本文中以一款新型双电机耦合系统电动汽车(dual-motor coupling-propulsion electric vehicle,DMCP-EV)为研究对象,制定了基于PSO算法系统效率优化的驱动模式控制策略,在满足动力性要求的基础上提高了整车经济性。
1 双电机耦合动力系统模型
1.1 双电机动力系统构型介绍
该款新型耦合驱动系统如图1所示。在该耦合驱动构型中,电机M1与太阳轮S相连,电机M2与连接器T相连。制动器L1与太阳轮S同轴,当L1闭合时,太阳轮被固定,电机M1停止运行。制动器L2与齿圈R相连,当L2闭合时,齿圈R固定。减速齿轮G1与齿圈R相连,当连接器T位于右端时,三者相连接,随电机M2的运转而运行;当连接器T位于中间时,电机M2关闭;当连接器T位于左端时,两电机转矩在太阳轮C处耦合。

图1 新型双电机耦合系统构型
当汽车正常行驶时,整车控制器接受并处理来自传感器的信号,向电机控制器等执行器发出指令,通过控制连接器T及制动器L1、L2的开闭,使动力系统工作在不同的工作模式:电机M1单独驱动模式(定义为SM1)、电机M2单独驱动模式(定义为SM2)、双电机转矩耦合模式(定义为TC)、双电机转速耦合模式(定义为SC)以及再生制动模式。由于本文重点研究的是驱动系统的驱动性能,故在此暂不考虑再生制动的控制。本文中所研究的某款纯电动汽车的具体动力部件参数见表1。
表1 EV动力部件参数

1.2 双电机动力系统建模
1.2.1 工作模式分析
当制动器L1断开,L2闭合,且连接器T位于中间位置时,电机M1工作,M2关闭,系统处于电机M1单独驱动模式,则SM1系统动力学模型为

式中:n1为电机M1的转速;T1为电机M1的转矩;r为车轮半径;k为行星架特征参数;i0为主减速器传动比;F t为驱动力;v为车速。
当制动器L1闭合,L2松开且连接器T位于右端时,电机M1停止,M2运转,功率经减速齿轮、行星架输出。此时为电机M2单独运行模式,SM2模式系统动力学模型为

式中:i g为减速齿轮组的传动比;n2为电机M2的转速;T2为电机M2的转矩。
当制动器L1断开,L2闭合,且连接器T位于左端时,两个电机的转矩在太阳轮处耦合,经行星架传递到车轮,驱动汽车行驶。系统处于双电机转矩耦合模式TC,此时的系统动力学模型为

当制动器L1、L2断开,连接器T位于右端时,两电机转速在行星架处耦合,动力经行星架传递到车轮,驱动汽车行驶。系统处于双电机转速耦合模式,此时系统动力学模型可表示为

1.2.2 系统效率建模
不同模式下的系统效率数学模型为
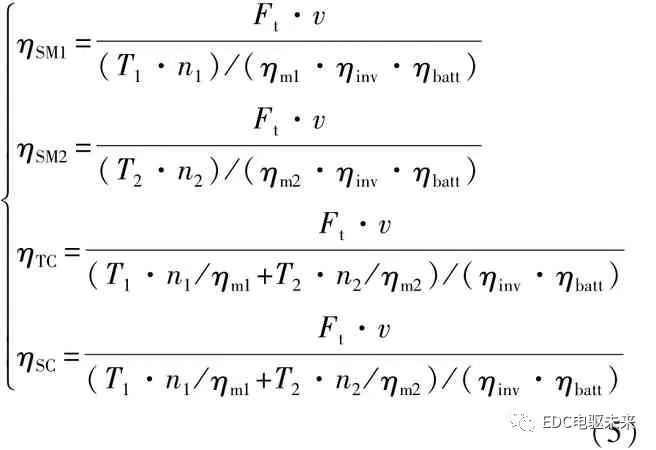
式中:ηSM1、ηSM2、ηTC、ηSC分别为 SM1、SM2、TC、SC模式下的系统效率;ηinv为逆变器效率。
约束条件为
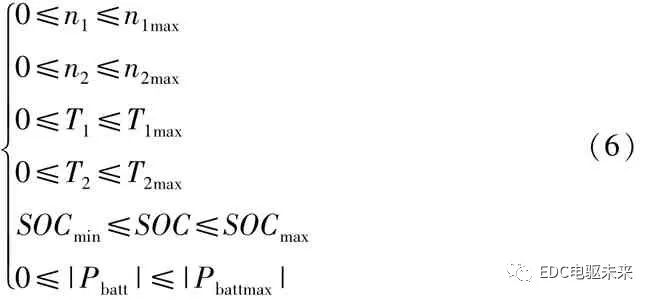
式中:n1max、n2max分别为电机 M1、M2的最大转速;SOC min为电池组最小荷电状态;SOC max为电池组最大荷电状态;P battmax为当前SOC对应的最大放电功率。
2 驱动系统模式划分与控制策略
2.1 不同模式工作范围的划分
基于上述分析可知,DMCP-EV具有4种驱动模式。在动力需求的约束下,整车控制器根据获得的实时行驶速度、加速度信号、驱动电机的工作特性以及各个模式的工作原理,获得各个模式的工作范围。对各个模式工作范围的划分流程如图2所示,可简述如下,首先由车载传感器采集到速度、加速度信号,然后根据各个模式的动力学模型以及速度等信息,计算各个模式在该工况下所需要的电机转矩、转速,则可以获得各个模式的有效工作范围,如图3所示。
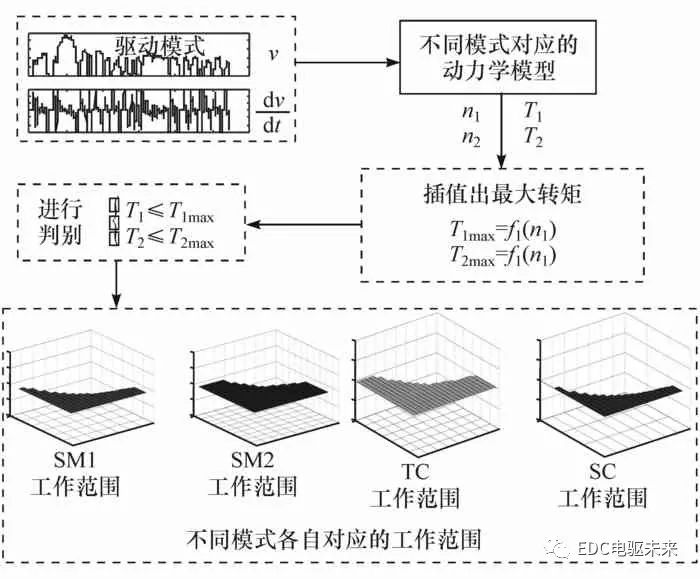
图2 不同模式工作范围划分流程
2.2 基于PSO算法的耦合模式下系统效率优化

图3 不同模式下的有效工作范围
依据以上各模式工作范围的划分,满足当前速度、加速度以及驾驶员需求的工作模式可能有多种。为提高经济性,采用PSO优化各模式的系统效率,并根据当前行驶工况选择效率最优的工作模式。据此,本文中制定基于PSO系统效率优化的双电机耦合驱动系统控制策略,其框架如图4所示。控制策略是根据当前工况选择效率最优工作模式,具体步骤如下:
(1)判断满足当前工况的工作模式的情况;若仅有一个适合的模式,则选择该模式;若存在多个驱动模式,则进入系统效率优化控制模式;
(2)计算满足当前工况的各个工作模式系统效率,其具体计算过程详见1.2.2节;
(3)选择系统效率最高的工作模式作为当前工作模式以提高整车经济性。

图4 基于粒子群算法的模式划分及控制流程
2.2.1 TC模式下的系统效率优化
TC模式下,两电机的转速与车速成比例,两电机的转矩相耦合,可以在约束范围内进行调节。采用粒子群优化算法优化两电机的转矩分配,以获得系统最优效率。PSO算法初始参数和系统效率流程如图5所示。TC模式系统效率优化过程为:给定速度和加速度,通过粒子群优化算法获得电机M1、M2的目标转矩,使系统效率ηTC达到最优。优化模型如下。
目标函数(适应度函数):

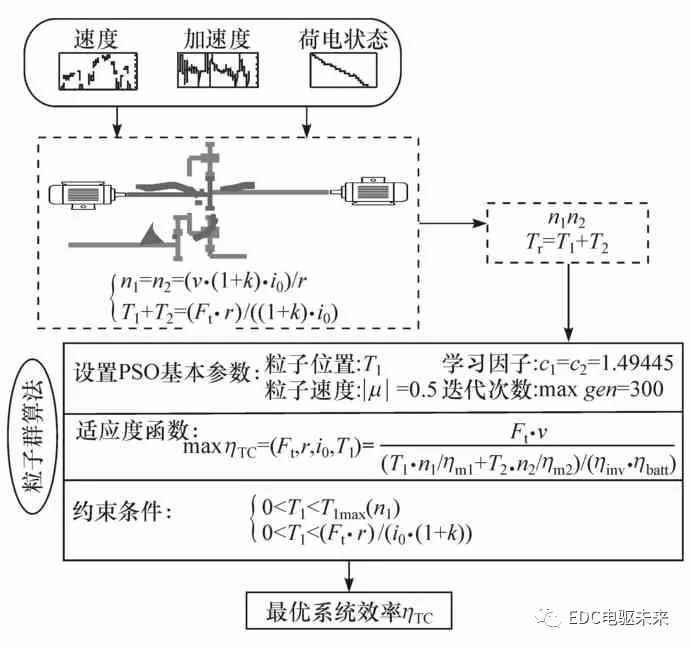
图5 粒子群算法优化系统效率流程图
约束条件:

选取M1电机的转矩T1作为控制变量,则其相应粒子的位置为

式中:i为粒子编号;j为迭代次数。
系统效率寻优结果如图6所示。由图可以看出,系统效率在第40代左右收敛至最优值。TC模式下的最优转矩分配如图7所示。
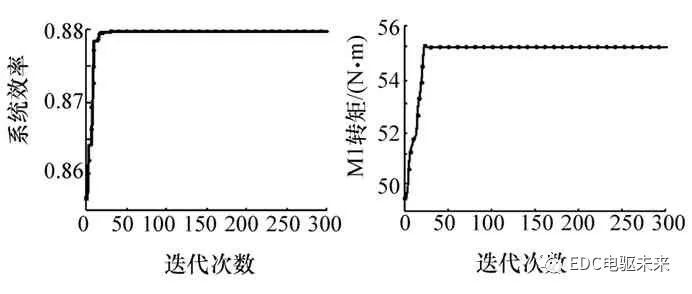
图6 PSO算法寻优迭代图
2.2.2 基于系统效率优化的模式控制
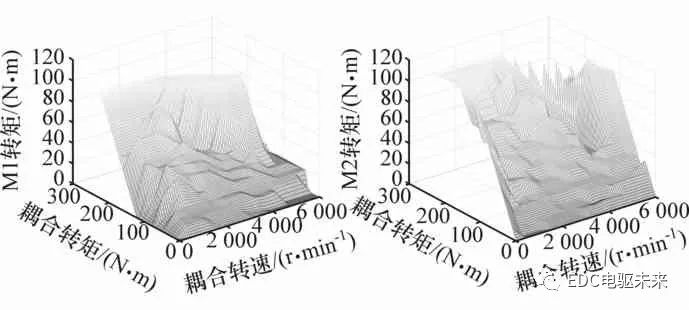
图7 TC模式下的最优转矩分配
在SC模式下,两电机的转矩与驱动力矩成比例,两电机的转速相耦合,可以在约束范围内调节。与TC模式类似,SC模式获取最优系统效率关键是合理分配两电机的转速。同样采用粒子群算法优化,具体求解过程与TC模式类似。图8为SOC=0.9时优化后不同模式下的系统效率。适合当前工况的最佳驱动模式可通过比较该工况下4种驱动模式的系统效率而得出,即可以获得4个工作模式的工作边界,如图9(a)所示。为减少计算量并提高整车控制器工作效率,提前划分了各个工作模式的工作边界,如图9(b)所示。并将结果制成表格存储在控制器中,通过查表获得当前最优工作模式。

图8 SOC为0.9时不同模式下的系统最优效率
3 仿真与试验验证
3.1 PSO优化前后仿真验证
在Matlab/Simulink环境下实现装备该新型双电机耦合驱动系统的整车模型的搭建,通过优化前后结果对比来验证所提出的基于PSO系统效率优化的模式划分及选择策略的有效性。为体现对比结果的公正性,未经PSO效率优化的系统的模式划分方法与本文相同,模式的选择同样基于瞬时最优的原则,该模式选择策略分别实时计算当前工况下4种工作模式的需求功率,选取需求功率最小的模式作为当前工况下的工作模式。两者在城市道路循环UDDS下进行仿真,结果如图10(a)所示。由图可见,在整个工况过程中,实际车速很好地跟随目标车速。驱动时,该系统基于所提出的控制策略,自动匹配适合当前工况的工作模式,从而在满足车辆动力性能需求的同时,保证了较低的能耗。图10(b)和图10(c)示出该系统优化前后的工作模式随UDDS工况切换的情况,“1~4”分别表示 SM1、SM2、TC、SC工作模式。
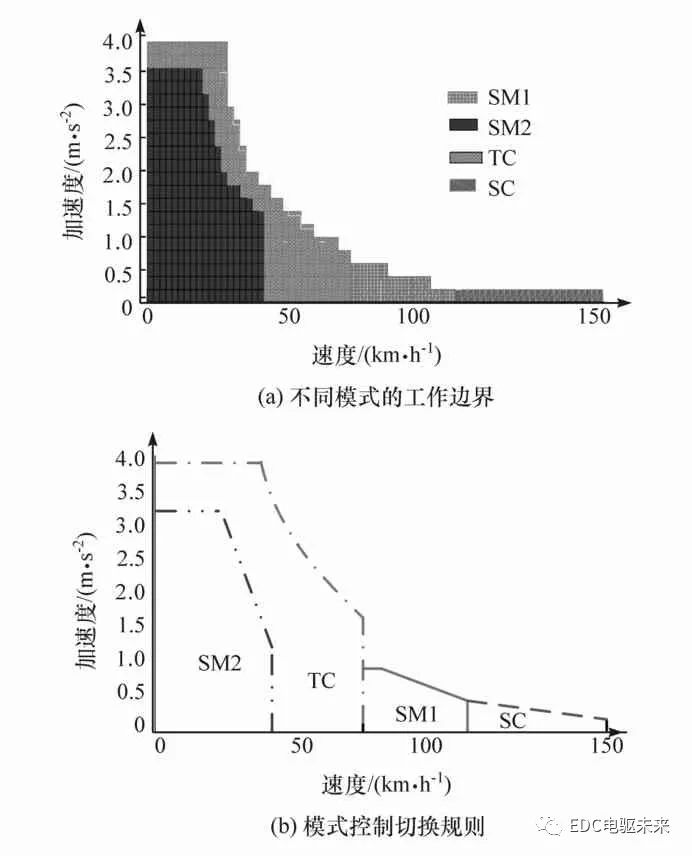
图9 不同模式的工作边界

图10 车速跟随情况和优化前后的工作模式切换情况
图11给出了该系统PSO优化前后的两电机的转矩和转速。可以看出,优化前后的M1、M2电机转矩和转速分配变化明显。图12为优化前后的电机转矩以及转速的对比。可以看出,经优化重新分配转矩转速后,该系统的SOC变化范围缩小,能耗从优化前的1.165降低为1.036 kW·h,降低了11%左右,达到了提高整车能量经济性的目的。
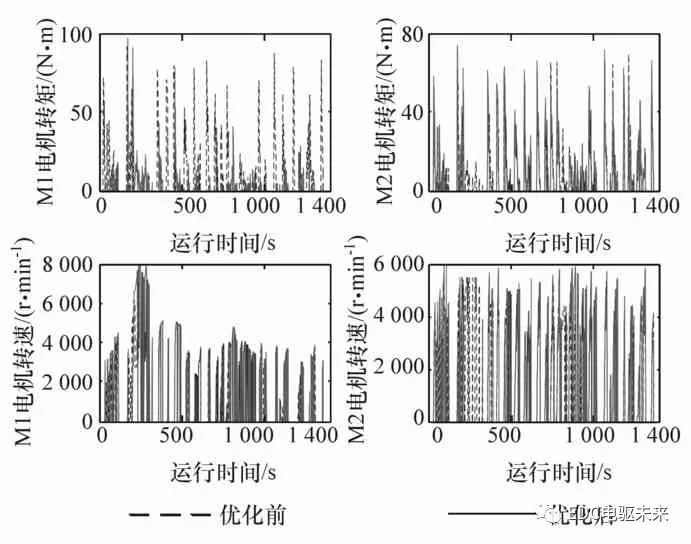
图11 优化前后的M1、M2电机转矩转速对比

图12 优化前后的SOC和能耗对比
3.2 基于PSO系统优化前后台架试验验证
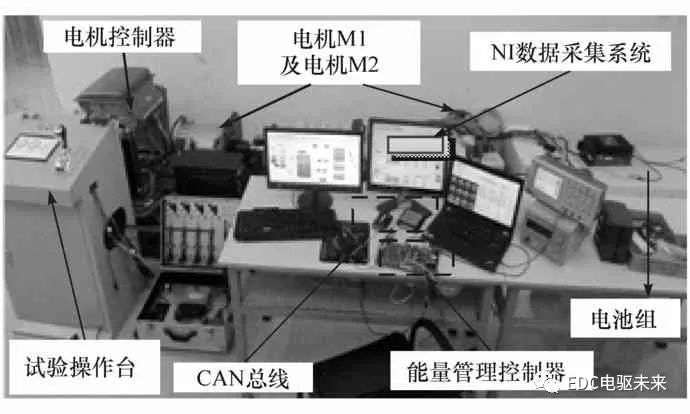
图13 台架试验实物图
为验证PSO系统效率优化的实际效果,基于双电机耦合驱动系统试验平台(图13)进行台架试验。选用飞思卡尔MC9S12EQ512汽车级微处理器作为该试验平台的主控制器主芯片。采用CAN总线进行数据通信,波特率设为250 kbps,采用J1939应用协议。使用LabVIEW软件设计上位机数据采集系统的软件部分,硬件部分由PXI数据采集卡、传感器和计算机组成。
试验分别以UDDS和EUDC循环工况进行验证。测得速度、系统效率和电池SOC的曲线图,并与仿真结果进行对比,结果如图14所示。可以看出,台架试验与仿真结果趋势基本一致。

图14 UDDS和EUDC工况下的台架试验与仿真结果对比
综合上述的仿真和台架试验验证的结果,表明所制定的基于PSO系统效率优化后的DMCP-EV驱动模式控制能够有效改善双电机驱动系统的驱动效率,从而降低了能耗,提升了整车经济性。
4 结论
(1)针对一款新型双电机耦合驱动系统及其多模式驱动特性,建立双电机驱动系统动力学和系统效率模型,并制定了经PSO系统效率优化的驱动模式控制策略。
(2)通过仿真和台架试验验证的结果表明,针对DMCP-EV所制定的经PSO系统效率优化的驱动模式控制策略,可获得更合适的驱动模式,提升双电机驱动系统的驱动效率,从而进一步提高DMCP-EV的经济性,优化后能耗降低11%。