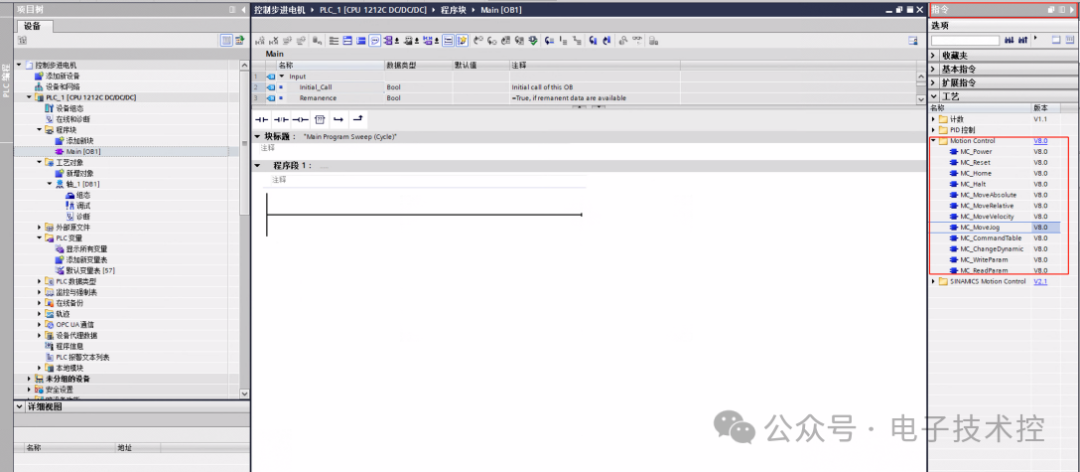
将硬件组态配置完成后就可以对控制逻辑进行编程组态了;首先在主程序中点击指令选项,点击工艺,点击“Motion Control”,对下方的指令进行调用。如图14所示,常用的指令有:
1.MC_Power用于轴使能,启用或者禁用轴;
2.MC_Rest用于轴复位,确认故障,重新启动工艺对象;
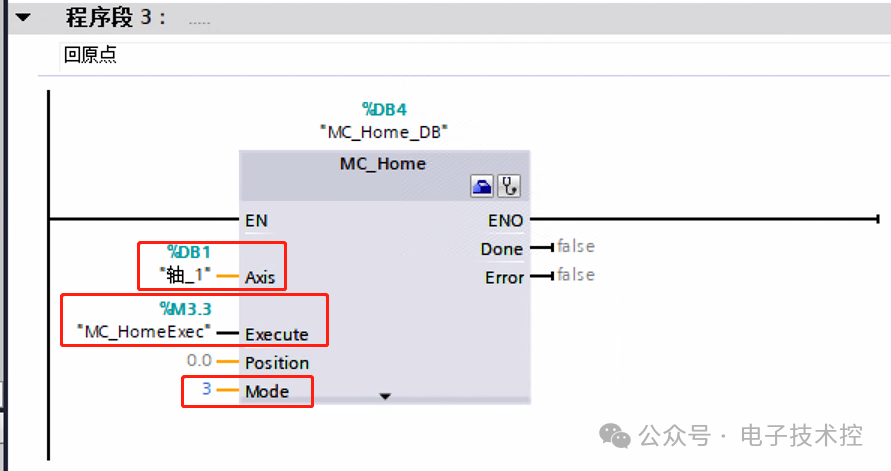
3.MC_Home用于回原点,使轴归位,设置参考点;
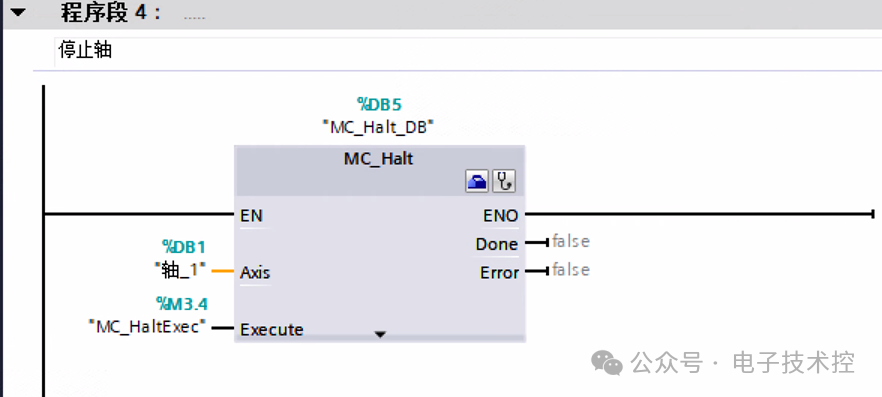
4.MC_Halt用于停止轴;
5.MC_MoveAbsolute用于以绝对定位的方式来控制轴,是基于原点位置来定位轴;
6.MC_MoveRelative用于以相对位置的方式来控制轴,是基于启动位置来定位轴;
7.MC_MoveVelocity用于以设定的速度来控制轴,是基于指定的速度连续移动轴;
8.MC_MoveJog用于点动轴移动,在点动模式下以指定的速度连续移动轴。
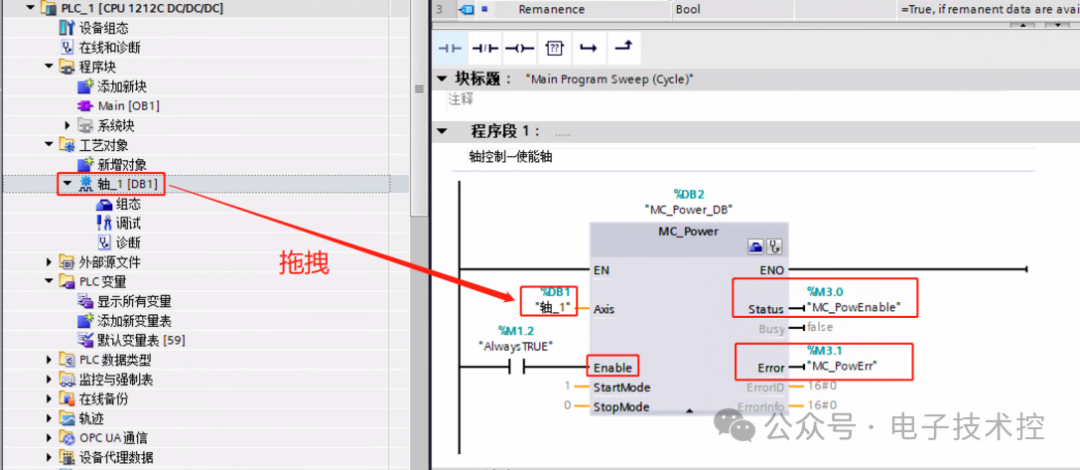
在编程页面,将MC_Power指令拖入程序段中,对MC_Power指令进行组态,Axis引脚处填写轴工艺对象,直接将左侧工艺对象“轴_1”拖拽到此处即可;Enable引脚是指轴使能,此处选择常闭就行,也可以可以根据实际情况填写;Status引脚处填写轴的状态,本次测试填写M3.0;Error引脚处填写错误状态,本次测试填写M3.1;其余引脚根据实际情况填写,也可以不填写,本次测试选择不填写;具体的使用方法可以按F1进行查看,程序如图15所示。
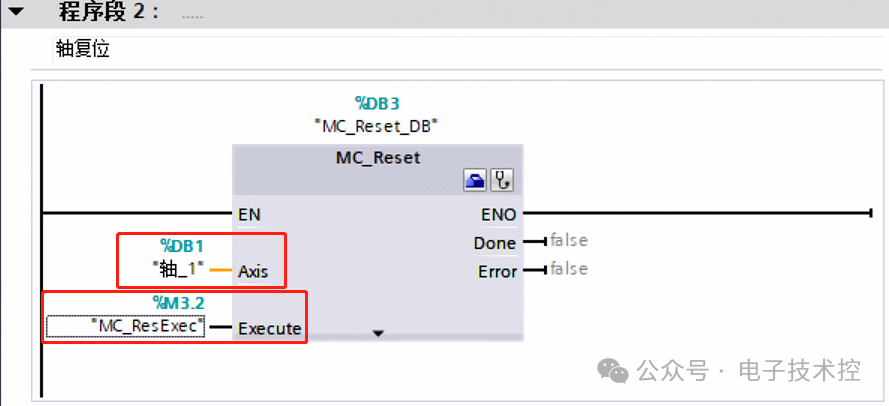
将MC_Reset指令拖入程序段中,对MC_Reset指令进行组态,Axis引脚处填写轴工艺对象,直接将左侧工艺对象“轴_1”拖拽到此处即可;Execcute引脚处填写轴复位控制点,此处填写M3.2;其余引脚根据实际情况填写,也可以不填写,本次测试选择不填写;程序如图16所示。
将MC_Home指令拖入程序段中,对MC_Home指令进行组态,Axis引脚处填写轴工艺对象,直接将左侧工艺对象“轴_1”拖拽到此处即可;Execcute引脚处填写轴回原点控制点,此处填写M3.3;Mode引脚处填写的是回原点模式,本次测试选择3(主动回原点),其余的功能可以详见F1帮助;其余引脚根据实际情况填写,也可以不填写,本次测试选择不填写;程序如图17所示。
将MC_Halt指令拖入程序段中,对MC_Halt指令进行组态,Axis引脚处填写轴工艺对象,直接将左侧工艺对象“轴_1”拖拽到此处即可;Execcute引脚处填写停止轴控制点,此处填写M3.4;其余引脚根据实际情况填写,也可以不填写,本次测试选择不填写;程序如图18所示。
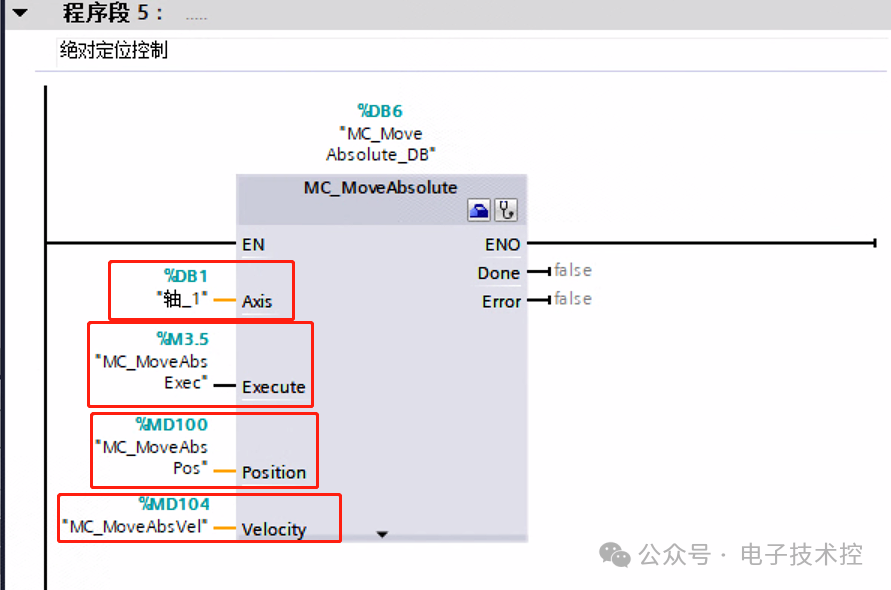
6.MC_MoveAbsolute指令编程(轴的绝对定位)
将MC_MoveAbsolute指令拖入程序段中,对MC_MoveAbsolute指令进行组态,使用此指令必须存在一个原点,首先需要回到原点,有一个参考值才可以进行绝对运动;Axis引脚处填写轴工艺对象,直接将左侧工艺对象“轴_1”拖拽到此处即可;Execcute引脚处填写启动绝对控制控制点,此处填写M3.5;Position引脚处填写轴移动的目标位置,可以是常数也可以是变量,本次测试填写变量;Velocity引脚处填写以绝对定位启动时轴的运行速度,可以是常数也可以是变量,本次测试填写变量;其余引脚根据实际情况填写,也可以不填写,本次测试选择不填写;程序如图19所示。
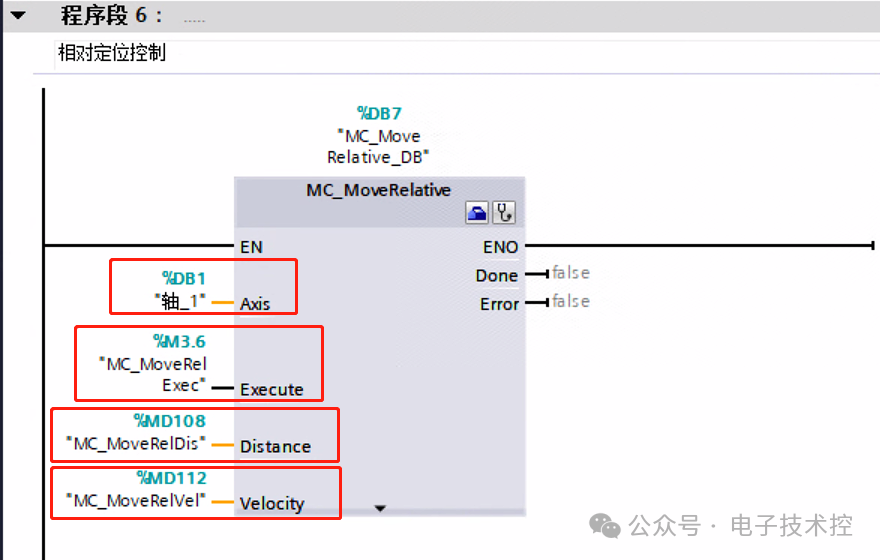
7.MC_MoveRelative指令编程(轴的相对定位)
将MC_MoveRelative指令拖入程序段中,对MC_MoveRelative指令进行组态,启动相对于起始位置的定位运动;Axis引脚处填写轴工艺对象,直接将左侧工艺对象“轴_1”拖拽到此处即可;Execcute引脚处填写启动相对位移控制点,此处填写M3.6;Distance引脚处填写轴移动的目标位置,可以是常数也可以是变量,本次测试填写变量;Velocity引脚处填写以绝对定位启动时轴的运行速度,可以是常数也可以是变量,本次测试填写变量;其余引脚根据实际情况填写,也可以不填写,本次测试选择不填写;程序如图20所示。
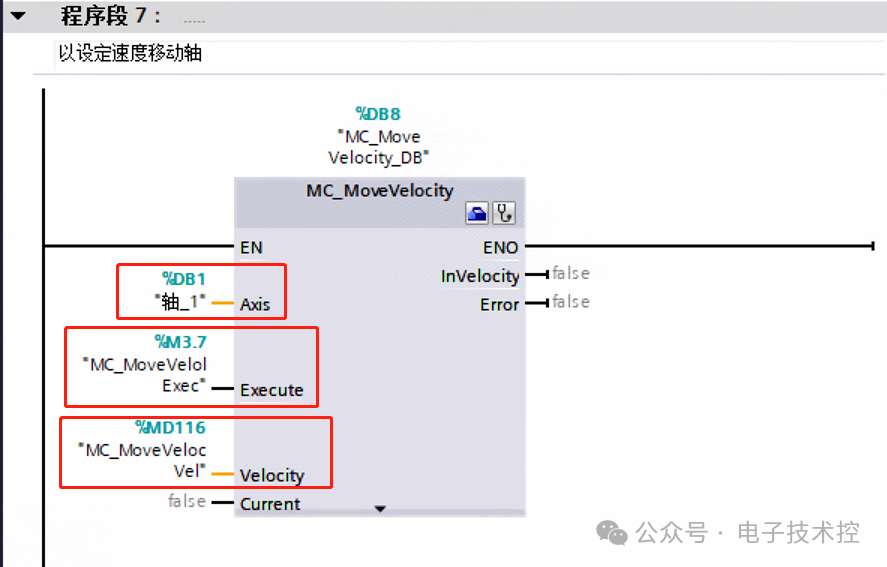
8.MC_MoveVelocity指令编程(以设定速度移动轴)
将MC_MoveVelocity指令拖入程序段中,对MC_MoveVelocity指令进行组态,此指令的作用主要是根据设定的速度连续移动轴;Axis引脚处填写轴工艺对象,直接将左侧工艺对象“轴_1”拖拽到此处即可;Execcute引脚处填写启动绝对控制控制点,此处填写M3.7;Velocity引脚处填写轴的运行速度,可以是常数也可以是变量,本次测试填写变量;其余引脚根据实际情况填写,也可以不填写,本次测试选择不填写;程序如图21所示。
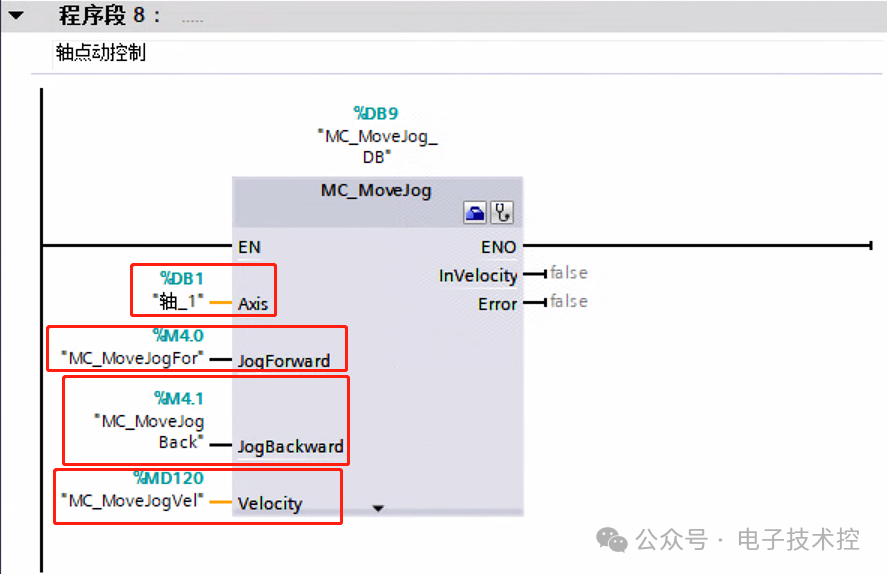
9.MC_MoveJop指令编程(以点动方式控制轴)
将MC_MoveJop指令拖入程序段中,对MC_MoveJop指令进行组态,此指令的作用主要是根据设定的速度点动控制轴;Axis引脚处填写轴工艺对象,直接将左侧工艺对象“轴_1”拖拽到此处即可;JopForward引脚处填写正方向点动控制点,此处填写M4.0;JopBackward引脚处填写反方向点动控制点,此处填写M4.1;Velocity引脚处填写轴的运行速度,可以是常数也可以是变量,本次测试填写变量;其余引脚根据实际情况填写,也可以不填写,本次测试选择不填写;程序如图22所示。
本文章所有的设置和组态仅针对本次测试,现场情况需要根据实际来!
干货★★★★★资料