L3自动驾驶的“双保险”冗余EPS关键技术解析之冗余策略与安全机制
在自动驾驶系统中,转向系统是保证车辆正常行驶的关键部件之一。电动助力转向系统(EPS)作为现代汽车中广泛应用的转向系统,以其结构简单、响应迅速、能耗低等优点,成为自动驾驶系统的理想选择。然而,在复杂的道路环境和多变的驾驶场景下,单一的EPS系统难以满足L3级别自动驾驶对安全性和可靠性的要求。因此,冗余EPS技术的引入,为自动驾驶系统提供了更高的安全保障。
在冗余EPS技术中,冗余策略是关键之一。冗余策略主要分为以下几种:
1. 硬件冗余:通过设计两个或多个完全相同的EPS硬件系统,实现硬件层面的冗余。当一个系统出现故障时,另一个系统可以立即接管,确保车辆的正常行驶。
2. 软件冗余:在软件层面实现冗余,主要包括控制算法、数据处理等方面的冗余。通过设计多套独立的控制算法和数据处理流程,确保在单一算法或数据处理流程出现问题时,其他算法或流程能够正常工作。
3. 数据冗余:通过采集多个传感器数据并进行融合处理,实现数据层面的冗余。这种设计可以提高数据的准确性和可靠性,降低单一传感器数据错误对系统的影响。
4. 通讯冗余:在EPS系统与其他系统之间的通讯中,采用多路通讯通道和协议,确保在单一通讯通道或协议出现故障时,其他通道或协议能够正常通讯。
安全机制解析
除了冗余策略外,安全机制也是冗余EPS技术的重要组成部分。以下是几种常见的安全机制:
1. 故障诊断与预警机制:通过实时监测EPS系统的工作状态,及时发现潜在故障并进行预警。当发现故障时,系统可以自动切换到备份系统或通知驾驶员进行接管。
2. 安全降级机制:在自动驾驶系统出现故障时,系统能够自动降级到安全状态,确保车辆能够安全停车或继续行驶。这种机制可以避免因系统故障导致的潜在危险。
3. 紧急制动机制:在紧急情况下,系统可以自动启动紧急制动功能,确保车辆能够迅速停车。这种机制可以避免或减少因制动系统失效导致的危险。
4. 人机交互机制:在自动驾驶过程中,系统需要实时与驾驶员进行交互,确保驾驶员能够随时接管驾驶任务。这种机制可以提高驾驶员对自动驾驶系统的信任度,降低人机切换过程中的风险。
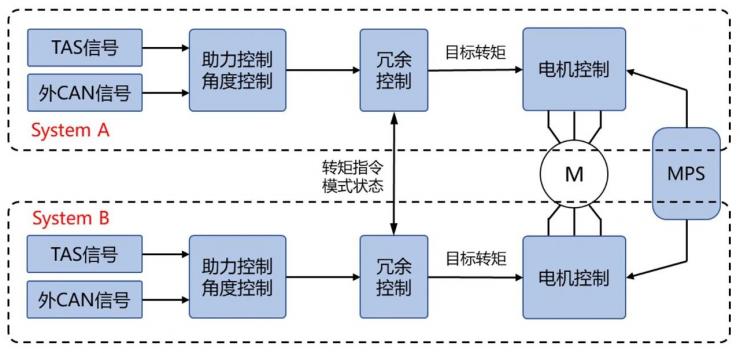
冗余EPS的双MCU架构。双MCU(ECU A和ECU B)都实现完整控制功能,上电初始化后默认分配主从角色。正常工作状态下,双系统均进行力矩指令计算,但是从系统响应主系统分配的扭矩指令。如果系统发生单点失效,双MCU根据故障诊断与处理机制判断是否进行主从切换,必要时从系统切换为主系统。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。