童年的四驱车几乎是我们第一次近距离接触马达。想必有动手能力强一些的小伙伴还拆过,改装过马达吧。其实它就是一种结构标准的直流有刷电机(BDC)。
直流有机电刷的驱动方式
有刷电机的驱动是使用H桥来实现电机的无级调速的。

H桥原理图
如上图所示,4颗MOS管与马达共同组成一个形似H的结构。通过控制4颗MOS管的通断对电机进行驱动。
当A和D闭合,B和C断开时,直流电机正向旋转。
当B和C闭合,A和D断开时,直流电机反向旋转。
当A和C闭合,B和D断开,或者当B和D闭合,A和C断开时,直流电机不旋转。且因为短路产生反向电动势,所以抑制了电机的惯性旋转。
当A和B闭合或者C和D闭合,直接形成电源短路,会烧毁电源。
当A,B,C,D均处于断开状态,没有反向电势阻碍电机惯性运动。电机处于惯性运动状态。
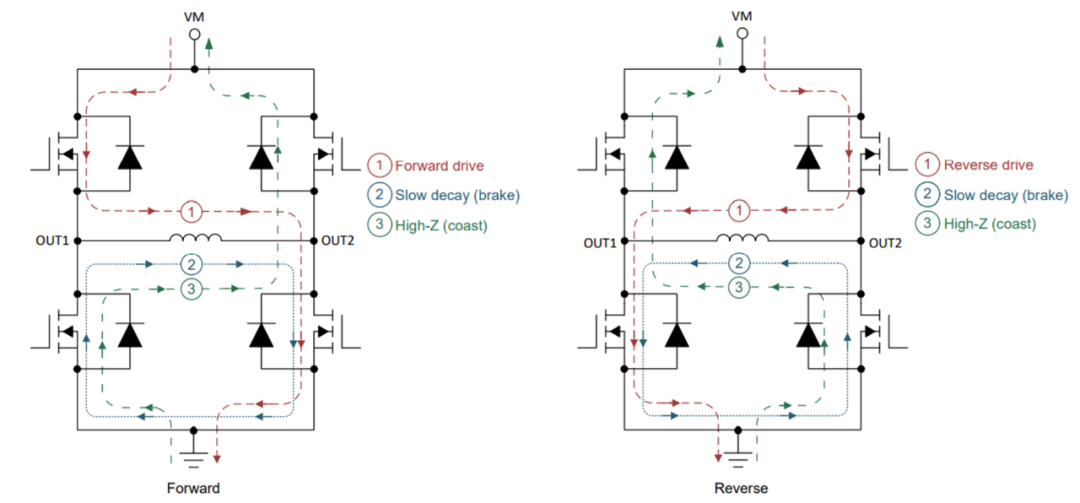
H桥电流路径

BDC电机驱动芯片功能框图
BDC驱动芯片,各厂家结构大同小异。接下来,以TI DRV8251A为例,简单介绍一下BDC电机驱动芯片。如上图所示,芯片内部集成了电压,电流检测,外部shunt电阻和集成电流镜,PWM控制接口,并集成保护电路。通过增加Charger Pump使得N-Channel MOSFET半桥以及100%占空比驱动来提高效率。
在IPROPI引脚上的采用内部电流镜结构实现电流的感应和调节。无需并联大功率电阻,节约板面积降低BOM成本。同时IPROPI电流传感输出给MCU可以检测电机失速或负载条件变化。
从四驱车到火星车
众所周知火星地表环境恶劣,地形复杂,对火星车驱动的灵活性要求极高。相对美国好奇号火星车的六只车轮中只能控制其中前后两对车轮独立转向,中国的祝融号火星车每只车轮都可以进行独立驱动和独立转向,在火星充满未知的极端环境下拥有更为优异的脱困性能,其中直流无刷电机功不可没。
直流无刷电机(BLDC)
无刷电机取消了电刷,采取电子换向,线圈不动,磁极旋转。通过霍尔传感器感知永磁体的位置适时切换线圈中电流的方向,确保产生正确方向的磁力驱动电机。因为没有电刷这个物理结构,无刷马达的寿命较有刷马达有了大幅提升。同样因为是电子换向,方便通过无刷电机控制器控制驱动器,可以实现调整电源切换角,制动电机,电机反转,锁止等功能,也使得无刷马达的控制精度较有刷马达大幅提升。所以,要求电池供电,大功率,大扭矩,小体积,长寿命,高精度的直流无刷电机就成为火星车驱动轮最合适的选择。

直流无刷电机的驱动方式
直流无刷电机(BLDC)的驱动电路主要是使用三相逆变电路实现的。而三相逆变电路的实现一般通过半桥MOS电路搭建。

通过控制Q1~Q6各MOS管的通断,驱动电机运转。
Q1,Q5打开,电流通过Q1→电机线圈AB相→Q5
Q1,Q6打开,电流通过Q1→电机线圈AC相→Q6
Q2,Q6打开,电流通过Q2→电机线圈BC相→Q6
Q2,Q4打开,电流通过Q2→电机线圈BA相→Q4
Q3,Q4打开,电流通过Q3→电机线圈CA相→Q4
Q3,Q5打开,电流通过Q3→电机线圈CB相→Q5
直流无刷电机的控制方式
相较简单的有刷电机的控制方式,无刷电机的控制方式就较为复杂了。主要有以下三种控制方式:
**1. **方波控制
方波控制使用霍尔传感器或者无感估算算法获得电机转子的位置,然后根据转子的位置在360°的电气周期内,进行6次换向。每个换向位置电机输出特定方向的力,所以方波控制的位置精度是电气60°。由于在这种方式控制下,电机的相电流波形接近方波,所以称为方波控制。优点是控制算法简单、硬件成本较低,使用性能普通的控制器便能获得较高的电机转速;缺点是转矩波动大、存在一定的电流噪声、效率达不到最大值。方波控制适用于对电机转动性能要求不高的场合。
**2. **正弦波控制
正弦波控制方式使用的是SVPWM波,输出的是3相正弦波电压,相应的电流也是正弦波电流。正弦波控制相比方波控制,其转矩波动较小,电流谐波少,控制起来比较精细,但是对控制器的性能要求稍高于方波控制,与方波控制,电机效率同样也不能发挥到最大值。
3. FOC控制
FOC(Field-Oriented Control)即磁场定向控制。正弦波控制实现了电压矢量的控制,间接实现了电流大小的控制,但是无法控制电流的方向。FOC控制方式是正弦波控制的升级版本,实现了电流矢量的控制,也即实现了电机定子磁场的矢量控制。这是目前无刷电机(BLDC)和永磁电机(PMSM)最高效的控制方法。
FOC对磁场的大小与方向的控制都更精确,从而使得电机运转的噪声更低,运转更平稳,动态响应更好。
TRINAMIC运动控制方案
说到FOC控制,就不得不提业界代表FOC控制天花板的TRINAMIC。
TRINAMIC的设计理念是尽可能将针对电机的运动控制硬件化,有效缩短开发周期,减少产品设计BOM(物料清单),缩短产品投放时间。

三路半桥分别驱动BLDC的三相UVW,Pre-driver集成传感和保护电路,可以根据FOC算法需要进行电流采样。Motion Controller专用运动控制器执行硬件驱动控制算法,降低MCU的运算负荷。
FOC****算法框图

电机三相电流ia, ib, ic电流产生定子磁场,和电机转子永磁体磁场相互作用让电机转动。为了让电机运转在最高效的模式,需要让定子磁场和转子磁场始终保持在一定角度,同时根据负载大小控制定子磁场大小。FOC控制重点就是控制电机定子的三相电流ia, ib, ic的大小和相位。
FOC常应用在家电变频控制和机器人的伺服控制。上图是通用的家电变频控制框图,只需要对速度做实时控制,所以最外部环路只有速度环,不需要位置环。
以下对上图中变频控制做简单讲解,FOC控制整个流程包括:
ia, ib, ic电流解耦:对采样的ia, ib, ic电流依次做Clarke变换和Park变换得到实时直流量id 和 iq。解耦过程是使电流相位互差120度的ia, ib, ic正弦电流最终变成 直流量id 和 iq。
电流环:因为电流解耦后有 id 和iq 两个实时直流量,所以需要2路电流环:d轴电流环和q轴电流环。电流环控制一般使用PI控制器。PI控制器包括参考输入和实时反馈输入。
◆ d轴PI控制:参考输入一般是0,实时反馈输入就是id,输出是d轴电压Vd
◆ q轴PI控制:参考输入来源于速度环的输出iq*,实时反馈入就是iq,输出是d轴电压Vq速度环:类似于电流环,需要参考目标速度We* 和实时转速We, We 目标转速是FOC控制以外给定的, 实时转速We可以通过位置估算器得到。速度环的输出iq 。
位置估算器:家电变频控制一般没有位置传感器,所以需要软件算法去估算,一般算法包括PLL锁相环方式 和 滑模控制, 核心都是软件建立电机模型去估算速度和位置。
电压反变换:转换Vd 和Vq到Va, Vb, Vc跟电流解耦刚好相反,从直流量转到相位差120度的三相正弦电压。
硬件开关管控制:通常使用SVPWM,是为了使三相电压Va, Vb, Vc映射到硬件开关管如何开通。
TRINAMIC的运动控制解决方案目前广泛应用于3D打印,家庭自动化,工业自动化,机器人和AVG小车,Lab automation,医疗健康设备,电动工具以及消费类产品等领域。
从TRINAMIC电机驱动与控制技术方案中,我们不难看出,日益增长的市场需求要求电机控制更加智能化。融合先进新兴产业,电机控制将更加精准可靠,数据处理能力更加强大。智能制造的发展正朝着边缘化方向演变,以加速推动工厂生产的自动、智能、高效。