无刷电机驱动系统详解
来源: 电子工程世界
新闻行业新闻
驱动系统与无刷电机的特性有着密切的关系,人们已经采用各种方法来改善电机的可控性和特性。在本文中,我们将解释两种典型的驱动系统:方波驱动和正弦波驱动。
电机驱动系统
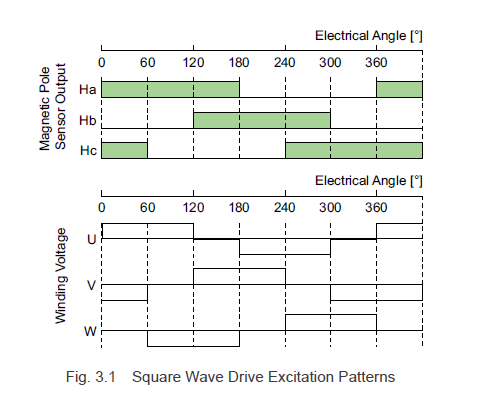
3.1.1 方波驱动系统(120°导通方式)
无刷电机驱动系统有很多种,120°导通方式的方波驱动就是一个常见的例子。如图 3.1 所示,该方法涉及根据霍尔效应 IC 输出信号的组合来切换激励状态。虽然在低速运行期间会出现速度纹波,但可以通过简单的电路实现高输出功率。因此,它被广泛用于控制办公自动化设备和功率设备的无刷电机。
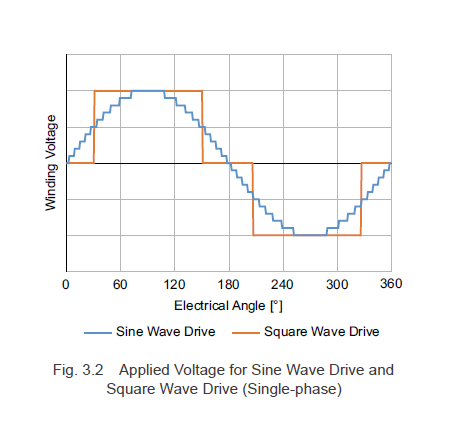
3.1.2 正弦波驱动系统
如图 3.2 所示,正弦波驱动系统是对施加电压进行精细控制,使电机电流呈正弦波的驱动系统。该驱动系统具有少量扭矩波动并允许稳定旋转。此外,它还降低了驱动电机时产生的噪音。
然而,为了进行正弦波驱动,需要准确地检测转子磁极位置。传统上,需要高分辨率编码器,但这有增加电机总长度和成本的缺点。
近年来,而不是使用编码器:
软件已用于处理霍尔效应 IC 信号。
已使用电机电感和反电动势进行检测。
因此,现在可以使用各种其他方法检测磁极位置并执行正弦波驱动。
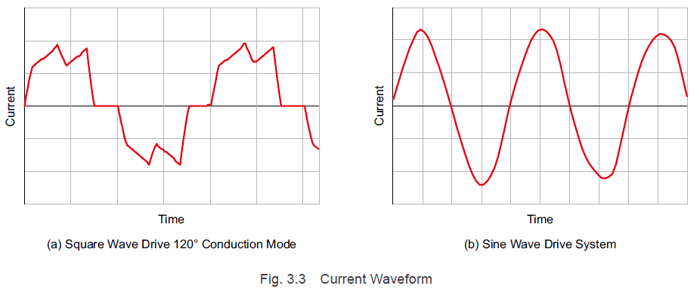
3.1.3. 每种驱动系统的电流波形
实际电流波形如图 3.3 所示。方波驱动器相对于施加的电压波形具有失真,实际上它在形式上比方波更接近正弦波。正弦波驱动器的波形类似于外加电压波形。
在接下来的几篇文章中,我们将解释驱动系统如何影响电机的性能。
文章来源于: 电子工程世界原文链接
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。