AUTOSAR中gPTP协议介绍
相比IEEE802.1AS规范中定义的gPTP协议,AUTOSAR组织结合车载网络应用场景针对其部分内容也做了进一步限制与约束,以便能够更加灵活应用,降低整个系统的集成难度。
AUTOSAR规范中的gPTP主要约束条件如下:
由于车载网络属于静态网络,不支持BMCA算法;
不支持Anounce与Signaling报文的发送与接收;
Pdelay_Req不作为开启发送SYNC报文的前置条件;
IEEE802.1AS规定不能发送带有VLAN信息的时间同步报文,但AUOTSAR允许使用带有VLAN信息的报文,前提是网关支持转发预留的多播地址01:80:C2:00:00:00. 0F的报文;
报文中的CRC保护措施不能作为信息安全的内容;
报文类型与格式
在AUTOSAR中的gPTP协议支持SYNC, Follow-up,Pdelay_Req,Pdelay_Resp,Pdelay_Resp_Follow_up 五类报文。
其中SYNC,Pdelay_Req,Pdelay_Resp报文属于事件型报文,因为都需要记录收发时刻的时间戳,而Follow-up,Pdelay_Resp_Follow_up则属于一般性报文,因为不记录该类收发时刻的时间戳,仅关注其承载信息,如下图所示。
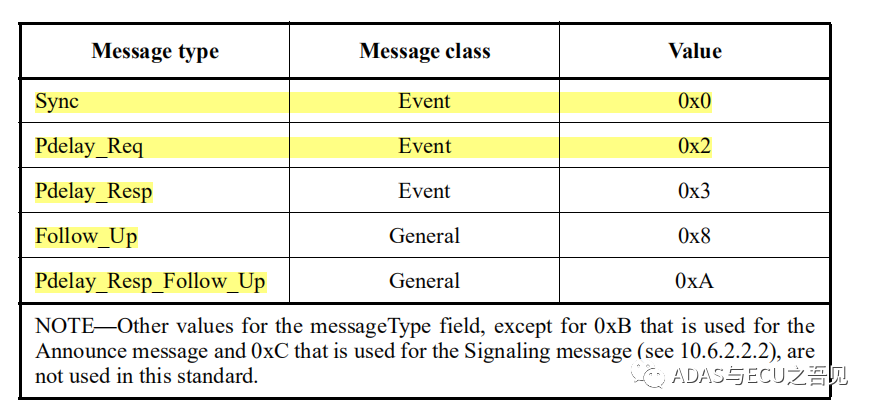
图7 gPTP时间同步报文类型定义
上述五类报文按照AUTOSAR定义可以通过参数MessageCompliance来进行统一控制,如果该参数为TRUE,则需要采用IEEE802.1AS规范下的报文格式,如果该参数为FALSE,则使用AUTOSAR规范下的报文格式。
该五类报文格式均由头信息格式,Paload格式,数据类型(TLV若有)组成,同一规范下的五类报文均具有相同的头信息格式定义。