开关磁阻电动机的工作原理分析
开关磁阻电动机是一种基于磁阻调节原理的电动机,其工作原理与传统的永磁同步电机有所不同。
开关磁阻电动机的转子上装有多个磁极,转子和定子之间通过一定的磁阻进行耦合。在电机运行时,磁极随着转子的旋转不断进出定子,磁阻也会相应地发生变化。由于磁阻的变化会影响电机的感应电动势和电流,因此可以通过调节磁阻的大小和位置,来实现电机的转速和转矩的控制。
具体来说,开关磁阻电动机的定子上安装有多个磁阻器,可以通过控制磁阻器的开关状态,调节定子中的磁阻大小和位置。当电机工作时,电子控制器会根据需要的转速和转矩要求,控制磁阻器的开关状态,使定子中的磁阻大小和位置随之变化,进而调节电机的转速和转矩。
开关磁阻电动机的工作原理相比传统的永磁同步电机更为简单,结构更为紧凑。它还具有磁场稳定、抗干扰性能好等优点,适用于一些要求转速和转矩精度不高、结构紧凑、成本低廉的应用场景。
开关磁阻电动机调速系统所用的开关磁阻电动机(SRM)是SRD中实现机电能量转换的部件,也是SRD有别于其他电动机驱动系统的主要标志。SRM系双凸极可变磁阻电动机,其定、转子的凸极均由普通硅钢片叠压而成。转子既无绕组也无永磁体,定子极上绕有集中绕组,径向相对的两个绕组联接起来,称为“一相”,SR电动机可以设计成多种不同相数结构,且定、转子的极数有多种不同的搭配。相数多、步距角小,有利于减少转矩脉动,但结构复杂,且主开关器件多,成本高,现今应用较多的是四相(8/6)结构和六相(12/8)结构。
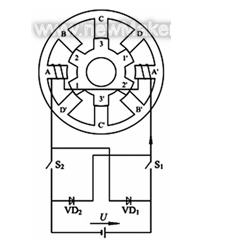
图1示出四相(8/6)结构SR电动机原理图。
为简单计,图中只画出A相绕组及其供电电路。SR电动机的运行原理遵循“磁阻最小原理”— ‘磁通总要沿着磁阻最小的路径闭合,而具有一定形状的铁心在移动到最小磁阻位置时,必使自己的主轴线与磁场的轴线重合。图2中,当定子D-D’极励磁时,1-1‘向定子轴线D-D’重合的位置转动,并使D相励磁绕组的电感最大。若以图中定、转子所处的相对位置作为起始位置,则依次给D→A→B→C相绕组通电,转子即会逆着励磁顺序以逆时针方向连续旋转;反之,若依次给B→A→D→C相通电,则电动机即会沿顺时针方向转动。可见,SR电动机的转向与相绕组的电流方向无关,而仅取决于相绕组通电的顺序。另外,从图1可以看出,当主开关器件S1、S2导通时,A相绕组从直流电源US吸收电能,而当S1、S2关断时,绕组电流经续流二极管VD1、VD2继续流通,并回馈给电源US。因此,SR电动机传动的共性特点是具有再生作用,系统效率高。
由此可见,通过控制加到SR电动机绕组中电流脉冲的幅值、宽度及其与转子的相对位置(即导通角、关断角),即可控制SR电动机转矩的大小与方向,这正是SR电动机调速控制的基本原理。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。