BLDC电机的控制电路
如果需要电机转动起来,需要给电机转子一个旋转的磁场。对于三相无刷直流电机来说,直流电压源只为三相逆变器提供恒定电压,所以需要通过三相逆变器将直流电转换成三相电流,依次为不同线圈对通电。
BLDC电机通过下图所示三相逆变器电路可以实现电机的换向逻辑,实质上就是通过控制Q0~Q5开关的导通和切断,来控制右侧A、B、C三相电机定子上产生所需要的正弦电压,那么我们需要控制的也就是这六个开关的开关周期。这里涉及到了一个算法,后面我们会讲到,就是空调矢量脉宽调制(SVPWM)。
下图的BLDC电机在非驱动端的定子中嵌入了三个霍尔传感器。上文我们讲到了,当电机每转过60个电角度,其中一个霍尔传感器就会改变状态。所以完成一个点周期需要六步。
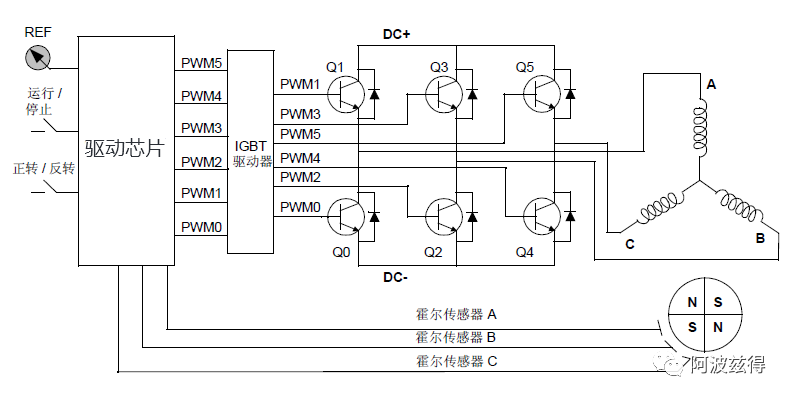
带霍尔传感器的BLDC电机控制电路
那么对于无霍尔传感器的BLDC电机电路,我们如何判断电机转子的位置呢?

无霍尔传感器的BLDC电机控制电路
这里我们需要引入反电动势的概念。当电机转动时,每个线圈绕组都会产生反电动势,根据楞次定律(来拒去留,增缩减扩),该电动势的方向与线圈绕组的电压相反,这个反电动势的极性与励磁电压相反。
霍尔传感器信号、反电动势、输出转矩和电流对照图:
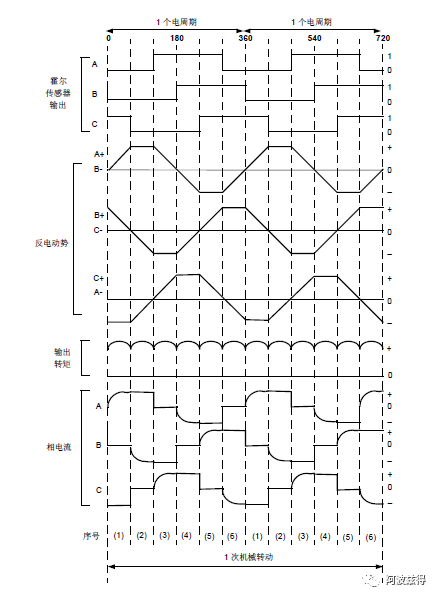
我们可以看到每当电机发生换向时,即霍尔传感器信号发生跳变,都有一个绕组为正电,一个绕组为负电,一个绕组保持开路。这时候反电动势的电压极性从正变为负或从负变为正,即反电动势经过零值。这就是我们通过识别反电动势过零点,来识别转速位置换向的过程。
5
BLDC电机控制算法的选择
简单来说,BLDC电机有两种控制方法:六步换向方波控制,磁场定向控制法(FOC)。
BLDC电机和永磁同步电机(PMSM)的结构大同小异,一般来说PMSM电机的控制通常只用磁场定向控制法。
六步换向方波控制方法比磁场定向控制法更简单,每次只有两相通电,不需要进行Park和Clark变换。但是六步换向方波控制存在比较大的转矩脉动,并且会有比较大的噪音。这里我们只讲磁场定向控制法。
一对磁极和两对磁极的 BLDC 电机运行动画
磁场定向控制 (FOC) 是一种高性能交流电机控制策略,可以实现电压矢量控制,从而实现了电机定子磁场的矢量控制,能够保证定子磁场与转子磁场时刻保持在90°,实现一定电流下最大的转矩输出。FOC的低速模式控制性能较好(性能好坏取决于速度反馈方式),正反向切换性能优异,并且FOC可以进行电流(力矩)、速度、角度三个闭环控制。采用正弦波控制,噪音会比方波控制小很多。