基于3D形状重建网络的机器人抓取规划方法
我们提出了一种新的机器人抓取规划方法,该方法同时使用了学习的抓取提议网络和学习的3D形状重建网络。我们的系统从目标对象的单个RGB-D图像生成6-DOF抓取,该图像作为两个网络的输入。通过几何重构来优化抓取提议网络生成的候选抓取,我们的系统能够准确地抓取已知和未知物体,即使在物体上的抓取位置在输入图像中不可见 本文介绍了该系统的网络结构、训练过程和优化方法。实验证明了我们的系统在抓取已知和未知物体时的有效性(在物理机器人环境中成功率为91%,在模拟环境中成功率为84%)。我们还进行了消融研究,展示了将学习抓取提议与几何重建相结合的好处,也表明我们的系统在抓取任务中优于多个参考基线。
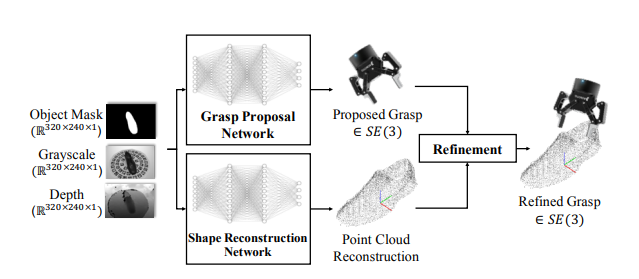
图1:系统概述。一个带有分割掩码的输入RGB-D图像被提供给两个神经网络,分别产生一个6自由度的抓取姿势和一个物体的3D点云重建。通过将抓取姿势投影到点云中最近的点来优化抓取姿势,从而产生最终的输出抓取。
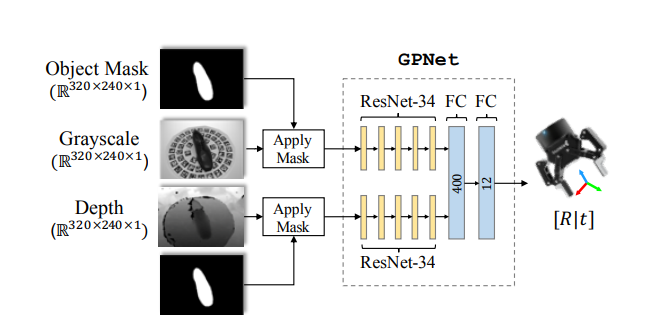
图2:GPNet的架构由并行的ResNet-34模块组成,这些模块嵌入了屏蔽的灰度图像和深度图像。这些嵌入被连接起来,并通过两个完全连接的层回归到一个向量t∈R12,表示齐次变换C TG。
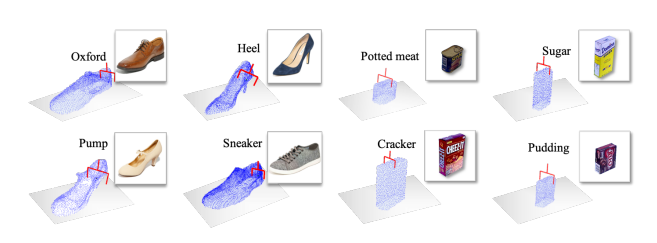
图3:在我们单独的shoe和YCB对象数据集中的示例抓取。从使用3D网格生成的一组候选抓取中,我们为每个对象选择一个单一的基本事实示例。
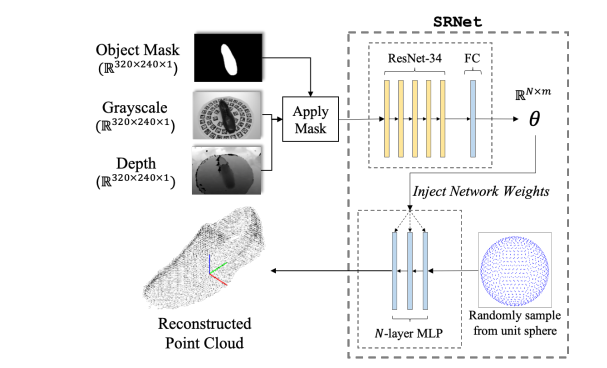
图4:从前景掩盖灰度和深度图像中,我们的3D形状重建网络SRNet学习了一个映射函数fθ,该函数将点从标准域(如单位球体)映射到3D对象。我们的系统利用这种重建所提供的附加几何信息来改进GPNet提出的抓取。
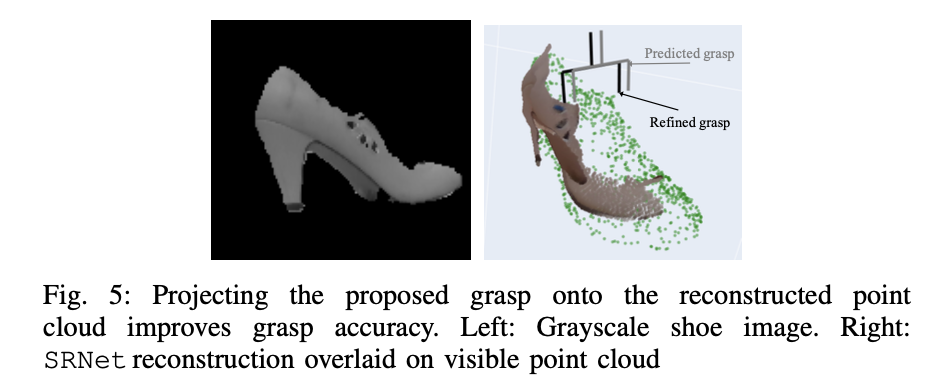
图5:将建议的抓取投影到重建点云上提高抓取准确性。左:灰度鞋图像。右:覆盖在可见点云上的SRNet重建。
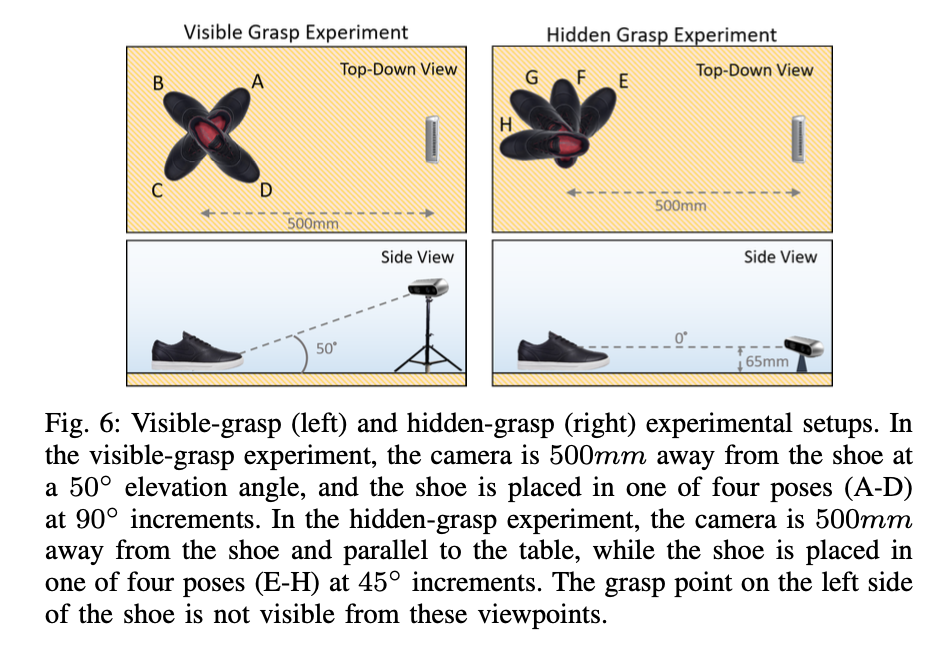
图6:可见抓取(左)和隐藏抓取(右)实验设置。在可见抓取实验中,相机以50度仰角,距离鞋子500mm处,鞋子以90度增量依次放置在4个位姿(A-D)处。在隐藏式抓取实验中,相机距离鞋子500mm并与桌子平行,鞋子分别以45度增量放置在四个位姿处(E-H)。从这些角度看不到鞋子左侧的抓握点。
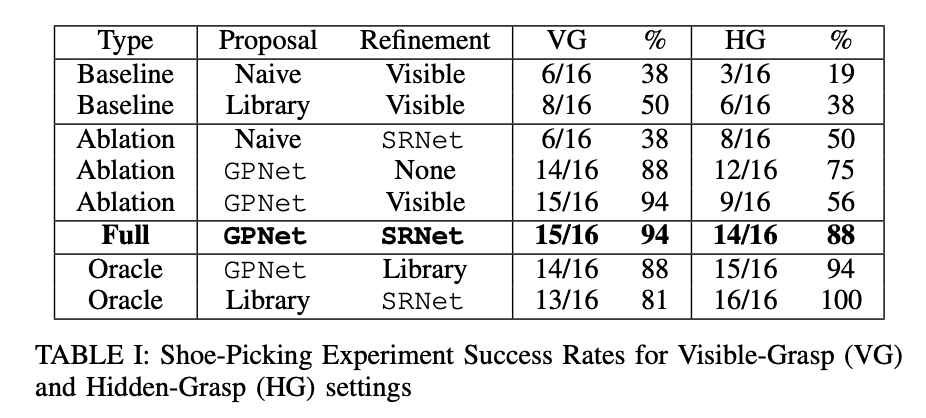
表I:可见抓握(VG)和隐藏抓握(HG)设置的鞋子抓取实验成功率
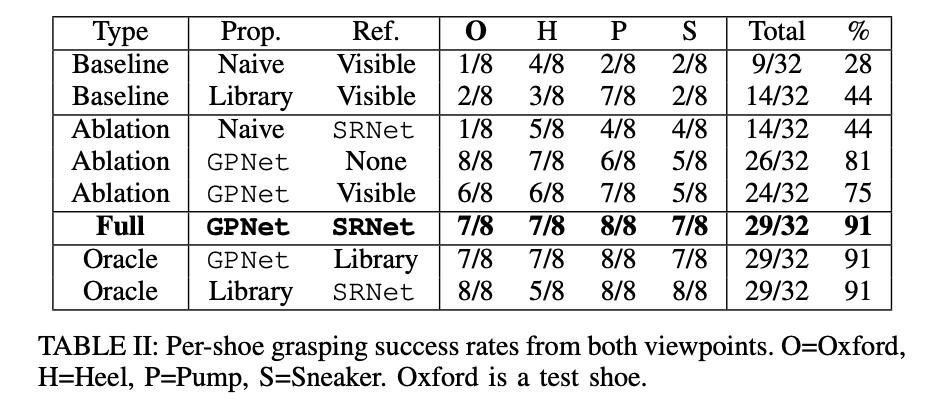
表II:从两个角度统计的每只鞋子抓取成功率。
图7:与物理设置蕾丝的模拟实验评估环境-Kinova Gen3臂和Robotiq 2F-85 平行颚夹钳
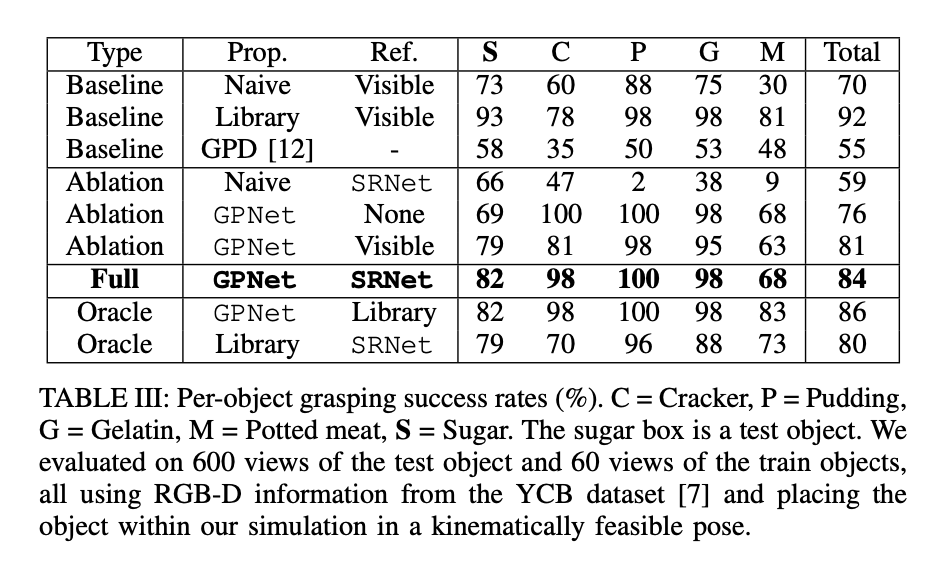
表III:每个物体的抓取成功率(%)。糖盒是一个测试对象。对测试对象的600个视图和火车对象的60个视图进行了评估,所有这些都使用YCB数据集中的RGB-D信息,并将对象放置在运动学可观的位姿模拟中。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。