激光切割机床在切割物料时能做到不差毫厘;
我们转动汽车方向盘时,车轮轻松达到精确的转弯角度;
……
在我们生活中,这些理所当然的场景,都是靠电机在背后默默输出动力!而电机准确判断出动力角度及速度还要归功于传感器。
三类常用编码器对比
根据编码器的工作方式,我们把编码器分成三大类:光电编码器、旋转变压器、磁编码器。
光电编码器,顾名思义就是通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量。
光电编码器的输出通常是三根信号线,其中AB线是相差90°的正交脉冲,可以盘点电机旋转方向,Z线输出转速的脉冲信号。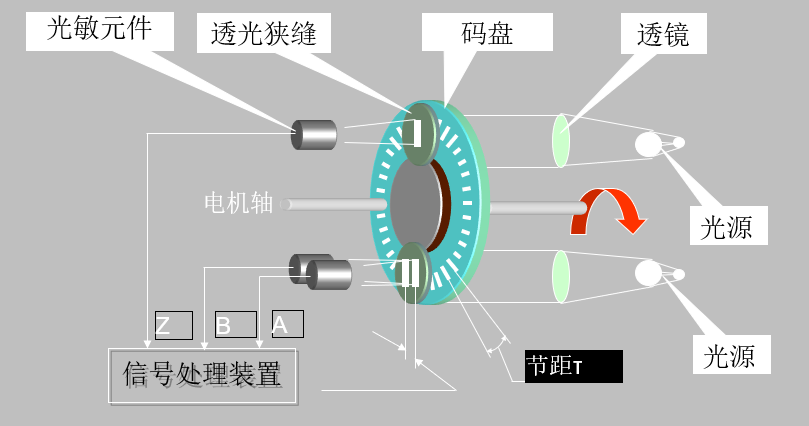
光电编码器原理
旋转变压器,与普通变压器类似,旋转变压器的一次侧绕组作为激磁绕组,运行时通入激磁信号;二次侧作为信号绕组,运行时通过和激磁绕组互感产生信号,并随着相对旋转,输出两相包含转子位置信息的正余、弦信号,通过解码软硬件进行解码后获取位置角。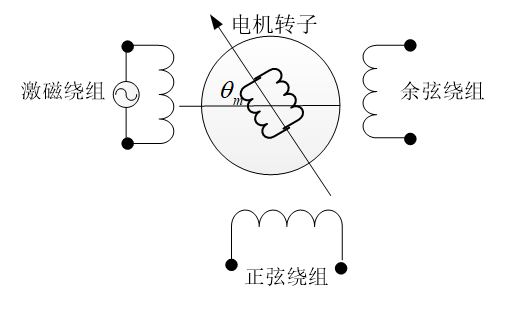
旋转变压器原理
磁编码器,采用磁电设计,由磁感应器件的磁场变化来产生或提供电机的位置和速度。磁性编码器内部的磁敏元件是重要组成部分,他们的电阻会因为外加磁场的变换增加或减少。
电阻的变换量称为磁阻,这种发生变化的现象为磁阻效应。磁敏元件的灵敏度非常高,所以磁编码器输出十分的精准。
三种编码器对比: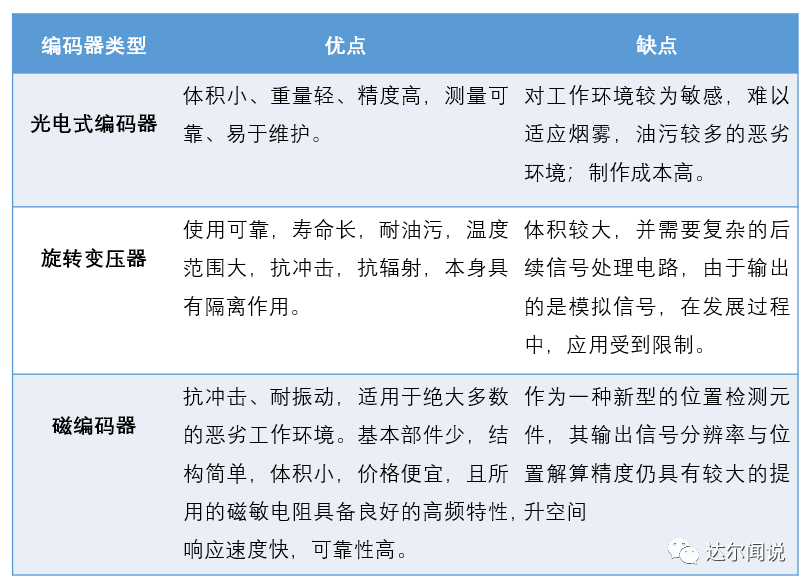
与光编和旋转变压器相比,磁编码器因为其所需器件数量少、结构简单、安装方便,又抗震、耐腐蚀等,出现在很多控制应用中,比如伺服数控机床、无人机、手持云台、机器人、机械手臂中会出现磁编码器的身影。除此之外,在汽车应用中,磁编码器也是处处可见。
典型编码器之磁编码器的应用场景
✦ 正式讲应用前,进一步给大家普及下磁编码器的工作原理:
磁编码器的信号处理部分是通过软、硬件技术从磁敏元件输出的正余弦信号中提取出高精度的转角位置信息。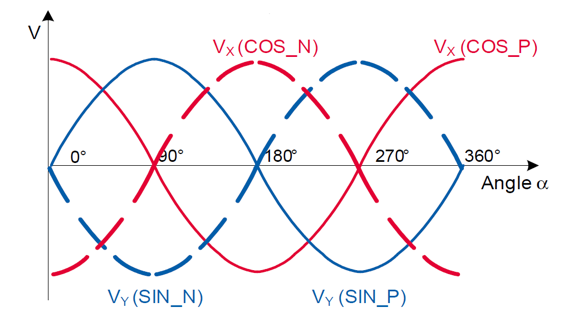
磁编码器输出正交信号 硬件部分负责对传感器的两相输出正交信号进行放大、调理、变换,使得硬件处理后的信号能够适用于微处理器的采样和软件处理,而软件部分则是通过对采样数据的解码运算和误差校正,从采集的两相正交信号数据中获取优化后的角度位置信息,并以增量式编码或数字式通信的方式输出角度位置信息,从而实现磁编码器的整体结构设计。
✦ 常用(位置)磁编码器:它不受恶劣环境因素的干扰,可一直保持自身的高精度输出。所以越来越多的高精度场合使用了磁编码器。 磁编码器内部磁敏元件的磁阻效应通常分为以下几类:
AMR(各向异性磁阻效应):铁磁材料的电阻率随自身磁化强度和电流方向夹角改变而变化。
GMR(巨磁阻效应):巨磁阻效应是指磁性材料的电阻率在有外磁场作用时较之无外磁场作用时存在巨大变化的现象。巨磁阻产生于层状的磁性薄膜结构,晚于AMR出现,但是灵敏度比较高,是应用最广泛的。
TMR(穿隧磁阻效应):利用磁性多层膜材料的磁道电阻效应对磁场进行感性,比ARM和GMR具有更大的电阻变化率,是目前最新的磁阻效应,相应的磁编码器输出灵敏度是最高的。









