






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服视觉数据处理是汽车照明应用(例如自适应照明、地面投影和动画)不可或缺的一部分。图像处理和人工智能的进步正在增强这些系统,使其能够以更快的速度实时解密数据。然而,传统的数字信号接口为这些快速发展的系统造成了瓶颈。本文探讨了低压差分信号 (LVDS) 接口电路如何帮助设计人员克服与带宽、信号完整性和功耗相关的汽车照明挑战。
为了创造更安全的驾驶环境,原始设备制造商 (OEM) 和一级供应商正在开发自适应大灯,以动态调整以适应不同的道路和天气条件。最先进的大灯系统结合了外部灯光的动画控制或地面投影警告,但最受欢迎的应用之一是无眩光远光灯,它在检测到行人或汽车时自动调整光线分布。
实现无眩光前照灯的方法不止一种。有些架构采用纯机械方法,而其他架构(如自适应远光灯 (ADB) 系统)则控制 LED 阵列。
在 ADB 前照灯中,前置摄像头可捕捉实时路况数据并自动调整前照灯的照明配置。图 1 描绘了使用 LED 矩阵控制器的 ADB 系统的简化设计。主要模块包括摄像头、电子控制单元 (ECU) 和 LED 驱动模块。高速摄像头通过串行器-解串器接口将数据传输到位于 ECU 板上的微处理器或微控制器 (MCU)。MCU 计算像素配置并将控制数据传输到前照灯处的 LED 驱动模块。
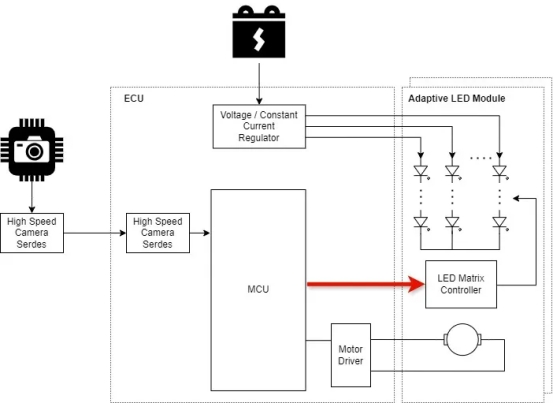
图 1:带 LED 矩阵管理器的自适应头灯
LED 模块可以使用 LED 矩阵控制器(如图 1 所示)或高密度 microLED,具体取决于目标分辨率。添加 LED 可以为自适应控制提供更高的分辨率。系统可以包含数十到数万个 LED。随着 OEM 继续将更高密度的 LED 装入前照灯中,所需的信号速率从每秒几兆位增加到每秒千兆位。由此产生的 ECU 到 LED 板接口必须适应这种带宽的大幅增加。
除了高速之外,该接口还需要稳健的长距离传输。差分信号的以下三个特性使其成为可靠汽车通信的绝佳选择:
· 差分信号方法通过两条互补路径将数据从驱动器传输到接收器。接收器旨在从两个信号之间的电压差(称为差分电压)中提取数据。这使接收器能够抑制传输介质上可能存在的共模噪声。
· 差分信号减少了驱动器和接收器之间的地线偏移的影响,因为数据不参考公共地。
· 以相等且相反的幅度平衡传输数据有助于最大限度地减少电磁干扰 (EMI)。
我将考虑四种常见的差分接口:控制器局域网 (CAN)、RS-422、RS-485 和 LVDS。标准的物理电气特性决定了支持的传输速率、长度、共模容差和功率等因素。表 1 总结了权衡利弊。

表 1:常见差分信号标准摘要
CAN 总线因其低成本、可靠性和极大的灵活性而在汽车行业拥有悠久的历史。CAN 协议由国际标准化组织 (ISO) 11898 标准化,该组织定义了开放系统互连 (OSI) 模型的数据链路层和物理层。仅考虑物理层,它使用平衡差分信号。CAN High 和 CAN Low 构成差分对,其中逻辑高电平信号为 3.5 V,逻辑低电平信号为 1.5 V。由此产生的差分电压摆幅为 2 V。
共模电压范围决定了发射器和接收器接地之间允许的电压差。ISO 11898 要求共模容差至少为 -2 V 至 7 V。考虑到这些电气参数,CAN 总线支持最长 40 米的总线长度和最多 30 个节点。数据速率最高限制为 1 Mbps。
尽管 CAN 是新标准的前身,例如支持高达 10 Mbps 速度的 CAN-Flexible Data Rate,但基于视觉的网络(如 ADB 系统)仍然需要更高的吞吐量。
RS-422(电信行业协会/电子工业联盟 [TIA/EIA] 422)和 RS-485(TIA/EIA-485)收发器也受到数据速率限制。这些规范仅定义物理层。两种标准都使用较大的差分电压摆幅(高达 5 V)来实现 1,200 米的传输距离。需要注意的是,数据速率和传输距离呈反比关系。随着频率的增加,最大允许距离会减小。这些标准还允许较大的共模电压范围,这使它们成为工业应用(例如工厂自动化和控制以及楼宇自动化)的理想选择,但不适合高速视觉网络。
顾名思义,LVDS 具有非常小的差分电压摆幅。这一特性和其他基本电气特性使其能够实现超过 3 Gbps 的信号传输速率、高达 10 米的传输距离和非常低的功耗,这些都是使用自适应 LED 控制的设计的优势。让我们仔细看看 LVDS 标准,以更好地理解其工作原理(图 2)。
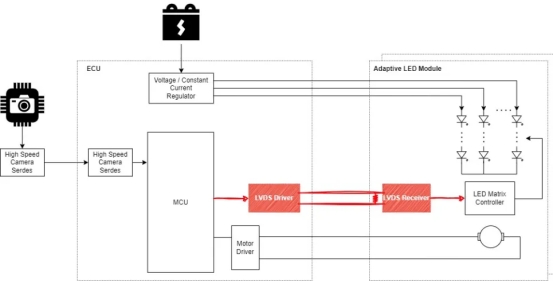
图2:点对点LVDS传输
最基本的 LVDS 链路由驱动器、传输介质、100 Ω 终端电阻和接收器组成。LVDS 驱动器接受单端互补金属氧化物半导体 (CMOS) 输入信号并将其转换为 LVDS 输出。驱动器包含一个 3.5 mA 恒流源,负责在终端电阻上产生非常小的 350 mV 差分。输入逻辑电平低或逻辑电平高控制驱动器电流的极性。由于电压摆幅很小,因此可以实现非常快的上升和下降时间,同时功耗也很小。
LVDS 接收器读取终端电阻两端的 ±350 mV 信号,并将其转换回单端 CMOS 输出。接收器的输入为高阻抗,确保电流通过终端电阻。TIA/EIA-644A 还规定最小共模电压范围为 ±1 V;但是,许多可用的 LVDS 接收器支持扩展的共模范围。LVDS 接收器的差分阈值电压为 100 mV,相对于差分输入提供了良好的裕度。
如图 3 所示,在 ECU 和 LED 模块上添加 LVDS 驱动器和接收器对可以解决自适应照明中的瓶颈问题。由于 LVDS 与协议无关,因此它为工程师提供了定义数据链路层的灵活性。在照明中,通常通过 LVDS 物理层传递通用异步接收器收发器 (UART) 等协议。LVDS 是一种非常成熟的标准,具有许多不同的产品和设备功能。德州仪器 (TI) 的产品组合包括数百种 LVDS 设备,涵盖不同的通道数、产品等级、电压和数据速率。对于自适应照明应用,DS90LV011AQ-Q1 和 DS90LT012AQ-Q1 是经济高效的汽车级驱动器和接收器对。TI 的 DS90LVRA2-Q1 是一款汽车级双通道 LVDS 接收器,支持 3.3-V、2.5-V 和 1。8V 逻辑电压,用于与低压处理器实现互操作性。
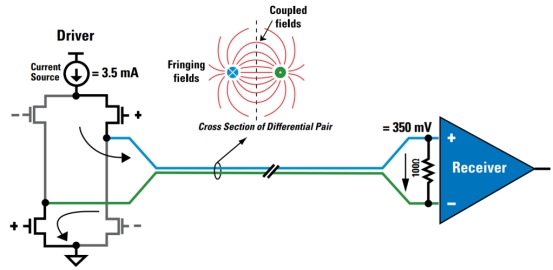
图 3:采用 LVDS 驱动器和接收器的自适应 LED 控制
自适应大灯正迅速成为整个汽车行业的常见设备。这些系统正在颠覆汽车照明生态系统,需要更高性能的接口标准。LVDS 使这些系统能够通过可靠的低延迟通信实时控制 LED 照明配置文件。
相关文章









