异步电机模型预测转矩控制MPTC中的一拍延迟补偿介绍
一、异步电机模型预测转矩控制MPTC
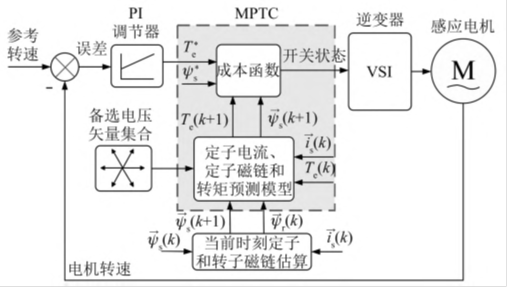
图1-1 异步电机模型预测转矩控制MPTC控制框图
由图(1-1) 可以看出,MPTC控制策略主要由有限控制集、预测模型、定子磁链观测器和价值函数组成。
其中,有限控制集是包含所有的备选开关状态的集合,两电平逆变器的有限控制集包含8种开关状态。
定子磁链观测器利用三相电流、电压的采样值和电机模型计算出当前时刻的定子磁链矢量值和位置,进而预测下一时刻定子磁链和转矩。
将预测值给到价值函数进行滚动优化寻优得到最优的电压矢量,把对应的开关序列给到逆变器完成控制。
二、一拍延迟补偿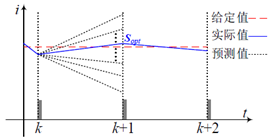
图(a)
如图(a)所示:在理想的情况下(忽略采样时间、计算时间),在k时刻与(k+1)时刻之间输出最优的开关状态Sopt,使得(k+1)时刻的实际输出转矩和磁链与给定值误差最小,从而实现对电机的转矩和磁链的跟踪控制。

图(b)
然而,相对于采样周期而言,实际工程中的采样和计算所消耗的时间往往不能忽略,如图(b)所示。采样和计算所消耗的时间使得根据k时刻的采样值进行预测计算并输出最优开关矢量Sopt时,并不能使(k+1)时刻的实际值与给定值之间的误差最小,造成转矩纹波偏大的问题。
显而易见,这种“先计算后输出”的方式不可避免地会造成实际的控制输出时刻发生延迟。为了消除延迟,采用一拍延迟补偿的方法(先输出再计算)的方式,对被控变量进行两步预测计算,如图(c)所示。
图(c)
两步预测计算的基本控制过程为:(1)输出在上一个采样周期中所计算存储的最优开关状态Sopt;(2)k时刻采样被控变量x(k);(3)结合和x(k),利用预测模型计算出(k+1)时刻的被控变量预测值x(k+1);(4)根据被控变量预测值x(k+1)以及预测模型,进一步计算出(k+2)时刻的被控量x(k+2)预测值;(5)然后将被控量x(k+2)的值代入到代价函数中进行滚动优化计算出使代价函数值最小的基本开关状态Sopt,即最优开关状态,存储最优开关状态等到下一个采样周期开始时刻输出。
三、仿真验证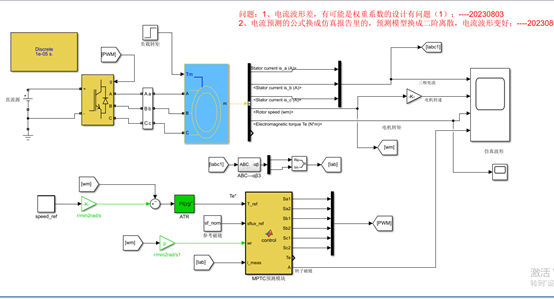
图3-1 异步电机模型预测转矩控制MPTC仿真系统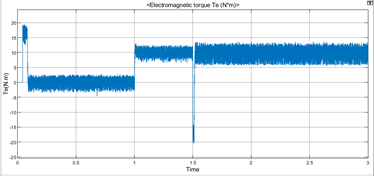
(a)无一拍延迟补偿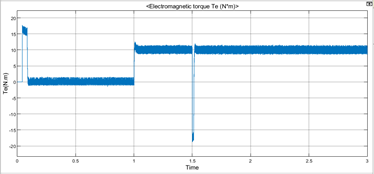
(b)有一拍延迟补偿
(c)系统整体仿真
图3-2 仿真波形变化的情况
从图(3-2)可以看出,加入一拍延迟补偿后的转矩纹波显著减小,系统的稳态性能得到明显改善。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。