是引发了舆论对于驾驶辅助系统可靠性的热议。
BUG频出、投诉持续高企 驾驶辅助技术仍不完善
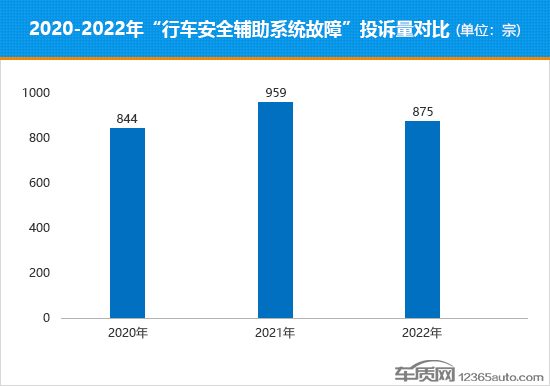
智能汽车已经成为全球汽车产业发展的战略方向,作为核心技术之一的驾驶辅助技术也迎来了飞速发展。不过,受限于政策法规的制约,当前汽车自动驾驶水平普遍仍处在L2阶段,也称为L2级辅助驾驶,即车辆实现部分的自动化,距离完全自动驾驶还有很长一段距离。与此同时,随着驾驶辅助技术市场渗透率逐渐提升,暴露出的问题也越来越多。据车质网数据显示,2020-2022年,“行车安全辅助系统故障”投诉量始终居高不下,已经成为除“影音系统故障”和“车载互联故障”外,投诉量排名第三位的汽车智能网联类问题。

事实上,类似于理想L8这类视觉感知系统的问题并非个例,类似的问题同样在其他车型上出现过。2021年,有国外特斯拉车主在社交平台上发视频称,自己驾驶特斯拉路过无人墓地时,中控屏上显示感应到了很多人影。而在国内也有不少特斯拉车主称遇到了类似的情况。
所幸理想L8车主只是被莫名出现的人影吓了一跳,但试想一下,如果在高速行驶中,这个人影出现在了车头,或者在倒车时出现在了车尾,导致系统产生误判而执行紧急刹车,那后果就不堪设想了,对于车主的人身安全会构成严重威胁。然而,即便此类问题已经有了前车之鉴,但透过理想L8事件来看,理想官方对于此类问题显然并未能予以足够的重视。
软件算法“背锅”,驾驶辅助技术仍需不断优化
作为L2级驾驶辅助迈向高阶自动驾驶的关键一步,软件算法起到了至关重要的作用。软件算法可以分为感知算法、融合算法、决策算法和执行算法。当前车企普遍使用的感知算法是将传感器数据转换成车辆所处场景的机器语言,包括物体检测、识别和跟踪、3D环境建模、物体的运动估计等。无论是此前的特斯拉Autopolit误判还是近期的理想L8系统BUG,都是因为感知算法出现了问题,进而影响到系统识别的准确性。

因此,如何改进算法来提高障碍物检测准确性和复杂场景下的决策能力,将成为下一阶段驾驶辅助技术的研发重点。一方面可以增加传感器的数量,提高系统芯片算力,通过硬件协助软件算法作出更精准地判断;另一方面也可以利用5G V2X设施和高精度地图信息所获得的数据,以及以往所收集到的驾驶行为、驾驶经验、驾驶规则、案例和周边环境等数据信息,不断优化算法。
防患于未然,车企消除驾驶辅助系统安全隐患势在必行
相关机构预测,预计到2027年,全球自动驾驶市场规模将达到5754.73亿美元。虽然目前驾驶辅助技术日趋成熟,应用范围也越来越广,不过当面对复杂的道路情况以及不同的天气条件,仍然不可避免会出现一些问题。
纵观各类驾驶辅助功能BUG,共通之处在于系统算法存在一定的局限性,当外部环境发生变化,算法可能由于更新不及时导致识别出错,从而对用户体验和行驶安全造成严重影响。
所幸的是,目前因为驾驶辅助系统BUG所导致的严重事故并不普遍,车企对待此类问题的态度也值得肯定。不过,对于可能存在的驾驶辅助系统安全隐患,还是建议车企在新车上市前制定更加完善的软件验证方案,针对不同场景模式和极端环境进行充分测试,及时消除软件存在的问题,避免新车“带病”上市。另外,在新车上市后车企也应通过收集车辆数据,持续优化功能体验,主动发现问题,消除安全隐患,而不是在每次出现问题后亡羊补牢,被动解决问题。
总结:
驾驶辅助系统原本是为了在车辆行驶过程中,通过提前感知危险,更及时、有效地保护驾乘人员安全的一项技术。在不断发展过程中,难免会出现这样或那样的问题,但对于一些可能会造成行驶安全威胁的问题,车企万不可掉以轻心。只有持续发现和及时完善可能存在的安全隐患,最大程度提升消费者行驶安全和使用体验,才能真正推动智能驾驶辅助技术不断向前发展。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。