如何利用官方移植例子,创建一个自己demo工程
之前挖了图解freeRTOS的坑,挖了坑就得填。今天就从使用开始,先把freeRTOS用起来。先聊一聊在STM32F407上的如何电灯,如果只用freeRTOS点灯,无疑有点杀鸡用牛刀的感觉。但是想用freeRTOS做产品,先照类似步骤则可以验证最小系统,验证freeRTOS是否能正确跑起来,再在此基础上开始做应用开发,就把任务分解了。本文主要梳理一下如何利用官方移植例子,创建一个自己demo工程,对于没用过的有点参考价值。
注:本文基于IAR for ARM 8.22.1(个人喜欢IAR),硬件采用正点原子的STM32F407探索者开发板,STLink V2。
准备工作
去官网https://www.freertos.org/a00104.html下载:

按图中所示下载,目前最新为202104.00,这个带多种移植好的例子。解压出来,是这样的:
tools为AWS iot配置工具,quick start例子以及cmake
FreeRTOS-Plus包含了MQTT,TCP,FAT等很多例子,先不去管
FreeRTOS为真正的操作系统源码以及多平台移植例子,如下:
使用开源软件,记得看看README,一般会有些介绍信息。分别介绍一下该文件夹下的大体内容:
Demo:大部分硬件平台的官方移植例子
Source:内核代码,包含硬件独立文件与可移植文件
Test:内核测试代码
license:MIT开源协议,可以直接商业应用。
建立工程
1.打开IAR,创建Workspace
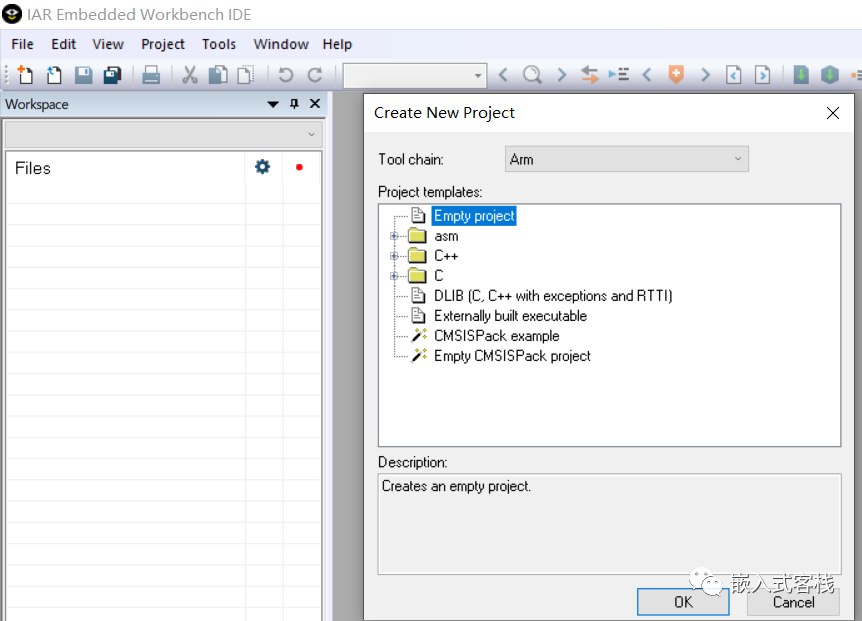
2.创建工程

选择空工程(Empty project),命名为demo保存。
-
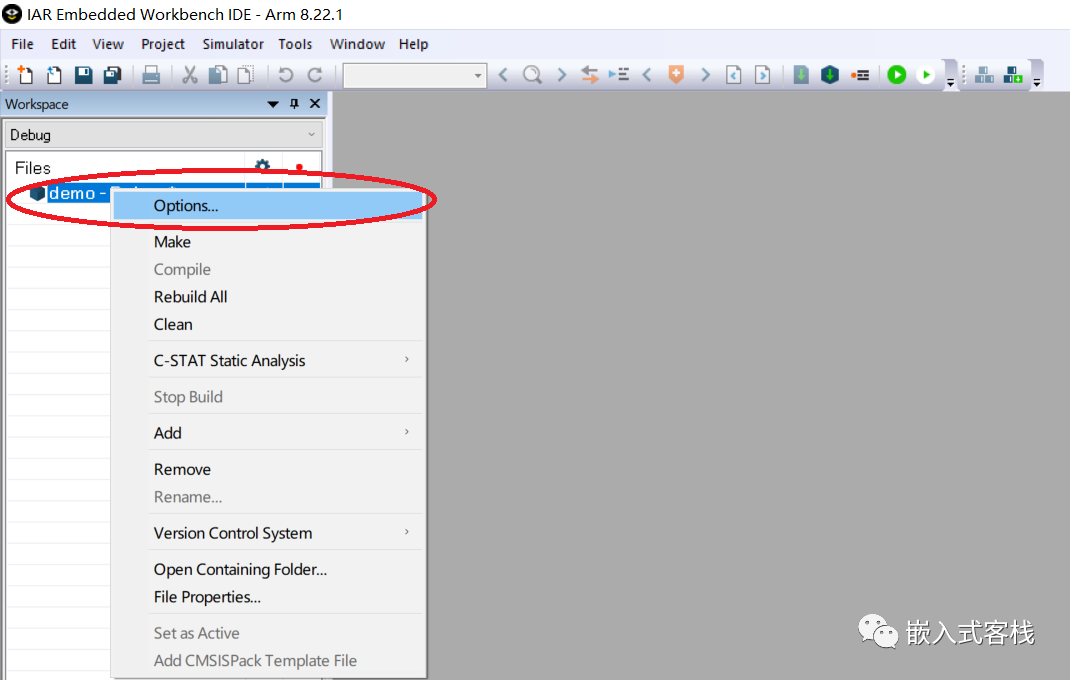
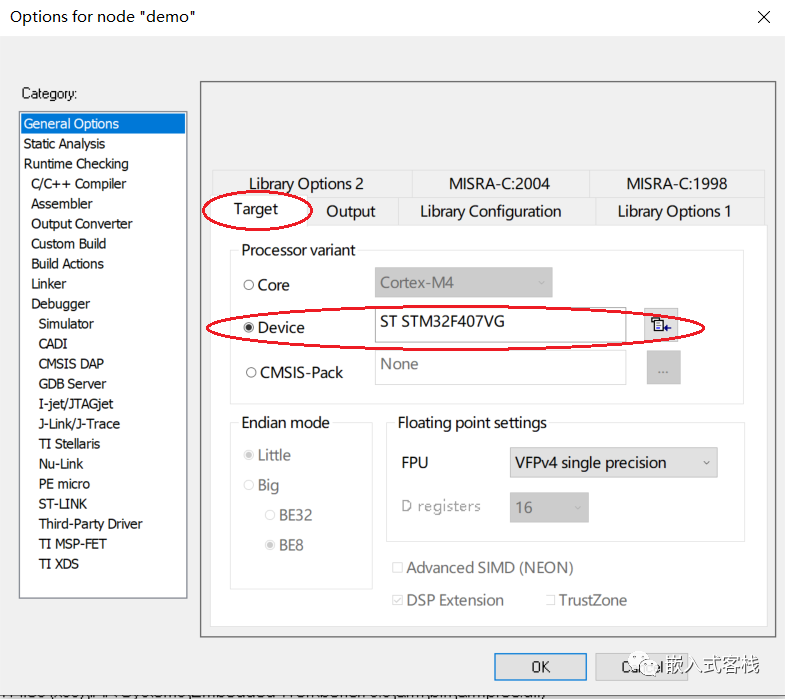
设置工程
右键选择Options,进入设置界面
设置单片机为STM32F407VG
Library Configuration使能CMSIS

-
添加源文件
4.1 新建freeRTOS文件夹
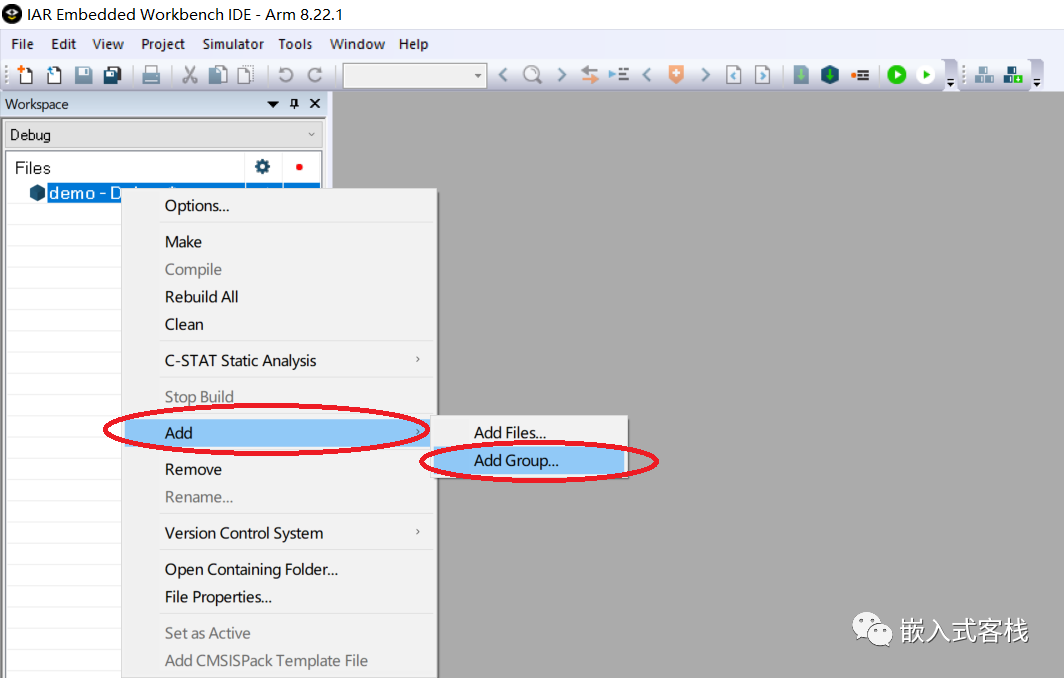
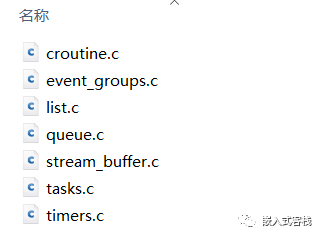
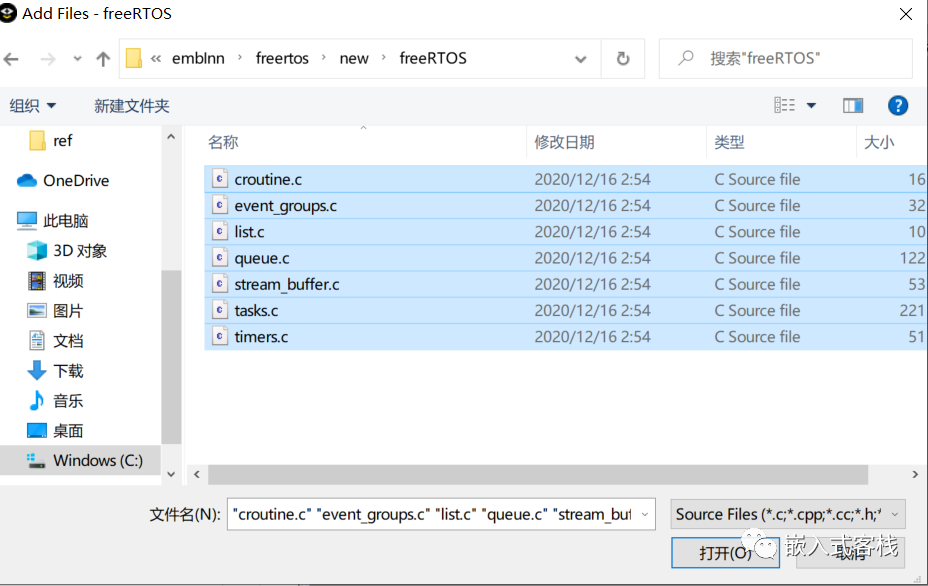
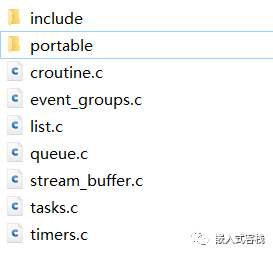
4.2 添加内核文件,在工程文件夹下新建freeRTOS文件夹,将下列文件拷贝过来
4.3 添加进IAR工程
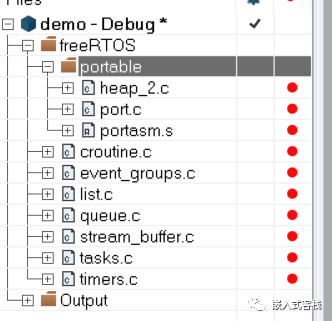
4.4 将freeRTOS下的include文件夹以及portable文件夹拷贝到当前工程下
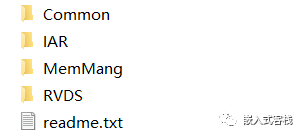
4.5 portable文件夹下保留下面这几个文件夹
4.6 IAR文件夹下保留下面这两个文件夹
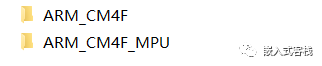
注:全保留也可以,就是其他的用不到,会使工程文件夹变的很大,如果用版本控制软件管理,会增加仓库的大小。ARM_CM4F_MPU文件夹暂时没用,这个留做备用。
4.7 在IAR工程中新建portable文件夹,并加入相应的文件
4.8 将下面几个文件从官方例子中拷贝过来,并加入工程

#defineconfigUSE_PREEMPTION1
#defineconfigUSE_IDLE_HOOK0
#defineconfigUSE_TICK_HOOK0
#defineconfigCPU_CLOCK_HZ(SystemCoreClock)
#defineconfigTICK_RATE_HZ((TickType_t)1000)
#defineconfigMAX_PRIORITIES(5)
#defineconfigMINIMAL_STACK_SIZE((unsignedshort)130)
#defineconfigTOTAL_HEAP_SIZE((size_t)(75*1024))
#defineconfigMAX_TASK_NAME_LEN(10)
#defineconfigUSE_TRACE_FACILITY1
#defineconfigUSE_16_BIT_TICKS0
#defineconfigIDLE_SHOULD_YIELD1
#defineconfigUSE_MUTEXES1
#defineconfigQUEUE_REGISTRY_SIZE8
#defineconfigCHECK_FOR_STACK_OVERFLOW0
#defineconfigUSE_RECURSIVE_MUTEXES1
#defineconfigUSE_MALLOC_FAILED_HOOK0
#defineconfigUSE_APPLICATION_TASK_TAG0
#defineconfigUSE_COUNTING_SEMAPHORES1
#defineconfigGENERATE_RUN_TIME_STATS0
/*Co-routinedefinitions.*/
#defineconfigUSE_CO_ROUTINES0
#defineconfigMAX_CO_ROUTINE_PRIORITIES(2)
/*Softwaretimerdefinitions.*/
#defineconfigUSE_TIMERS1
#defineconfigTIMER_TASK_PRIORITY(2)
#defineconfigTIMER_QUEUE_LENGTH10
#defineconfigTIMER_TASK_STACK_DEPTH(configMINIMAL_STACK_SIZE*2)
/*Setthefollowingdefinitionsto1toincludetheAPIfunction,orzero
toexcludetheAPIfunction.*/
#defineINCLUDE_vTaskPrioritySet1
#defineINCLUDE_uxTaskPriorityGet1
#defineINCLUDE_vTaskDelete1
#defineINCLUDE_vTaskCleanUpResources1
#defineINCLUDE_vTaskSuspend1
#defineINCLUDE_vTaskDelayUntil1
#defineINCLUDE_vTaskDelay1
将IDLE_HOOK/TICK_HOOK禁止了,先不去关注这两个功能。
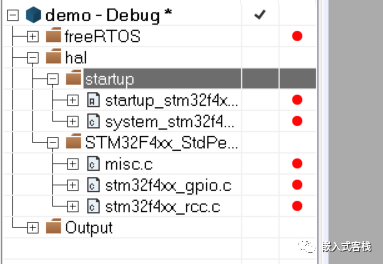
将STM32相关文件搬过来,如下加入到工程
-
建立main.c
正点原子的板子,有两个LED,我们就建立两个任务来闪灯吧,相当于hello world,容易理解。

/*操作系统头文件.*/
#include"FreeRTOS.h"
#include"task.h"
#include"timers.h"
#include"semphr.h"
#include"stm32f4xx.h"
//LED管脚
#defineLED1_PIN GPIO_Pin_9
#defineLED1_GPIO_PORTGPIOF
#defineLED1_GPIO_CLKRCC_AHB1Periph_GPIOF
#defineLED2_PINGPIO_Pin_10
#defineLED2_GPIO_PORTGPIOF
#defineLED2_GPIO_CLKRCC_AHB1Periph_GPIOF
staticvoidprvLedInitialise()
{
GPIO_InitTypeDefGPIO_InitStructure;
/*LED1时能时钟*/
RCC_AHB1PeriphClockCmd(LED1_GPIO_CLK,ENABLE);
/*LED1GPIO配置为输出*/
GPIO_InitStructure.GPIO_Pin=LED1_PIN;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType=GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(LED1_GPIO_PORT,&GPIO_InitStructure);
/*LED2时能时钟*/
RCC_AHB1PeriphClockCmd(LED2_GPIO_CLK,ENABLE);
/*LED2GPIO配置为输出*/
GPIO_InitStructure.GPIO_Pin=LED2_PIN;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType=GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(LED2_GPIO_PORT,&GPIO_InitStructure);
}
staticvoidprvSetupHardware(void)
{
/*配置时钟,PLL,FLASH*/
SystemInit();
/*配置NVIC优先级.*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
/*LEDGPIO配置*/
prvLedInitialise();
}
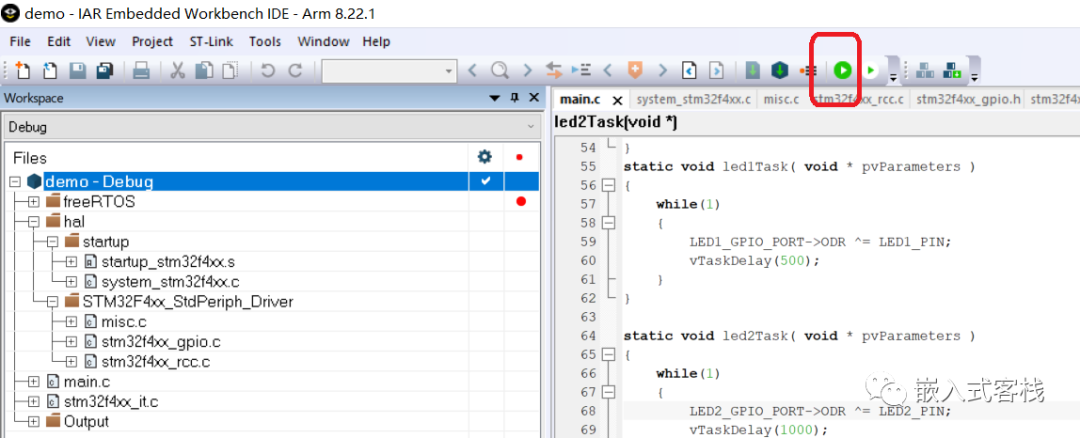
//500msLED1灯状态翻转一次
staticvoidled1Task(void*pvParameters)
{
while(1)
{
LED1_GPIO_PORT->ODR^=LED1_PIN;
vTaskDelay(500);
}
}
//1000msLED2灯状态翻转一次
staticvoidled2Task(void*pvParameters)
{
while(1)
{
LED2_GPIO_PORT->ODR^=LED2_PIN;
vTaskDelay(1000);
}
}
intmain(void)
{
prvSetupHardware();
xTaskCreate(led1Task,"LED1",256,NULL,100,(TaskHandle_t *)NULL);
xTaskCreate(led2Task,"LED2",256,NULL,101,(TaskHandle_t *)NULL);
/*启动任务调度器.*/
vTaskStartScheduler();
}
5.设置包含路径
5.1 右键打开options,设置C/C++编译器包含路径
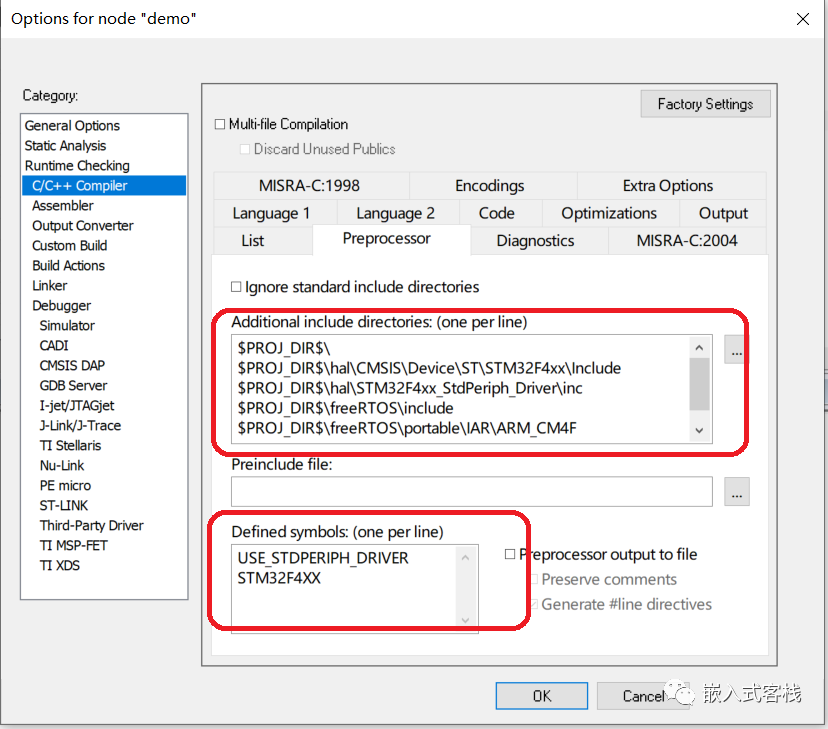
5.2 设置包含路径为:
$PROJECT_DIR$是一个变量,表示当前路径,不要设成绝对路径,否则拷贝到不同路径就无法编译了。
$PROJ_DIR$
$PROJ_DIR$halCMSISDeviceSTSTM32F4xxInclude
$PROJ_DIR$halSTM32F4xx_StdPeriph_Driverinc
$PROJ_DIR$freeRTOSinclude
$PROJ_DIR$freeRTOSportableIARARM_CM4F
$PROJ_DIR$Commoninclude示当前工程目录,利用这个变量就可以设置和工程相关的路径了,不要设置为绝对路径,否则如果工程拷贝到其他路径,就无法正确编译了。
并设置两个宏:
USE_STDPERIPH_DRIVER
STM32F4XX
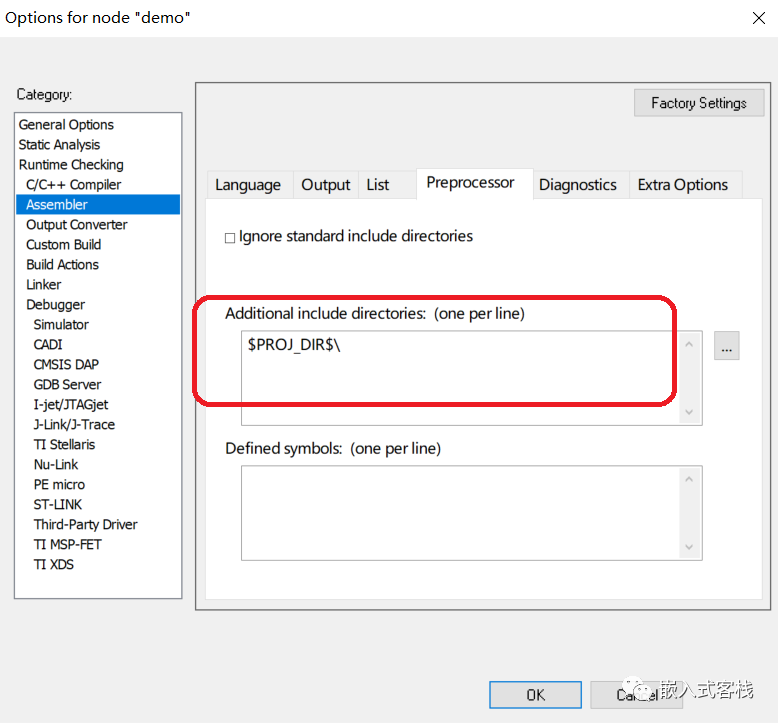
5.3 设置汇编器包含路径
6. 设置链接配置文件
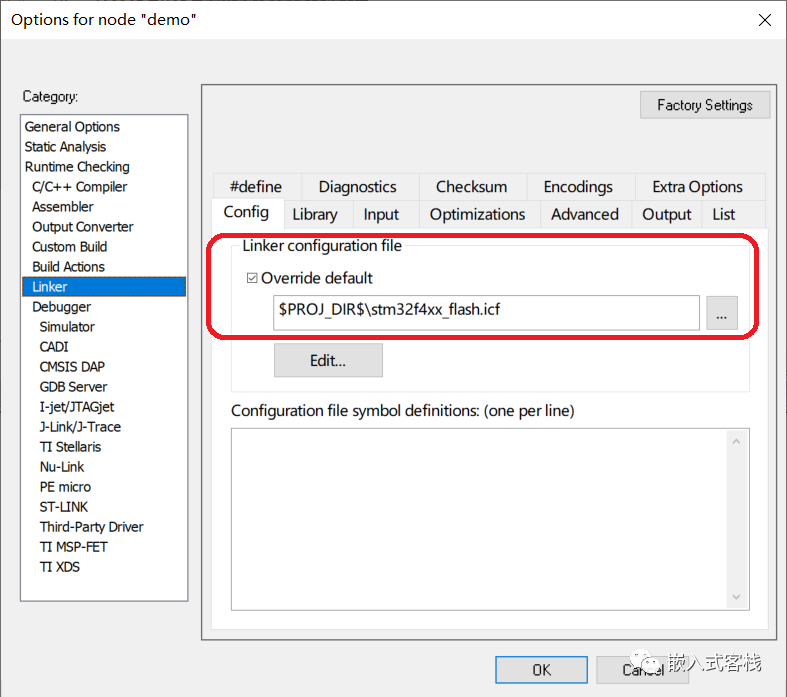
注:如果遇到下面的错误,应该是你使用了老版本的startup_stm32f4xx.s
Warning[25]:Label'CAN2_SCE_IRQHandler'isdefinedpubweakinasectionimplicitlydeclaredroot
官方例子中下面路径的startup_stm32f4xx.s为老版本
CMSISDeviceSTSTM32F4xxSourceTemplatesiar
该警告详细信息可参考:
https://www.iar.com/knowledge/support/technical-notes/assembler/warning25-label-xxxxx-is-defined-pubweak-in-a-section-implicitly-declared-root/
编译运行

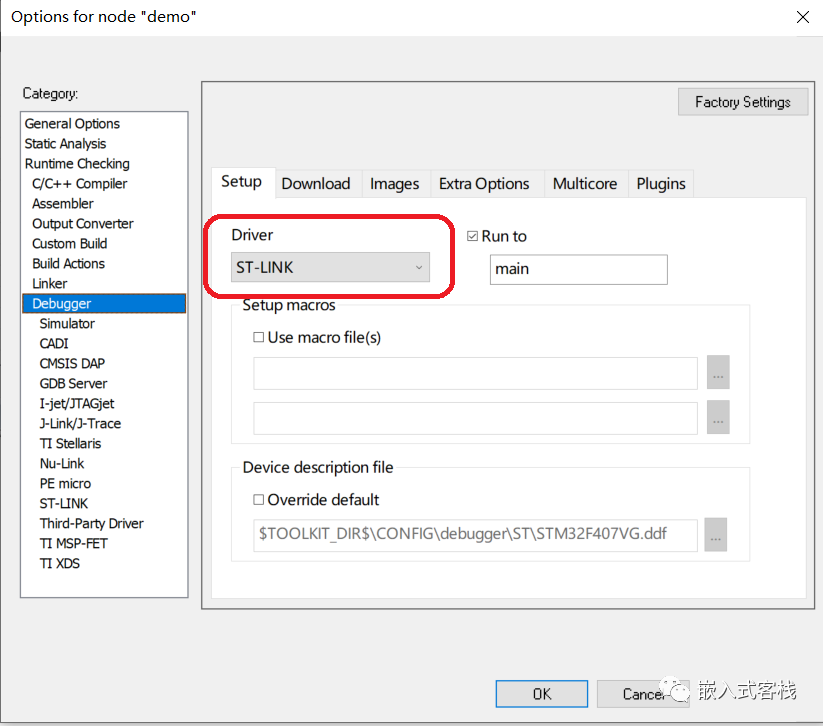
设置ST-Link
下载运行

闪灯效果
总结一下
官方的例子,要直接拿来开发产品有很多不需要的文件,可以按照本文的步骤做些删减,先建立这样一个基本工程,然后就可以结合自己的实际硬件以及需求,开始做应用开发了。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。