1.iiC设备的功能
很显然,IIC控制器提供了传输数据的能力,至于数据有什么含义,IIC控制器并不知道,数据的含义有外部i2c从设备,我们需要阅读芯片手册,才知道IIC控制器应该发出怎样的数据。
下图是AT24cxx的操作方法:

2.I2c程序框架
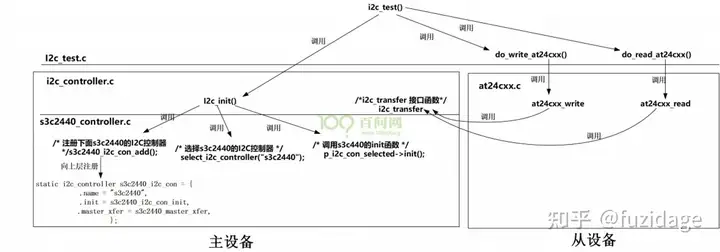
显然我们的程序应该分为两层(IIC设备层,IIC控制器层),框架如下图所示:

最上层是i2c_test层,用来对i2c的功能进行测试和验证。
第2层是i2c设备层,用来对具体某一型号的从设备进行i2c读写
第3层是通用i2c控制器层,用来提供对具体某一型号的i2c主控进行管理操作
最底层是i2c控制器具体的型号层
在通用i2c控制层,我们提供一个统一的接口i2c_transfer,不关使用哪个芯片,他最终都会调用i2c_transfer,来选择某一款I2C控制器,把数据发送出去,或者从I2c设备读到数据。
对于每一次传输的数据都可以用一个i2c_msg结构体来表示。但是,读某个地址的数据时,就要用两个i2c_msg结构体来描述它,因为一个i2c_msg结构体只能描述一个传输方向(读/写),我们读取ac24ccxx某个地址上的数据时,要先写出要读取的地址,然后来读取设备地址上的数据。

i2c_test.c文件
该文件的内容如下:
void i2c_test(void) { /* 初始化: 选择I2C控制器 */ /* 提供菜单供测试 */ }
这个菜单最终会调用到at24cxx.c里面的函数。
at24cxx.c文件
在里面会使用标准的接口i2c_transfer来启动I2C传输。该文件的内容如下:
#define AT24CXX_ADDR 0x50 int at24cxx_write(unsigned int addr, unsigned char *data, int len) { i2c_msg msg; int i; int err; unsigned char buf[2]; for (i = 0; i < len; i++) { buf[0] = addr++; buf[1] = data[i]; /* 构造i2c_msg */ msg.addr = AT24CXX_ADDR; msg.lags = 0; /* write */ msg.len = 2; msg.buf = buf; msg.err = 0; msg.cnt_transferred = -1; /* 调用i2c_transfer */ err = i2c_transfer(&msg, 1); if (err) return err; } return 0; } int at24cxx_read(unsigned int addr, unsigned char *data, int len) { i2c_msg msg[2]; int err; /* 构造i2c_msg */ msg[0].addr = AT24CXX_ADDR; msg[0].lags = 0; /* write */ msg[0].len = 1; msg[0].buf = &addr; msg[0].err = 0; msg[0].cnt_transferred = -1; msg[1].addr = AT24CXX_ADDR; msg[1].lags = 1; /* read */ msg[1].len = len; msg[1].buf = data; msg[1].err = 0; msg[1].cnt_transferred = -1; /* 调用i2c_transfer */ err = i2c_transfer(&msg, 2); if (err) return err; return 0; }
View Code
i2c_controller.h文件
typedef struct i2c_msg { unsigned int addr; /* 7bits */ int flags; /* 0 - write, 1 - read */ int len; int cnt_transferred; unsigned char *buf; }i2c_msg, *p_i2c_msg; typedef struct i2c_controller { int (*int)(void); int (*master_xfer)(i2c_msg msgs, int num); char *name; }i2c_controller, *p_i2c_controller;
i2c_controller.c文件
该文件的内容如下:
#define I2C_CONTROLLER_NUM 10 /* 有一个i2c_controller数组用来存放各种不同芯片的操作结构体 */ static p_i2c_controller p_i2c_controllers[I2C_CONTROLLER_NUM]; static p_i2c_controller p_i2c_con_selected; void register_i2c_controller(p_i2c_controller *p) { int i; for (i = 0; i < I2C_CONTROLLER_NUM; i++) { if (!p_i2c_controllers[i]) { p_i2c_controllers[i] = p; return; } } } /* 根据名字来选择某款I2C控制器 */ int select_i2c_controller(char *name) { int i; for (i = 0; i < I2C_CONTROLLER_NUM; i++) { if (p_i2c_controllers[i] && !strcmp(name, p_i2c_controllers[i]->name)) { p_i2c_con_selected = p_i2c_controllers[i]; return 0; } } return -1; } /* 实现 i2c_transfer 接口函数 */ int i2c_transfer(i2c_msg msgs, int num) { return p_i2c_con_selected->master_xfer(msgs, num); } void i2c_init(void) { /* 注册下面的I2C控制器 */ s3c2440_i2c_con_add(); /* 选择某款I2C控制器 */ select_i2c_controller("s3c2440"); /* 调用它的init函数 */ p_i2c_con_selected->init(); }
View Code
有数组一定有注册函数register_i2c_controller会把下面实现的I2C控制器结构体i2c_controller放到i2c_controller数组里面。select_i2c_controller函数根据名字来选择某款I2C控制器后,以后就会使用被选择的I2C控制器来启动传输。
s3c2440_i2c_controller.c文件
中断服务函数,当发生中断时,就会调用中断服务函数,代码如下(详细内容见下一节):
void i2c_interrupt_func(int irq) { /* 每传输完一个数据将产生一个中断 */ /* 对于每次传输, 第1个中断是"已经发出了设备地址" */ }
s3c2440_i2c_con_init函数,用来初始化I2C,控制器代码如下:
void s3c2440_i2c_con_init(void) { /* 配置引脚用于I2C*/ GPECON &= ~((3<<28) | (3<<30)); GPECON |= ((2<<28) | (2<<30)); /* 设置时钟 */ /* [7] : IIC-bus acknowledge enable bit, 1-enable in rx mode * [6] : 时钟源, 0: IICCLK = fPCLK /16; 1: IICCLK = fPCLK /512 * [5] : 1-enable interrupt * [4] : 读出为1时表示中断发生了, 写入0来清除并恢复I2C操作 * [3:0] : Tx clock = IICCLK/(IICCON[3:0]+1). * Tx Clock = 100khz = 50Mhz/16/(IICCON[3:0]+1) */ IICCON = (1<<7) | (0<<6) | (1<<5) | (30<<0); /* 注册中断处理函数 */ register_irq(27, i2c_interrupt_func); }
View Code
1).IICCON = (0<<6) | (1<<5) | (30<<0); 设置IICCON控制寄存器。选择发送时钟,使能中断。设置ACK应答使能,bit[7]。
2).register_irq(27, i2c_interrupt_func):注册中断处理函数,当发生I2C中断的时候就会调用i2c_interrupt_func中断处理函数。
初始化完成后,就可以调用do_master_tx写I2C从机了,这个函数仅仅启动I2C传输,然后等待,直到数据在中断服务程序中传输完毕后再返回。函数代码如下:
int do_master_tx(p_i2c_msg msg) { p_cur_msg = msg; msg->cnt_transferred = -1; msg->err = 0; /* 设置寄存器启动传输 */ /* 1. 配置为 master tx mode */ IICCON |= (1<<7); /* TX mode, 在ACK周期释放SDA */ IICSTAT = (1<<4); /*IIC-bus data output enable/disable(1: Enable Rx/Tx)*/ /* 2. 把从设备地址写入IICDS */ IICDS = msg->addr<<1;//[slave addr [7:1], addr[0] is trans dir] /* 3. IICSTAT = 0xf0 (启动传输), slave addr数据即被发送出去,当到达第9个clk,无论是否有ack, 将导致中断产生 */ IICSTAT = 0xf0; /* 后续的传输由中断驱动 */ /* 循环等待中断处理完毕 */ while (!msg->err && msg->cnt_transferred != msg->len); if (msg->err) return -1; else return 0; }
View Code
1).IICDS = msg->addr<<1: 把从机地址(高7位,所以需要向右移一位)写入到IICDS寄存器中。
2).IICSTAT = 0xf0:设置IICSTAT寄存器,将s3c2440设为主机发送器,并发出S信号后,紧接着就发出从机地址。后续的传输工作将在中断服务程序中完成。
do_master_rx函数的实现和do_master_tx函数类似,代码如下:
![]()
![]()
int do_master_rx(p_i2c_msg msg) { p_cur_msg = msg; msg->cnt_transferred = -1; msg->err = 0; /* 设置寄存器启动传输 */ /* 1. 配置为 Master Rx mode */ IICCON |= (1<<7); /* RX mode, 在ACK周期回应ACK */ IICSTAT = (1<<4); /*IIC-bus data output enable/disable*/ /* 2. 把从设备地址写入IICDS */ IICDS = (msg->addr<<1)|(1<<0); /* 3. IICSTAT = 0xb0 , 从设备地址即被发送出去, 将导致中断产生 */ IICSTAT = 0xb0; /* 后续的传输由中断驱动 */ /* 循环等待中断处理完毕 */ while (!msg->err && msg->cnt_transferred != msg->len); if (msg->err) return -1; else return 0; }
View Code
1).IICDS = (msg->addr<<1)|(1<<0):把从设备地址写入IICDS,前7位是从机地址,第8位表示传输方向(0表示写操作,1表示读操作)。
s3c2440传输函数,根据标志位flags,来指明是读/写(1:读 0:写)。代码如下:
int s3c2440_master_xfer(p_i2c_msg msgs, int num) { int i; int err; for (i = 0; i < num; i++) { if (msgs[i].flags == 0)/* write */ err = do_master_tx(&msgs[i]); else err = do_master_rx(&msgs[i]); if (err) return err; } return 0; }
s3c2440_i2c_con_add函数把上面定义的s3c2440_i2c_con结构体注册到上层的i2c_controller数组中.
void s3c2440_i2c_con_add(void) { register_i2c_controller(&s3c2440_i2c_con); }
我们定义一个i2c_controller结构体s3c2440_i2c_con。下面的代码对他进行初始化。
static i2c_controller s3c2440_i2c_con = { .name = "s3c2440", .init = s3c2440_i2c_con_init, .master_xfer = s3c2440_master_xfer, };
框架总结如下: