KUKAC4通过HMI更改软件限位开关数值的方法
软件极限开关
通过可设定的软件限位开关范围,可限制所有机械手和定位轴的轴运动范围。该软件限位开关范围仅用作机器防护装置,并设定为可防止机械手 / 定位设备行驶到机械末端挡板(即硬限位)。软件限位开关在工业机器人”投入运行”时被设定。
现在KUKAC4通过HMI有两种更改软件限位开关数值的方法:
1.手动输入所需的数值,通过自己的测量和评估。
2.软限位的值自动与一个或多个程序适配。
通过机器人程序需求,在此过程中,机器人控制系统确定在程序中出现的最小和最大轴位置,作为参考。得出的这些数值可以作为软件限位开关来使用。
手动更改软件限位开关:
1. 在HMI主菜单中选择”投入运行” --> “售后服务” --> “软件限位开关”。窗口软件限位开关自动打开。
2. 在负和正两列中按需要更改限位开关的范围。
3. 用保存键保存更改后的数值。
将软件限位开关与程序相适配:
1.在主菜单中选择”投入运行” --> “售后服务”--> “软件限位开关”。窗口软件限位开关自动打开。
2. 按下”自动计算”。显示以下提示信息:”自动获取进行中”(但其数值极其不准确,需要进行调整) 。
3. 启动限位开关应与之相适配的机器人程序。让程序完整运行一遍,然后取消选择。
此时机器人在窗口软件限位开关中即显示每个轴所达到的最大和最小位置。
4. 为该软件限位开关应与之相适配的所有程序重复步骤 3。
在窗口软件限位开关中即显示每个轴所达到的最大和最小位置,而且以执行的所有程序为基准。
5. 如果所有需要的程序都执行过了,则在窗口软件限位开关中按下结束。

6. 按下”保存”,以便将确定的数值用作软件限位开关数值范围。
7. 如有需要时还可以手动更改自动确定的数值。
8. 用”保存键”保存更改。
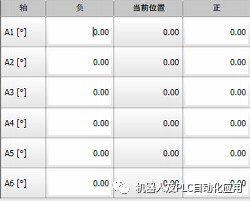
窗口软件限位开关:
1 .当前的负方向软限位开关.
2 .轴的当前位置值.
3 .当前的正方向软限位开关.
4. 自启动计算以来,相应轴所具有的最小位置值.
5. 自启动计算以来,相应轴所具有的最大位置值.
| “自动计算” | 启动自动确定: 机器人控制系统将轴目前具有的最小及最大位置写入窗口软件限位开关中的最小和最大两列里。 |
| “结束” | 结束自动确定。确定的最小/最大位置被传送到负和正两列中,但是它们还没有被保存。 |
| “保存” | 将这些数值作为软件限位开关保存在负和正两列里。 |
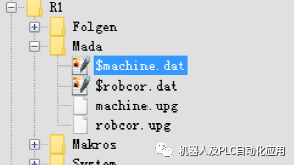
存储软限位参数的文件:“$MACHINE”。
例如:
正向最大值:
REAL $SOFTP_END[12] ;软件-ENDSCHALTER 正的极限[I] (I=1:A1,I=7:E1) [MM,GRAD]
$SOFTP_END[1]=185.0
$SOFTP_END[2]=20.0
$SOFTP_END[3]=144.0
$SOFTP_END[4]=350.0
$SOFTP_END[5]=120.0
$SOFTP_END[6]=350.0
$SOFTP_END[7]=230.0
负向最大值:
REAL $SOFTN_END[12] ;软件-ENDSCHALTER 负的极限[I] (I=1:A1,I=7:E1) [MM,GRAD]
$SOFTN_END[1]=-185.0
$SOFTN_END[2]=-130.0
$SOFTN_END[3]=-100.0
$SOFTN_END[4]=-350.0
$SOFTN_END[5]=-120.0
$SOFTN_END[6]=-350.0
$SOFTN_END[7]=-10000.0
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。