基于PMSM模型的电动汽车动力系统仿真方案简介
1、简介
永磁同步电机(Permanent Magnet Synchronous Motor),简称PMSM,是指一种转子用永久磁铁代替绕线的同步马达。
PMSM以永磁体提供励磁,使电动机结构较为简单,降低了加工和装配费用,省去了集电环和电刷,大大提高了电动机运行的可靠性;又因无需励磁电流,没有励磁损耗,提高了电动机的效率和功率密度。
目前国产的电动车都是基本上使用永磁同步电机提供动力,使用SaberRD软件可以完美实现电动汽车动力系统的仿真。本文从4个层次抽象了电动汽车动力系统。
仿真目标包括全局效率、长时间驱动的热分析、纳秒级的逆变器开关特性及损耗仿真。通过仿真可以优化电机和变频器控制参数,验证电能质量(THD和损失),并模拟故障。
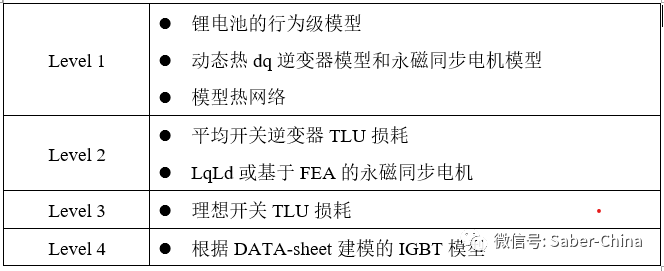
四层抽象级别主要包括:
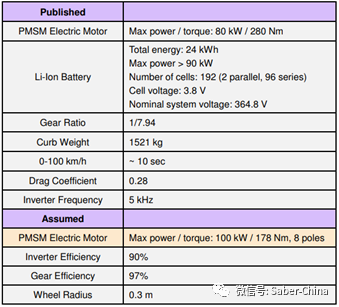
本文中涉及的所有器件特性是基于已公布的数据(详见表1)。
表1汽车动力系统参数
动力系统的设计核心是永磁同步电机模型,该模型参数包含空间谐波、磁饱和以及频率相关损耗。(见下图1)
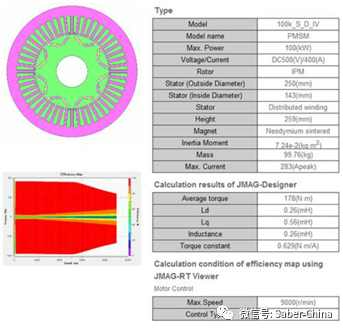
图1 电机参数
2、Level 1
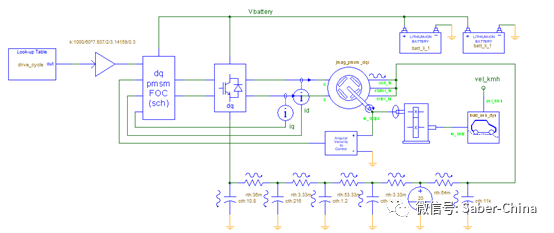
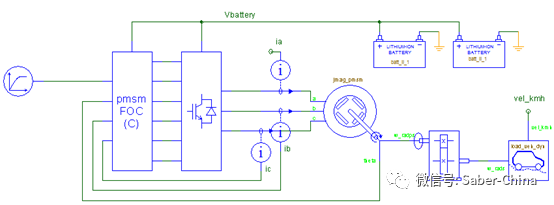
图2 汽车电机驱动系统仿真电路(Level 1)
层1抽象的电路仿真速度最快,用来仿真长时间运行的项目。在下图3中, 60s的仿真时间内可以完成实际运行时间为7小时(直到电池耗尽)的运行结果。电机和逆变器使用dq模型以达到最快的仿真速度。
dq模型(基于频域的)参数获取是通过使用平均技术分析电压的高频开关特性和电流的正弦性得到的基于相位和幅值的数据。这一层次的抽象,非常适用于仿真长期工作的热分析。
影响汽车多次充放电后的续航距离的因素是是逆变器和电机的损耗,而这个损耗可以准确地通过查找表获取。这些表格信息可以从IGBT模型或电机的FEA测试结果中获取。
电机和逆变器的损耗是频率相关的(逆变器开关频率和电机转动频率)。为了确保足够的电热耦合,逆变器损耗也和温度相关。这里电机模型中没有添加温度相关参数。
可以将逆变器和电机产生的热流连接到一个20℃的简易热网络。图3表示在周期持续驱动模式下实际速度,温度和电池电压波形。NEDC仿真最终能运行的距离为245km ,而厂商报告距离为200km。导致这一现象的原因是因为仿真模型中是100%理想的,没有损耗。(EDC的全称为:New European Driving Cycle,中文意思为“新欧洲驾驶循环周期”。我国使用的工信部续航里程标准就是欧洲标准。NEDC的续航里程测试主要模拟环境有市区和郊区,占比分别为4:1。因为实际路况环境影响因素较多,NEDC的测试基本为台架试验。)
通过设置瞬态仿真可以获得电机和逆变器的瞬态效率,并且绘制波形。信号名称plotting the signals instant_efficiency in vsi_dqx.vsi and jmag_pmsm_dqx pmsm:fea_pmsm_dqx.pmsm。逆变器的平均效率为79%,电机的效率为85%。
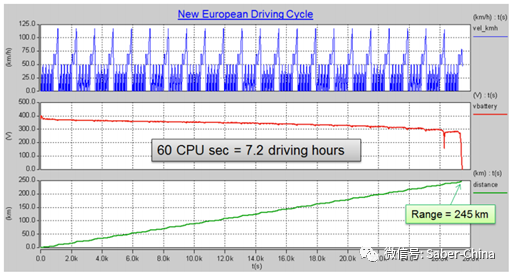
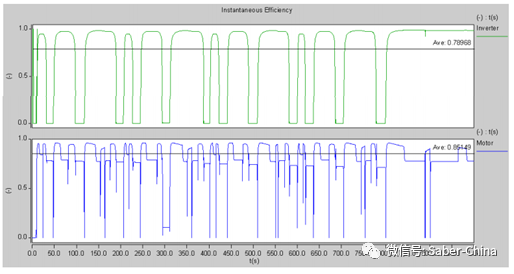
图 3 仿真结果
3、Level 2
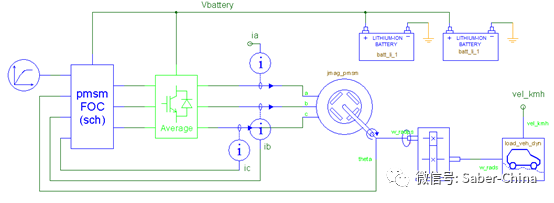
图4 汽车电机驱动系统仿真电路(Level 2)
层2电路,该层将层1的基于直流的dq坐标轴改为abc坐标轴,使用了非开关3相逆变器,产生同步正弦电压。Level 2电路仿真时间会变慢。因为周期性的正弦信号没有被抽象掉。但是电压是非连续的,要比脉宽是调制的Level 3电路快。Level 2电路是速度和精度之间的折衷,适合研究电机驱动电路。特别是可以观察通过电机空间谐波引起的转矩脉动。
图5,汽车在平路上从0到60nph加速时间约为10s。设置load_veh_dyn symbol的地形属性的值全部相等,能够达到平路上运行的效果。
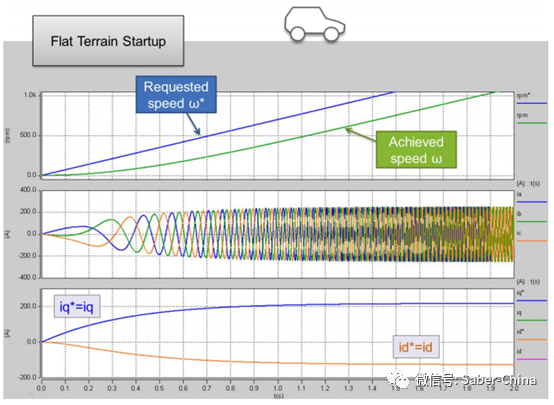
图 5 汽车平坦地形上的仿真结果
由上图可以看到,相电流的频率与汽车的速度是成正比的,电流矢量的id值是负值,符合MTPA公式。
图6表明,电机产生的反电动势在5s时被电池电压到极限,此后,电机处于弱磁控制模式,可以使速度进一步增加,但是理论值与实际值之间的误差会增大。仿真结果同时表明,电机电流在达到设置的最大300A后被MTPA算法限幅。

图6 弱磁控制模式
图7和图8表示的是在斜坡段的汽车动力仿真。在下坡段,汽车加速度超过了所设置的值,电机产生反向扭矩,暂时表现为发电机。在该点,能量通过动力学,磁,电和化学反应等将能量回流到电池中,当扭矩过零点时可以看到反向电流的变化。
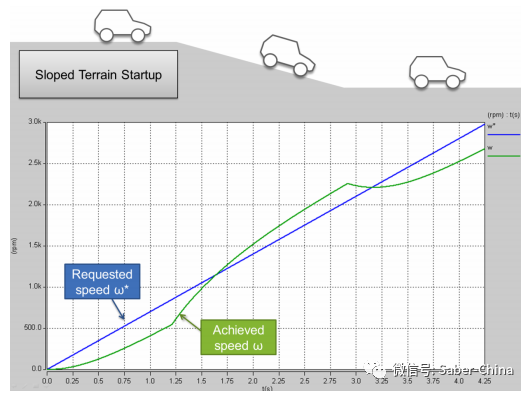
图7 斜坡地形上速度响应
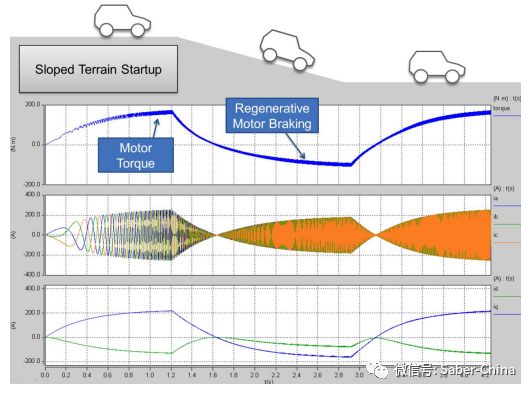
图8 斜坡地形上扭矩和电流相应
为了证明这点,改变load_veh_dyn symbol地形属性profile: [(0, 0), (1, 0), (10, -5)],再次进行仿真,观察波形。
值得指出的是为了获取dc工作点的参数,汽车的初始位置必须是无坡的。电机启动时是没有速度的,同时也不需要力矩。因为作用在汽车上力的平衡只能在没有重力时去计算,所以如果要修改坡度参数,请确保x=0时是平坦的。
4、Level 3
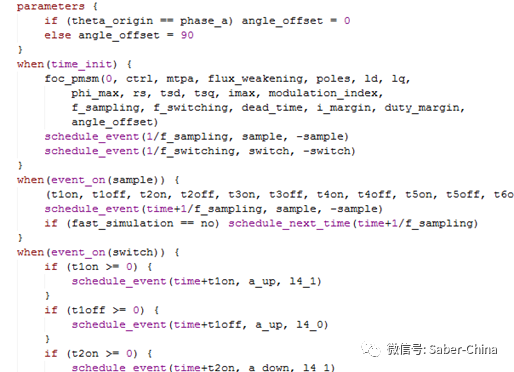
该层电路使用了pwm逆变器模型,仿真速度会更慢,控制算法使用mast语言实现。
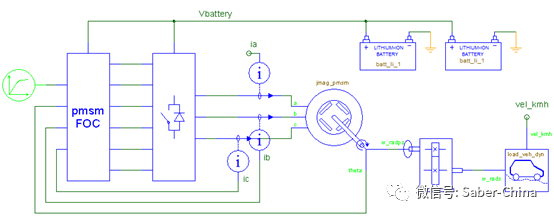
图9 汽车电机驱动系统仿真电路(Level 3)
Level 3抽象了 PWM逆变操作,使用了理想的开关模型和二极管模型,仿真速度比Level 2慢。但是比使用实际的半导体模型的Level 4要快一个数量级。
PMSM模板使用了MAST语言模板,使用采样信号替换了Level 2的连续信号。不同于Level 2输出使用占空比循环,这种方法促使逆变器开关逐渐消去,使得他更加接近于一个真正的MCU,尽管如此,Level 3大部分操作还是和Level 2的一样,包括派克变换和派克逆变换、MTPA、弱磁控制、PI集成和占空比计算。
控制系统不是通过异步中断触发开关装置,而是在每个开关周期的开始时控制12个开关装置(对于6个开关管,每个管子一次开一次关)。开关序列然后顺序排在仿真事件队列。在通信方案中,当系统在仿真外部FPGA、虚拟器等时,控制固定和相对长的时间间隔(200us)可以显著提高系统仿真性能,它允许开关事件可以暂时停止,但是没有大的损失。
如果不是用于协同仿真,系统的采样频率可以设置的高于开关频率,提高采样率可以使用kalman等滤波器对数据进行降噪,开关频率和采样频率开关切换时间主要是基于占空比,占空比是通过基于直流母线电压的电压合成的比例。
计算占空比时也包括用户指定的死区时间。死区时间是为了避免同时导通时,逆变器短路而定义的两个互补的IGBT同时导通关闭和开启之间一个很小的区间。死区时间一般为1到5us之间。
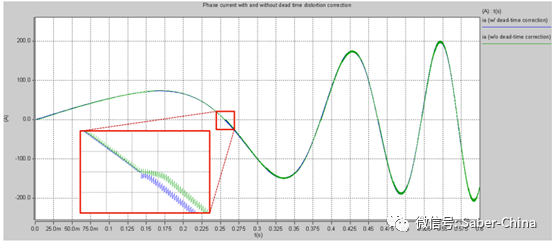
图10 矫正和未校正死区失真
图10所示的是,如果没有死区时间补偿,当一相电流过零(每个同步周期发生六次)时,死区时间引起的电流波形变化异常明显。波形异常会导致增加THD水平和电机铁芯损耗。在高频PWM时,由于死区时间是固定的(取决于IGBT内部开关速度),切换周期中死区所占的占空比会增大,其效果会恶化。在低速同步开下,死区时间的影响也比较明显。
死区时间的失真可以在电流的极性切换时刻进行校正调整。当IGBT的 同一条管脚都关闭时,相关的感应电流或者流经上续流二极管,或者流过下续流二极管。因为管脚的电流极性已经提前知道,所以可以提前知道相电压是去零电压还是母线电压,有助于提前增加或减少占空比。
需要注意的是,控制开关当同一管脚的开关同时动作时的死区时间,这只会发生在当电流等于零附近。高于和低于一定的安全裕度(FOC参数i_margin),一对开关中只有一个开关是对主动控制的。
5、Level 4
Level 4抽象模板是原理图底层电路,有着详细的逆变器电路。但是仿真速度最慢。这层的仿真速度是上层仿真速度的1/20。逆变器特性是根据Infineon IGBT datasheet用IGBT工具搭建的。
Level 4的FOC控制是使用C语言来实现的,但是实现功能与Level 3的mast语言是一样的。
Level 4,逆变器使用实际元器件搭建,FOC算法使用C编译器,c文件名称为pmsm.c,它与Level 3的实现原理完全一样。
5.1 Foc模块
从foc模型描述可以看到架构与Level 3的一样,只是算法调用了foc_pmsm.c文件。
5.2 逆变器
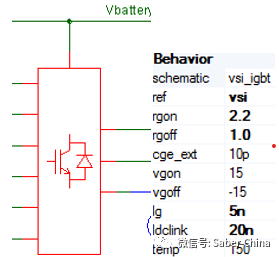
图11 逆变器及其参数设置
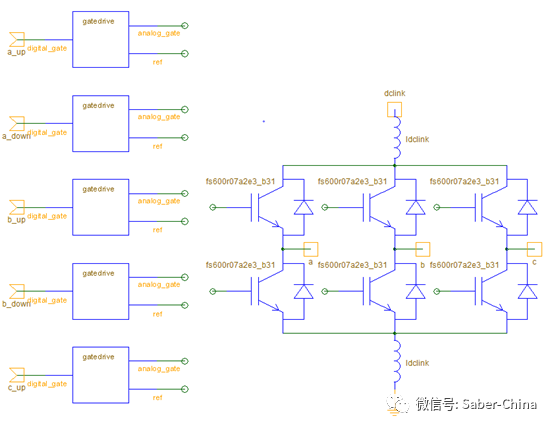
图12 逆变器模型宏电路
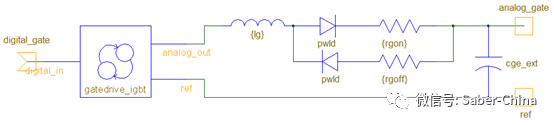
图13 IGBT控制器模型宏电路
6、总结
本文介绍了在电机设计的不同阶段中根据仿真精度和仿真速度的权衡,涉及了4种建模方法,它们的特点见下表:
dp模型提供最高仿真速度,可以有效地进行循环仿真。该模型可以评估整体效率,评估负载平衡,评估电机管理策略,分析长时间工作热仿真。
averaged PWM model适用于电机控制(FOC或DTC)优化,分析驱动动态范围,包括转矩脉冲和由电机缺陷引入的振动。
deal switch models适用于评估PWM方案(如正弦或空间矢量)和故障保护策略(熔断器,冗余逆变器等)
Detailed semiconductor models适用于评估逆变器的应力分析inverter stresses(最大dI/dt and dV/dt, 电压和电流尖峰current spikes);适用于设计开关速度和死区时间最优的门驱动电路;这一层的模型产生供上层模块调用的器件损耗表。

本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。