PWM控制型IGBT的EMI机理与抑制优化设计方法探讨
1. 运行过程中的dv/dt特性分析
(1)波形边沿叠加特性
驱动器类IGBT控制方式,特别是变频器类,有无PG V/f 控制、带PG V/f控制、无PG矢量控制、带PG矢量控制等等不同的控制方式和术语描述,总结来说为三大类:VF、开环矢量、闭环矢量控制。不同的控制方式发波方式会有所差别。
同时抓取上桥T1、T3、T5的Vce波形,来综合说明驱动器运行过程中的Vce的发波模式。
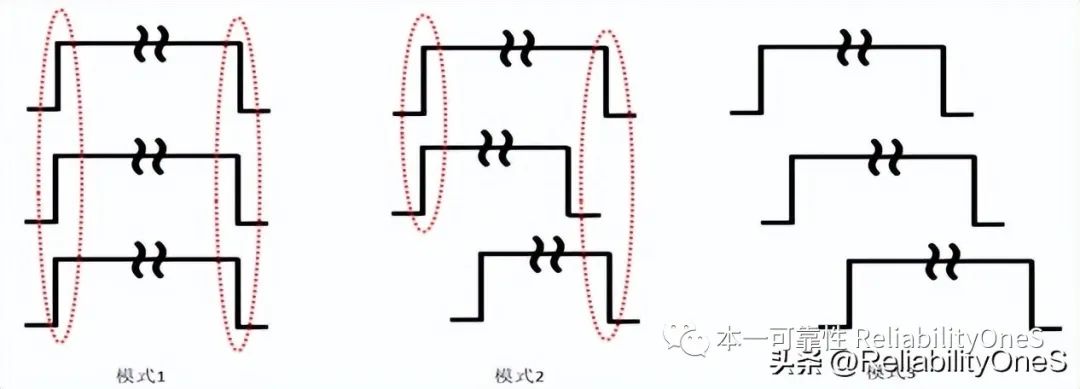
发波模式示意图
模式1:刚启动或0HZ运行时,三个管子的边沿(上升沿或下降沿)重叠在一起;
模式2:随着运行频率的增加,三个管子波形逐渐错开,两个管子的边沿(上升沿或下降沿)重叠在一起;
模式3:速度稳定时,三个管子边沿交错开,无叠加出现;
VF模式控制:模式1和模式2;
其他模式控制:模式2和模式3;
(2)干扰影响分析
干扰电流峰值:把单管噪声电流记为Icm=C回路dV/dt,所以,模式1峰值干扰电流相当为3Icm、模式2峰值干扰电流为2Icm、模式3峰值干扰电流相当为1Icm。
(3)干扰强度比较
因工作在模式1和模式2,所以VF控制下的噪声量级比其他控制方式下的更强,特别是0HZ或低频运行时。
(4)同一驱动参数下dv/dt随输出电流变化的特性
turn on (下降沿)与turn off(上升沿)的dv/dt的特性总结如下:
上升沿与下降沿在电流过零点处的dv/dt最大;
上升沿的dv/dt在电流正半周比在负半周大;
上升沿的dv/dt在电流正半周内随电流的增大逐渐变小,电流最大时dv/dt最小;
下降沿的dv/dt在电流负半周比在正半周大;
下降沿的dv/dt在电流负半周内随电流绝对值变大逐渐变小,电流绝对值最大时dv/dt最小;
上升沿的dv/dt在电流负半周期内随电流绝对值变大而变大;
下降沿的dv/dt在电流正半周期内随电流变大而变大;
2. IGBT Vce噪声源抑制方法
经过以上分析,有以下四种抑制方法:
0HZ或低频不发波,或启动频率提高(如1HZ以上才发波);
降低五段发波与七段发波的运行切换点,降低有效发波次数;
Vce边沿交错控制最小化dv/dt,使得干扰电流峰值最低,同时对损耗没有影响;
Vce边沿变缓设计;
固定参数设计----应用较多,一般负载越重开关损耗越大,与EMI互为矛盾点,需要权衡;
dv/dt在线调整控制,最优化EMI与损耗的折中设计;
3. Vce边沿交错控制
边沿交错控制的本质是增大各个管子开通关断的时间间隔,使得各个电压波形边沿不重叠,降低dv/dt,从而减小干扰。
(1)设计点
改变死区时间来完成边沿交错的控制,但要注意时间不宜过大,一般错开共模电流第一个波峰宽度就可以了。

边沿交错控制示意图
(2)负面影响
因死区时间的调节控制,可能带来驱动器输出电流的非正弦化,需要额外的手段进行正弦化的处理。
(3)应用场合
特定场合。
4. dv/dt在线调整控制
因电机负载的电感特性,使得IGBT开关动作时,电流不会立即降为零,需要等到CE两级的载流子逐渐消失后,才能彻底的关断,电感中的电流变化影响着IGBT的turn on与turn off时间。线调整控制的本质是找到dv/dt与输出电流的周期性变化规律,从而设计出适合的驱动参数,使得EMI与损耗最优化。实际测试中也发现dv/dt与驱动参数及输出电流大小等因素相关。
驱动器不接电机,dv/dt测量很稳定,在不同运行频率下测得的结果都一样;
驱动器接电机(空载与加载),dv/dt随电流的变化而变化。在相同的IGBT的g极驱动参数下,电流越大dv/dt越小;
(1) 设计点
由变化过程中过零点为dv/dt最大点,保证过零点dv/dt满足EMI要求,再根据输出不同电流动态调整dv/dt,使得趋近于过零点的dv/dt。其驱动控制电路示意图参见图16,dv/dt的驱动参数设计方向参见图17。

图16 驱动控制电路示意图

图17 dv/dt设计方向-上升沿dv/dt设计

图17 dv/dt设计方向-下降沿dv/dt设计
(2)dv/dt在线调整控制的优点
dv/dt在整个周期内为满足EMI需求的最大值,大大减小了开关损耗,最优化EMI与损耗的设计;
不需要在IGBT的E级上串电感,而引发的谐振风险;
(3)G级驱动部分,有以下两种实现方法
采用不同的驱动参数组合;
采用栅极电流控制芯片;
(4) 负面影响
增加控制电路与电流检测电路,成本增加,控制稍复杂;
(5) 应用场合
通用。
5. 应用案例调查
边沿交错控制技术目前了解到还没有企业来做,未来特性场合下可能会有应用;
不同驱动参数组合的动态调整,已经有实际应用(例:某公司的深海探测器的高压电源产品,解决系统自扰问题)。
栅极电流控制芯片,在行业有应用,功率半导体驱动芯片厂家也已经有标准品或根据客户需求进行定制。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。