S3C2440触摸屏驱动实例开发讲解
一、开发环境
主 机:VMWare--Fedora 9
开发板:Mini2440--64MB Nand, Kernel:2.6.30.4
编译器:arm-linux-gcc-4.3.2
二、前提知识
1、Linux输入子系统(Input Subsystem):
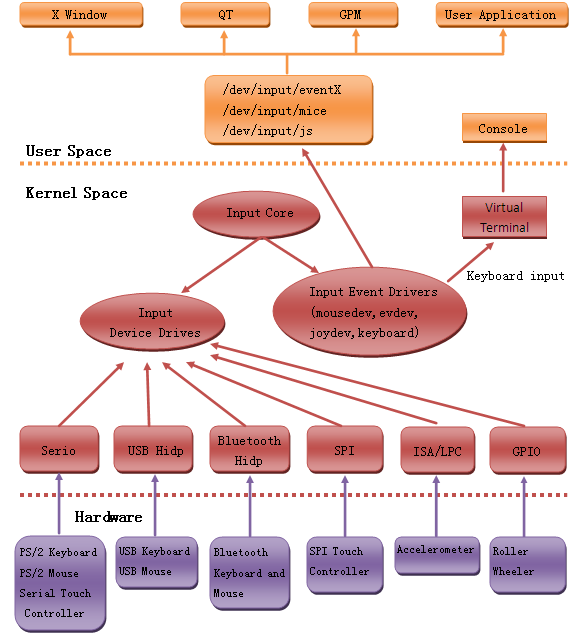
在Linux中,输入子系统是由输入子系统设备驱动层、输入子系统核心层(Input Core)和输入子系统事件处理层(Event Handler)组成。其中设备驱动层提供对硬件各寄存器的读写访问和将底层硬件对用户输入访问的响应转换为标准的输入事件,再通过核心层提交给事件处理 层;而核心层对下提供了设备驱动层的编程接口,对上又提供了事件处理层的编程接口;而事件处理层就为我们用户空间的应用程序提供了统一访问设备的接口和驱 动层提交来的事件处理。所以这使得我们输入设备的驱动部分不在用关心对设备文件的操作,而是要关心对各硬件寄存器的操作和提交的输入事件。下面用图形来描 述一下这三者的关系吧!
另外,又找了另一幅图来说明Linux输入子系统的结构,可能更加形象容易理解。如下:
2、输入子系统设备驱动层实现原理:
在Linux中,Input设备用input_dev结构体描述,定义在input.h中。设备的驱动只需按照如下步骤就可实现了。
①、在驱动模块加载函数中设置Input设备支持input子系统的哪些事件;
②、将Input设备注册到input子系统中;
③、在Input设备发生输入操作时(如:键盘被按下/抬起、触摸屏被触摸/抬起/移动、鼠标被移动/单击/抬起时等),提交所发生的事件及对应的键值/坐标等状态。
Linux中输入设备的事件类型有(这里只列出了常用的一些,更多请看linux/input.h中):
EV_SYN 0x00 同步事件 |
用于提交较常用的事件类型给输入子系统的函数有:
void input_report_key(struct input_dev *dev, unsigned int code, int value); //提交按键事件的函数 |
注意,在提交输入设备的事件后必须用下列方法使事件同步,让它告知input系统,设备驱动已经发出了一个完整的报告:
void input_sync(struct input_dev *dev) |
三、触摸屏驱动的实现步骤
1、硬件原理图分析:
S3c2440芯片内部触摸屏接口与ADC接口是集成在一起的,硬件结构原理图请看:S3C2440上ADC驱动实例开发讲解中的图,其中通道7(XP或AIN7)作为触摸屏接口的X坐标输入,通道5(YP或AIN5)作为触摸屏接口的Y坐标输入。在"S3C2440上ADC驱动实例开发讲解" 中,AD转换的模拟信号是由开发板上的一个电位器产生并通过通道1(AIN0)输入的,而这里的模拟信号则是由点触触摸屏所产生的X坐标和Y坐标两个模拟 信号,并分别通过通道7和通道5输入。S3c2440提供的触摸屏接口有4种处理模式,分别是:正常转换模式、单独的X/Y位置转换模式、自动X/Y位置 转换模式和等待中断模式,对于在每种模式下工作的要求,请详细查看数据手册的描述。本驱动实例将采用自动X/Y位置转换模式和等待中断模式。
注意:在每步中,为了让代码逻辑更加有条理和容易理解,就没有考虑代码的顺序,比如函数要先定义后调用。如果要编译此代码,请严格按照C语言的规范来调整代码的顺序。
2、建立触摸屏驱动程序my2440_ts.c,首先实现加载和卸载部分,在驱动加载部分,我们主要做的事情是:启用ADC所需要的时钟、映射IO口、初始化寄存器、申请中断、初始化输入设备、将输入设备注册到输入子系统。代码如下:
|
#include
/*用于保存从平台时钟列表中获取的ADC时钟*/ |
3、接下来要做的是,在两个中断服务程序中实现触摸屏状态和坐标的转换。先看代码,如下:
|
/*定义一个外部的信号量ADC_LOCK,因为ADC_LOCK在ADC驱动程序中已申明  [1] [2] [1] [2]
上一篇:(1)I2c的简介和特性 推荐阅读
(6)s3c2440用I2C接口访问EEPROM
在前面阅读理解了I2C的官方协议文档后,就拿s3c2440和EEPROM来验证一下. 本来是想用s3c2440的SDA和SCL管脚复用为GPIO来模拟的,但在没有示波器的情况下搞了一周,怎么都出不来,最后还是放弃了.甚至参考了linux下i2c-algo-bit.c和i2c-gpio.c,依然没调出来.如果有示波器,可能很快就能找到原因,现在完全不知道问题出在哪里.其实想用GPIO模拟I2C的目的很简单,以一种简单而又深刻的方式来理解I2C. 既然这条路暂时没法走,退而求其次,用s3c2440的I2C接口来访问EEPROM,只要按照datasheet的来做,基本上不用考虑时序咯. 从s3c2440和AT24
发表于 2023-06-19
linux 2.6.22.6 移植
板子是国嵌的 GQ2440 主要移植步骤参考 韦东山老师的《嵌入式linux应用开发完全手册》 1、下载内核,打补丁 2、是用config_ok 配置内核 3、在 include/asm-arm/mach-types.h 中修改 MACH_TYPE_S3C2440 的值为 1999 因为MACH_TYPE_S3C2440 对应的机器结构在 arch/arm/mach-s3c2440/mach-smdk2440.c 中定义 所以 要把这个文件编译进内核,所以配置中有:System Type - s3c2440 Machines - SMDK2440 4、在arch/arm/mach-s3c2440/mach-smdk2440.c
发表于 2023-06-15
LCD实验学习笔记(八):中断
s3c2440有60个中断源(其中15个为子中断源)。 31个32位的通用寄存器,6个程序状态寄存器。有6种工作模式(系统/用户模式,快中断模式,管理模式,数据访问中止模式,中断模式,未定指令中止模式)。每种模式都有16个通用寄存器和1(或2)个程序状态寄存器。 R15(pc)是程序计数器,R14(lr)是连接寄存器,在异常时自动保存pc备份,r13(sp)是栈指针寄存器。 CPSR是当状程序状态寄存器。其 为控制位, 为中断禁止位, 为快中断禁止位, 为CPU状态位, 为工作模式位。, 程序状态寄存器(PSR)的F位 设为1,禁用快速中断(FRQ)。 程序状态寄存器(PSR)的I位 设为1,禁用普通中断(IRQ)。 SPSR程序
发表于 2023-06-15
LCD实验学习笔记(九):UART
s3c2440包含三个通用异步收发器,可工作于中断模式或DMA模式。每个UART包含两个64字节的FIFOs用于接收和发送数据。可编程设置波特率、1或2个停止位,5/6/7/8个数据位和奇偶校验状态。 串口线一般是3条,TxD,RxD,Gnd,即发送线,接收线和地线。 数据传送之前,UART之间约定好传输速率(每位所占据的时间,其倒数沩波特率)、数据传输的格式(多少个数据位、是否使用校验位、奇校验还是偶校验、多少个停止位)。 发送数据时,CPU先将数据写入发送FIFO,UART会自动将FIFO中的数据复制发送移位器(Transmit Shifter)中,发送移位器将数据一位一位的发送到TxDn数据线上。接收则过程相反。 使
发表于 2023-06-15
nand flash相关
关于nandflash的说明,请参考其他。 现在先贴出来韦东山先生的代码,作我学习之用。 1 @************************************************ 2 @ File:head.s 3 @ 功能:设置SDRAM,将程序复制到SDRAM,然后跳到SDRAM继续执行 4 @************************************************ 5 6 .text 7 .global _start 8 _start: 9 @函数disable_watch_dog, memsetup, init_nand, nand_read_
发表于 2023-06-13
【Linux高级驱动】触摸屏驱动的移植
触摸屏驱动的移植 流程 注意:看框架图 1.添加input.c组件 Device Drivers --- Input device support --- Generic input layer (needed for keyboard, mouse, ...) 2.添加evdev.c组件 Device Drivers --- Input device support --- * Event interface 3.添加s3c2410_ts.c触摸屏驱动 修改driver/input/touchscreen/Kconfig config TOUCHSCREEN_S3C2410 tristate Samsun
发表于 2023-06-05
更多
小广播
热门活动
换一批
更多
设计资源 培训 开发板 精华推荐
最新单片机文章
最新视频课程更多
何立民专栏
单片机及嵌入式宝典
换一换
更多
相关热搜器件
更多热门文章
更多每日新闻
更多往期活动
厂商技术中心
TI 技术论坛 TI 在线培训 Qorvo 射频技术研习社
随便看看
 About Us 关于我们 客户服务 联系方式 器件索引 网站地图 最新更新 手机版 站点相关: 综合资讯 51单片机 PIC单片机 AVR单片机 ARM单片机 嵌入式系统 汽车电子 消费电子 数据处理 视频教程 电子百科 其他技术 STM32 MSP430 单片机资源下载 单片机习题与教程 词云: 1 2 3 4 5 6 7 8 9 10
电子工程世界版权所有
京B2-20211791
京ICP备10001474号-1
电信业务审批[2006]字第258号函
 京公网安备 11010802033920号
Copyright © 2005-2023 EEWORLD.com.cn, Inc. All rights reserved 京公网安备 11010802033920号
Copyright © 2005-2023 EEWORLD.com.cn, Inc. All rights reserved
|
 PLC原理与应用——罗克韦尔_Micro800_系列
PLC原理与应用——罗克韦尔_Micro800_系列 机器人驱动与控制及应用实例
机器人驱动与控制及应用实例 ADS高速电路信号完整性应用实例
ADS高速电路信号完整性应用实例
 2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
 北京航空航天大学教授,20余年来致力于单片机与嵌入式系统推广工作。
北京航空航天大学教授,20余年来致力于单片机与嵌入式系统推广工作。 


本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。