前言
目前自动驾驶技术处于高速发展的时期,L3逐渐进入量产阶段,L4/L5自动驾驶级尚处于开发和验证阶段,需要大量的路试数据做算法训练和验证。为了满足L4及以上算法训练和验证的需求,北汇信息提供路试数据采集设备并搭建数据采集平台,给客户提供一站式解决方案。典型客户,比如一汽南京,已经在高阶自动驾驶技术开发中进行应用。
数据采集平台可以为人工智能视觉摄像头、激光雷达、高精度定位等感知算法开发提供源源不断的数据,是自动驾驶算法开发及验证的必备工具。
传感器及采集设备选型
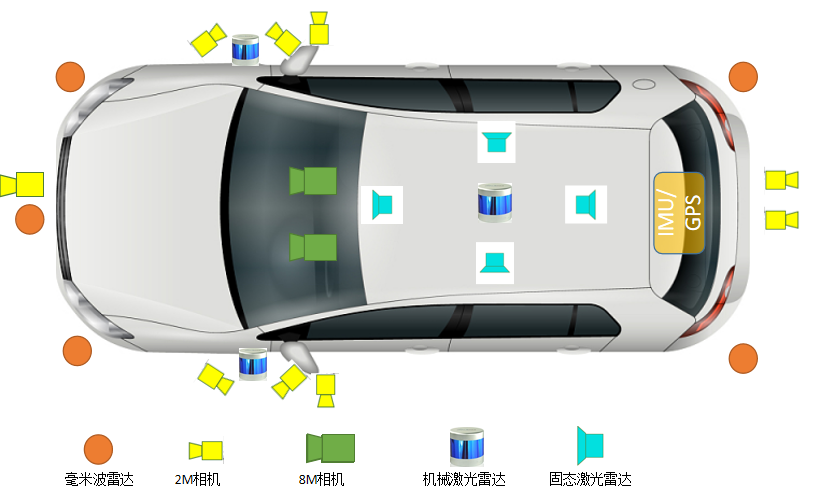
高阶自动驾驶需要用到的传感器主要有8MP前视双目摄像头、2MP环视摄像头、2MP/8MP周视摄像头、固态激光雷达、机械激光雷达、GPS/IMU/RTK、毫米波雷达等。典型的传感器配置和安装位置如下:
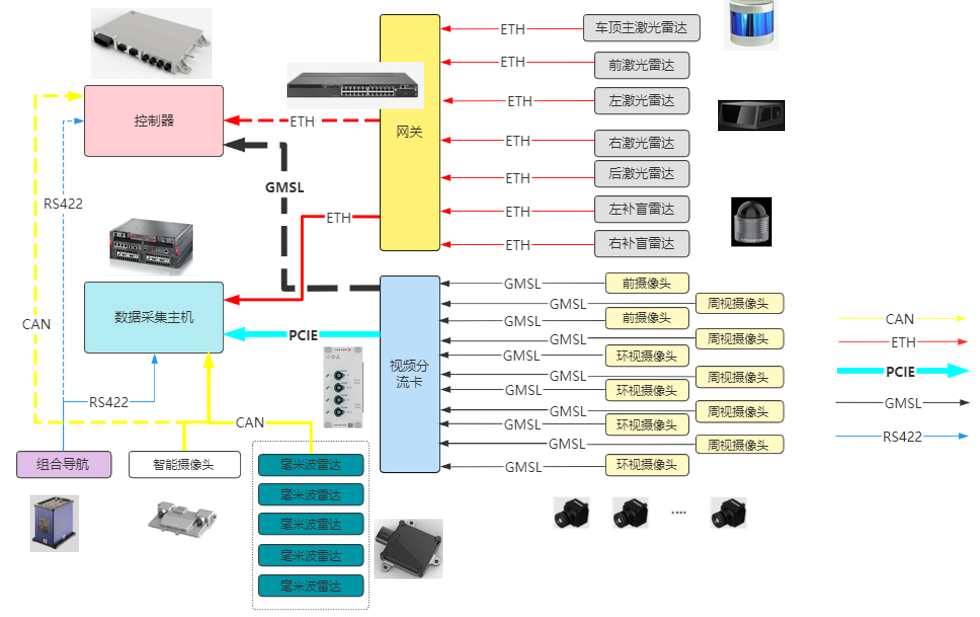
针对以上传感器型号选择对应型号的采集设备和采集主机;需要重点关注数据的存储带宽和摄像头的解串器和传输协议以及采集主机处理器性能。另外,数采系统在采集数据的同时需要提供数据分流通道,将传感器数据分流给控制器,在数据采集的同时不影响传感器和控制器之间的通讯。采集系统的数据路由如下图。多个激光雷达数据通过以太网经过网关传输到数据采集主机,摄像头数据通过GMSL传输给视频分流卡、分流卡将数据转发给ECU的同时传输到主机,由主机对数据进行转码和存储。毫米波雷达和智能摄像头的目标数据通过CAN/ETH总线传输到数据采集主机,组合惯导数据通过RS422/CAN/ETH传输到数采主机;主机上运行采集软件将所有传感器数据进行同步采集和存储,并提供必要的显示功能。
传感器安装位置及视场校验
传感器和采集设备选型完成后,根据采集平台数模和传感器数模对传感器安装位置和视场角进行校验,从而使传感器更好地发挥性能。实现对采集平台360°范围内的视觉图像信息、激光雷达点云信息采集,减少采集系统盲区。
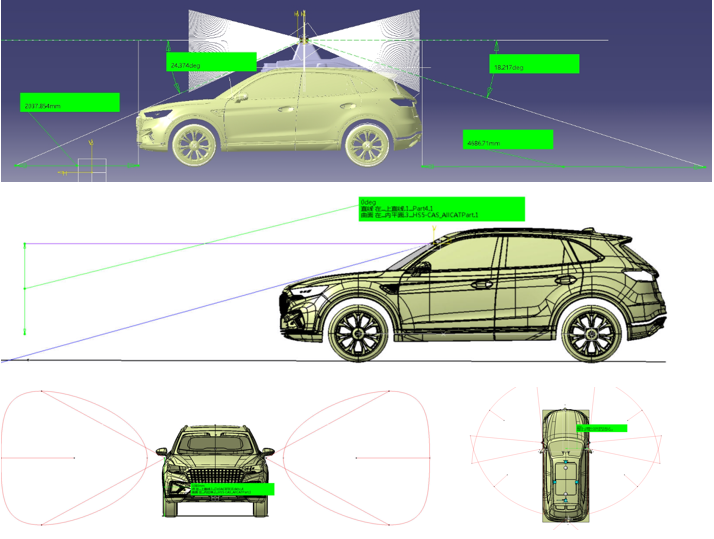
图.传感器安装位置和视场校验
支架设计
为了保证传感器的安装位置和角度,需要设计传感器支架;主要包括激光雷达支架、摄像头支架、天线支架、后备箱设备支架等。同时,为了保证支架安装时的位置和角度,还需要设计支架安装用的定位工装。
前视摄像头支架
周视摄像头支架
环视摄像头支架
固态激光雷达支架
补盲雷达支架
后备箱设备支架
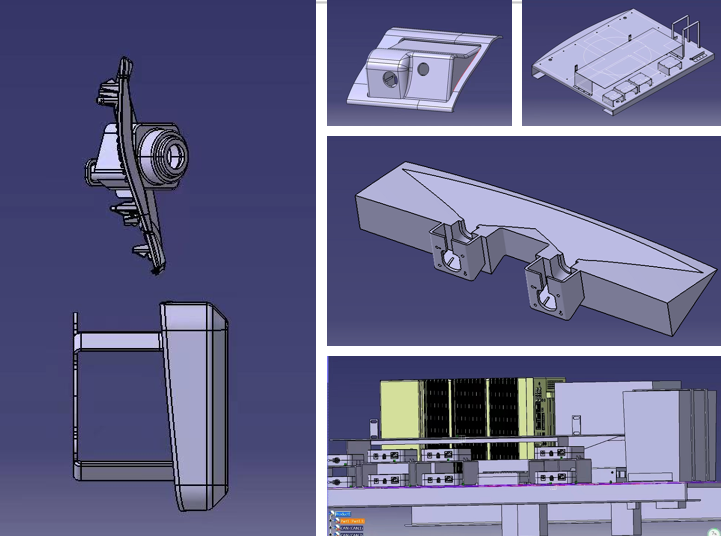
图.传感器和设备支架
设备安装和调试
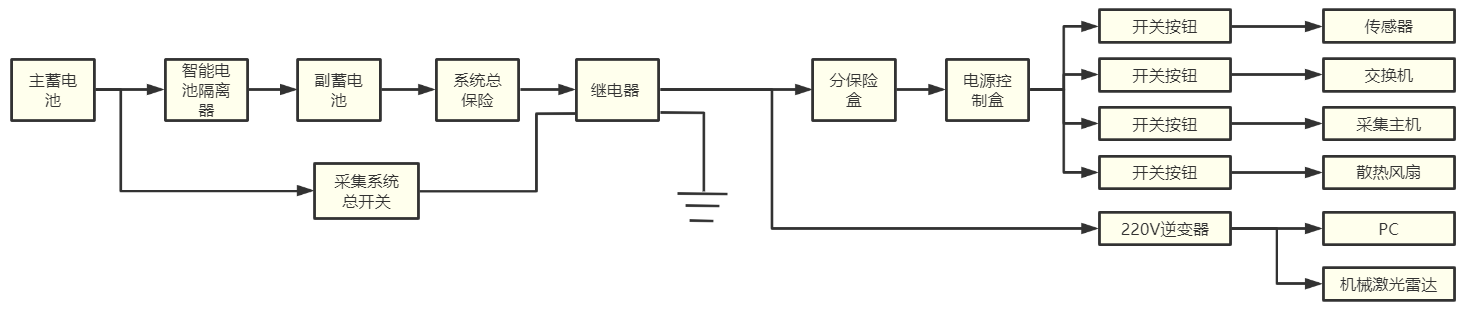
支架设计并制作完成后,就可以开始进行采集平台电气改装;需要给各传感器、采集主机和信号接口设备供电并获取传感器的输出信息。需要计算整个系统的总功率,选择合适的电源线束、保险盒、继电器和系统开关以及电源管理设备。
采集系统电源改装
电源系统需要加装智能双电池隔离器和副电池来保证电源系统的稳定性;另外还需要加装继电器、保险盒、开关按钮等附件。
视频信号线、激光雷达信号线、毫米波雷达信号线、惯导线束、CAN信号线束布置
传感器及支架安装
采集主机及显示终端安装
上电调试
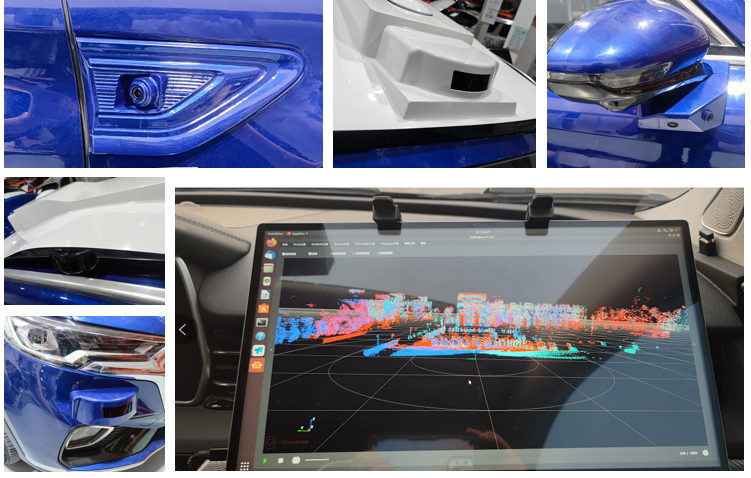
图.传感器安装和调试
传感器标定
传感器标定是自动驾驶数据采集非常重要的部分,也是多传感器融合的基础,自动驾驶首先需要通过标定来确定各传感器之间的坐标关系和各传感器与整车坐标系之间的转换关系。
传感器标定主要分为单传感器标定和传感器之间的标定。单传感器标定主要包括摄像头标定、激光雷达标定和惯导标定;传感器之间的标定主要包括摄像头与摄像头标定、摄像头与激光雷达标定、激光雷达与激光雷达标定。
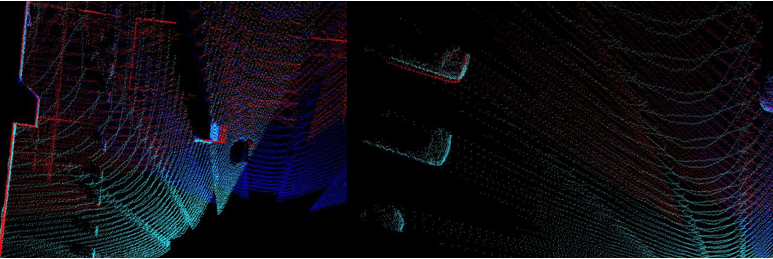
图.激光雷达标定
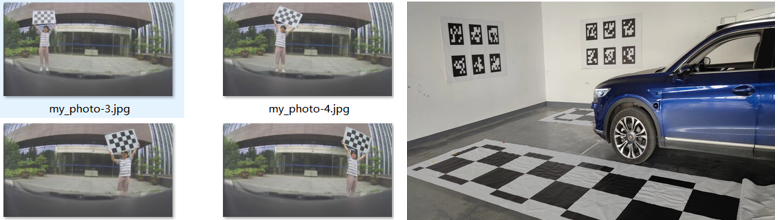
图.摄像头标定
时间同步
由于每个传感器都有自己的时间戳,为了保证各传感器的时间同步,需要对传感器和采集系统授时。整个系统由组合惯导获取GPS时间,并对时间同步服务器授时;然后由时间同步服务器通过PTP网关给激光雷达和采集主机授时,使整个系统使用同一个时间源(GPS时间);同时,时间同步服务器输出trigger信号去触发摄像头,控制摄像头的曝光时刻,从而实现所有传感器的数据同步。
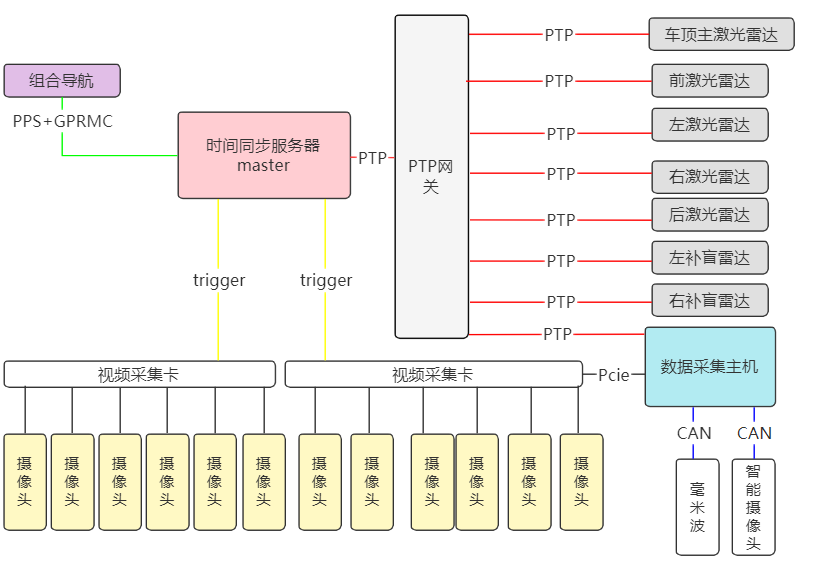
图.时间同步
总结
北汇信息不仅提供完整的路试数据采集硬件和软件,也可根据用户需求提供专业化的工程服务,包括硬件定制化配置安装,路试采集软件工程调试开发,为用户提供一站式解决方案,方便用户进行后续的自动驾驶算法验证。