无刷直流 (BLDC) 电机的连接
无刷直流 (BLDC) 电机和控制器的接线没有既定的标准,因此,霍尔传感器和相位引线可能标记为 ABC、UVW,甚至根本没有标记。与其尝试分析电机以了解其定相,通过试错反复试验来确定正确的连接通常更容易。
由于三个霍尔传感器可以任意连接,因此有六种可能的电机相位引线连接方法(见表1)。
表 1:电机相位引线配置
| 配置1 | A-B-C |
| 配置2 | C-A-B |
| 配置3 | B-C-A |
| 配置4 | B-A-C |
| 配置5 | C-B-A |
| 配置6 | A-C-B |
在这六种相位接线组合当中,只有一种是正确的;与此同时,有三种连接会完全阻止电机转动;剩下两种不正确的连接也需要特别关注。如果电机以这两种不正确的方法连接,电机也会转动,但其性能会严重降级。
确定电机接线是否不当的三个关键因素为:扭矩、扭矩纹波和方向。在两种性能不佳的配置下,扭矩明显低于正确接线的电机扭矩,其扭矩纹波在电机转动时也会非常明显。最后,根据连接方式的不同,电机旋转的方向也可能不同。
找到使电机转动的三种接线配置是确定电机接线是否正确的最简单方法。我们可以比较电机在每种配置下的运行情况,正确的配置将具有最大扭矩和最低电流消耗。具体操作步骤如下:
给电机的三个霍尔输出线任意分配编号,然后将它们连接到评估板上的三个霍尔传感器输入端。
将霍尔传感器的电源电压和地连接至电源。
任意分配字母(如 A、B 和 C)给电机的相位线,然后将它们连接到评估板的三个相位输出上。
为评估板上电并启动电机。如果电机转动,则按照以下步骤查找最佳相位接线配置:
将每根相位线移动一个位置(例如A、B 和 C,然后变为 C、A 和 B),然后比较每种配置的扭矩和扭矩纹波。
将每根相位线再移动一个位置(C、A 和 B,然后变为 B、C 和 A),然后比较扭矩和扭矩纹波。
采用具备最高扭矩和最低扭矩纹波的接线配置。
如果电机不转,则调换任意两根相线,直到电机转动。
回到步骤3,比较使电机转动的三种接线配置,选择扭矩最高、电流消耗最低的配置。
如果电机转动方向与所需方向相反,则交换两条霍尔输入线,然后重复步骤 3 和 4。
另外,一旦电机旋转,就可以用示波器来观察相电压(或者相电流),以查看连接是否正确。 如果连接正确,相电压波形将近似对称(见图 1)。
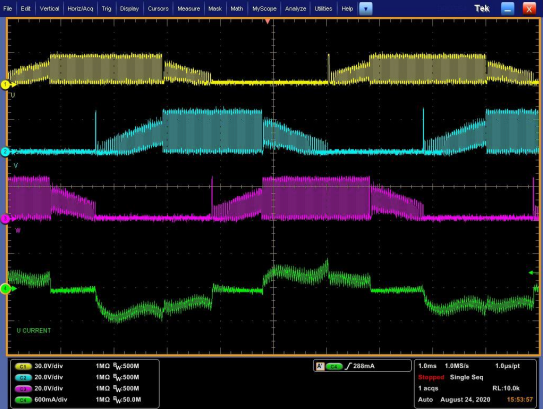
图 1:具有正确接线配置的相电压波形
如果相位连接不正确,则相位处于高阻抗、零电流状态的波形肩部看起来会非常不同。