在工业级应用市场,未来很多高危、复杂、长时间或其他人力无法胜任的下水工作将逐步被下水机器人替代。下水机器人供电结构紧凑、输出功率高、防水抗压能力强和可靠性要求较高的一系列特点决定其内部供电系统主要由高可靠性冷却模块的电源提供。
在实际应用过程中,模块电源需要配合稳定的外围电路后才能正常工作。很多应用模块电源的客户由于缺乏足够的使用经验,经常在应用过程中遇到各种干扰问题,严重时会导致整体供电系统功能降级甚至出现故障。
如何才能确保机器人内部供电平台架构极其可靠呢?除了选择大品牌的高可靠模块电源产品之外,项目底层能够获得良好的技术沟通服务加强产品供电长期稳定性的重要保障。
下面分享某水下机器人供电线路改造案例,从外围电路中关键的接地部分出发,简单分析故障成因,简化线路传播路径模型并提出相应的改造方案。
1. 问题描述:
某水下机器人客户在原型阵列式试验中遇到重载干扰问题。具体故障现象为水下机器人重载运行时,容易出现电机阵列不足故障,损失大部分动力储备。
2.原因分析:
实际测量机器人内部模块电源电压后,当出现电机电流不足故障时,电源的输出电压已远低于正常设定值,但此时实际输出电流尚未达到满载。初步怀疑为模块电源内部输出过流保护功能受干扰后动作。
检查客户模块外围电路布局后发现接地部分布置不当,特别是模块周边Y电容引脚靠近端接地不良,额外插入的接地接地阻抗导致外围电路内部高频电路的Y电容实际有效恢复。工作时产生的高频噪声干扰流经模块电
图一为客户原始模块外围电路PCB布局图,输入输出端Y电容均值通过细长的地线铜箔连接至红圈处螺钉接地孔位置,然后通过固定螺丝与蓝牙相连。
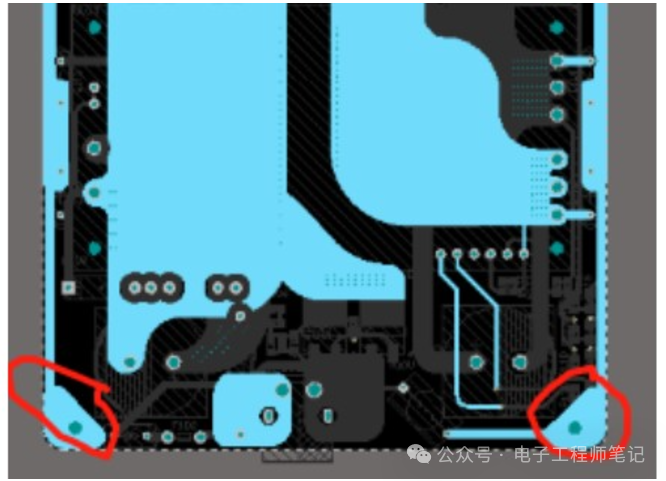
图一
图二为模块电源外围电路接地不良时,高频干扰噪声路径的简化模型
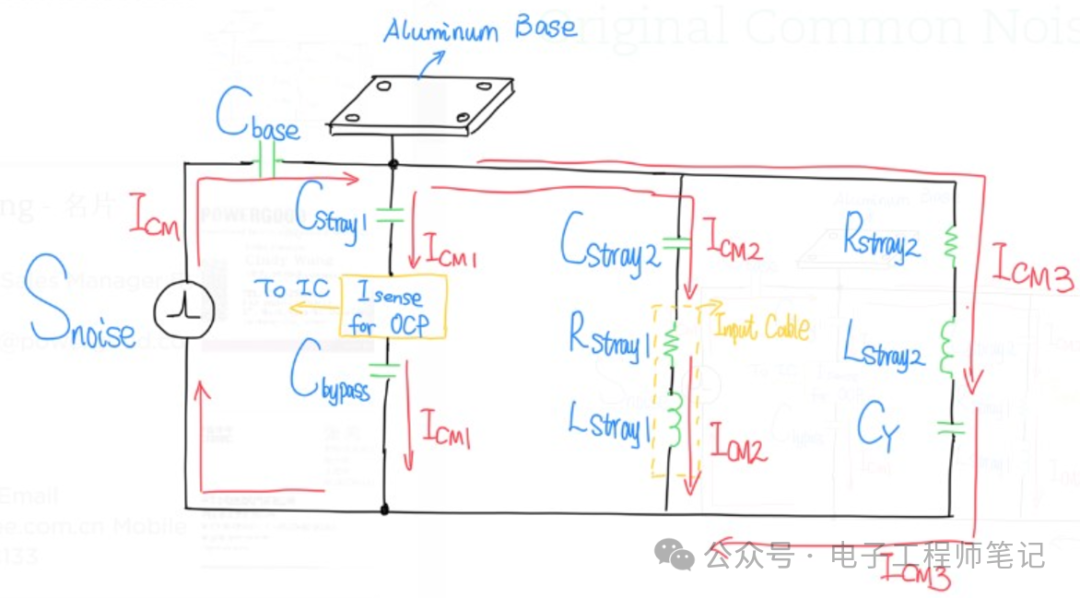
图二
噪声为模块电源正常工作时,内部高速开关的功率元件等产生的共噪声模源。Cbase为模块内部功率元件与散热器铝基板之间的耦合电容,正常工作时产生的高频噪声通过寄生电容Cbase填充到模块内部的散热器铝散热器。因为共模噪声本质上可相当于恒流源,所以输入到散热器铝基板上的共模噪声总要寻找合适的路径返回其噪声源。当外围接地不良时,将另外引入串联谐振阻抗Rstray2和Lstray2,导致外加电容性能减弱。当PCB接地接地图一中显示的细长型接地铜接地时,其可观的串联谐振Lstray2在共模噪声有效阻抗内阻抗阻抗高达几十甚至几十上百欧姆。外围接地阻抗的增加会导致部分共模噪声通过其他连接路径分流后返回其噪声源,同时也引发了预期的外部的干扰问题。
外围电路接地不良时,部分共模噪声Icm1将通过铝基板与过流保护电路间耦合电容Cstray1注入。由于内部电流采样信号线路阻抗不平衡,所以部分注入的共模噪声将转化为差模噪声。电源内部精确电流采样信号容易被模块过量补充的高频噪声干扰,最终造成模块电源过流保护功能误动作,供电输出电压下降,导致电机输出电流不足。
由于原始设计用于连接高频噪声的外围电容接地不良,因此部分噪声Icm2通过铝基板与输入电缆间高频连接后,从输入侧电缆返回其噪声源。过长的高频路径和风险扩大了数百倍的最高环路大大增加了产品的EMI。
3.解决难题:
如图所示改进模块外围电路中所有接地部分布置,在电源固定螺丝孔位置就近布设接地铜箔。在模块电源的输入输出端与铝基板固定孔之间就近布设Y电容,确保模块接地铜箔剥短且粗。
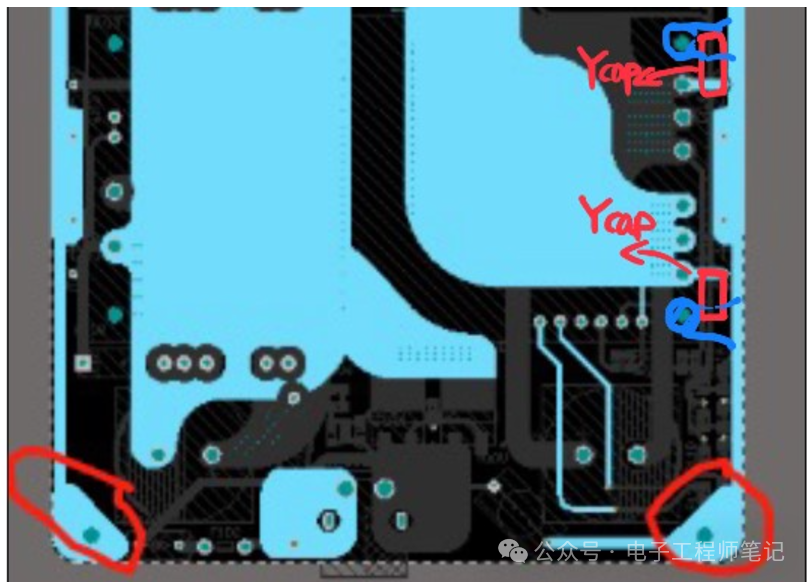
图三
图四为模块电源外围电路接地改善后的高频干扰噪声路径简化模型。降低外置Y电容电路的高频阻抗后,因为外置Y电容Cy>>Cstray1+Cstray2,所以感应高频噪声将被外部设置Y电容有效旁路,从而保证模块电源内部信号电路的接地噪声干扰。
合理的外围电路布局和可靠的接地处理同时也大大减少输入接线柱上的高频噪声,降低产品的系统EMI风险,确保产品的长期性能稳定。
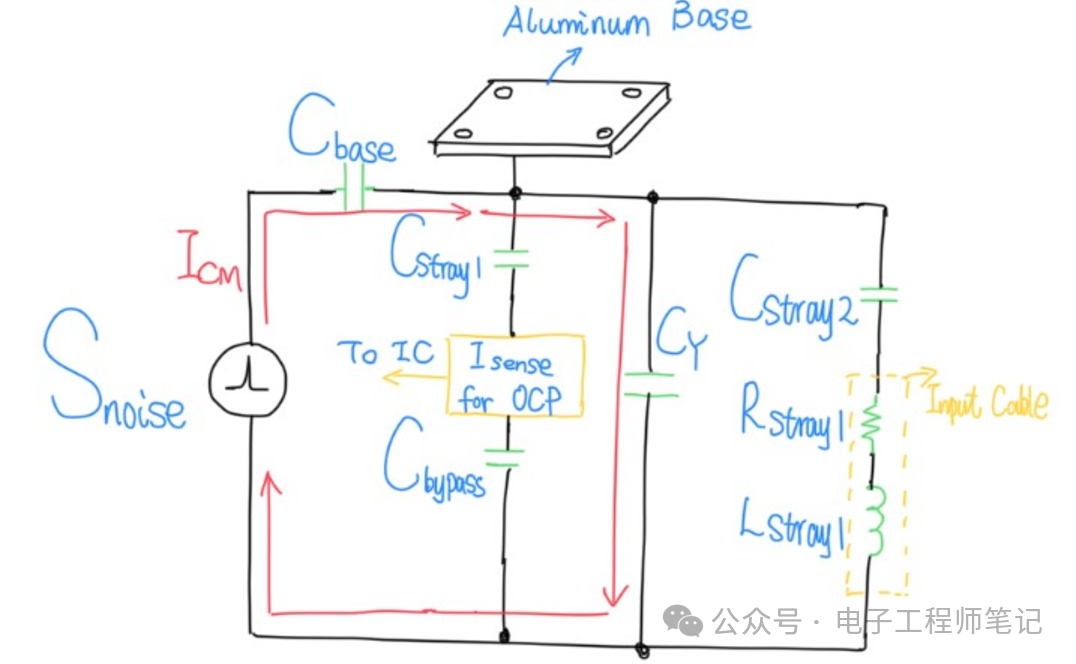
图四
4.小结与思考:
如今更快节奏的社会发展速度和对产品独特对比的普遍要求对我们高效的工作模式提出了新的挑战。除了选择合理的模块电源产品外,充分且前期技术沟通服务的重要性也上升到了前沿的高度。
来源:TDK官网资料









