基于STM32的智能粮仓系统设计
一、项目背景
随着粮食质量要求的提高和储存方式的改变,对于粮仓环境的监测和控制也愈发重要。在过去的传统管理中,通风、防潮等操作需要定期人工进行,精度和效率都较低。而利用嵌入式技术和智能控制算法进行监测和控制,不仅能够实时掌握环境变化,还可以快速做出响应。
本项目选择STM32F103RCT6作为主控芯片,采用DHT11温湿度传感器和MQ9可燃气体检测模块进行数据采集,在本地利用显示屏实时显示出来。WiFi模块则用于与手机端实现数据通信和远程控制,方便用户随时了解粮仓环境状况并进行相应的操作。同时,通过连接继电器控制通风风扇和蜂鸣器报警,实现了智能化的温湿度检测和可燃气体浓度检测。

二、硬件选型
【1】主控芯片:STM32F103RCT6,这款芯片具有较高性能、低功耗等特点。
【2】温湿度传感器:DHT11,DHT11是一种数字温湿度传感器,价格便宜。
【3】可燃气体检测模块:MQ9模块,MQ9模块对多种可燃气体具有敏感性,可以精确检测可燃气体浓度。
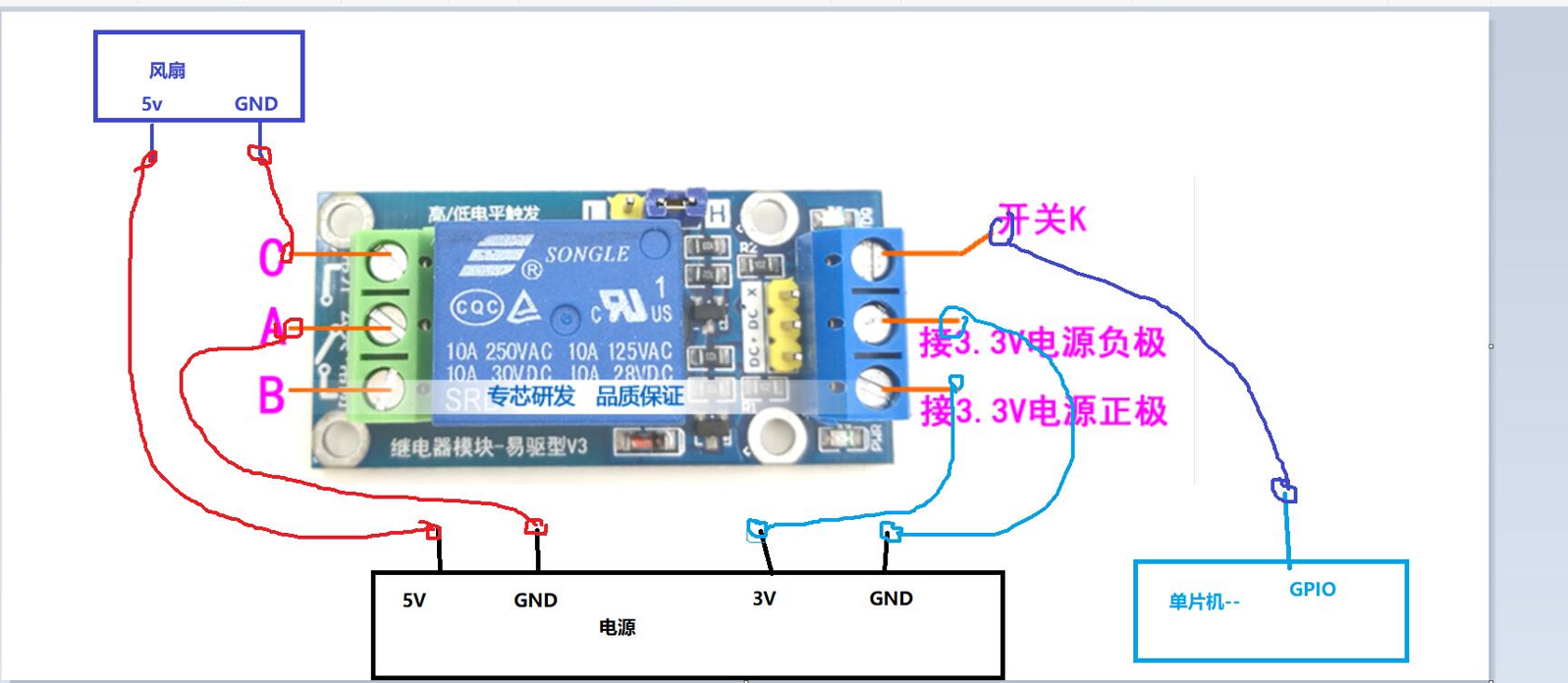
【4】通风风扇:选择直流电机作为通风风扇,使用继电器进行控制。
【5】WiFi模块:ESP8266,ESP8266是一种低成本的高性能WiFi模块,支持TCP/UDP协议。
【6】显示屏:采用7针引脚的OLED显示屏,SPI接口,分辨率128x64,用于显示当前温度、湿度、可燃气体浓度。
三、设计思路
【1】硬件层
通过STM32F103RCT6控制DHT11和MQ9等模块进行数据采集。在采集到温湿度和可燃气体浓度数据之后,对其进行处理,并判断是否超过了设定的阈值范围。如果超过了阈值,就控制继电器打开风扇,并通过蜂鸣器声音报警。
ESP8266 WiFi模块用于与手机端进行通信。ESP8266被配置成AP+TCP服务器模式,通过向服务器发送指令,实现远程控制风扇及设置相应阈值等操作,并能实时接收粮仓环境状况信息。
【2】软件层
STM32的控制程序使用C语言编写,采用keil软件进行整体项目开发,对外设进行控制并实现数据采集和智能控制。主要分为采集数据、处理数据、数据显示、控制继电器和蜂鸣器等功能模块。
手机APP采用Qt框架开发,实现对应数据界面显示和逻辑操作,能够实时显示和控制粮仓内部的温湿度和可燃气体浓度,并能够对风扇进行控制。同时,APP界面提供了设置选项,允许用户设置报警阈值参数。
四、代码设计
【1】DHT11采集温湿度
DHT11是一种数字温湿度传感器,能够通过单总线接口输出当前环境下的温度和相对湿度。它由测量模块及处理电路组成,具有体积小、成本低、响应时间快等特点,被广泛应用于各种环境监测和自动控制系统中。
下面代码是通过STM32F103RCT6采集DHT11温湿度数据通过串口打印输出(使用HAL库):
#include "main.h"
#include "dht11.h"
UART_HandleTypeDef huart1;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
char temp[20];
char humi[20];
while (1)
{
DHT11_Read_Data(temp, humi); // 读取DHT11数据
printf("Temperature: %s C, Humidity: %s %%
", temp, humi); // 打印温湿度数据
HAL_Delay(2000); // 延时2秒
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_OFF;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
static void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
}
void Error_Handler(void)
{
__disable_irq();
while (1)
{
}
}
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);
/*Configure GPIO pin : PC13 */
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
}
void HAL_UART_MspInit(UART_HandleTypeDef *uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct;
if (uartHandle- >Instance == USART1)
{
/* Peripheral clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------ > USART1_TX
PA10 ------ > USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9 | GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef *uartHandle)
{
if (uartHandle- >Instance == USART1)
{
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------ > USART1_TX
PA10 ------ > USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9 | GPIO_PIN_10);
}
}
s上面代码里,使用了DHT11读取函数DHT11_Read_Data(),该函数返回温度值和湿度值,并将其转换为字符串形式。通过串口与电脑连接后,可以使用串口调试软件来查看STM32采集到的温湿度数据。
【2】采集MQ9有毒气气体
MQ9是一种可燃气体传感器,可以检测空气中的多种可燃气体,例如甲烷、丙烷、丁烷等。它的工作原理是通过加热敏感元件,使其产生一个电阻变化,从而实现检测目标气体的浓度。MQ9具有高灵敏度、快速响应和稳定性好等特点,广泛应用于火灾报警、室内空气质量监测、工业生产等领域。需要注意的是,MQ9只能检测可燃气体,不能检测其他气体,如二氧化碳、氧气等。
下面代码是通过STM32F103RCT6采集MQ9可燃气体转为浓度通过串口打印(使用HAL库):
#include "main.h"
UART_HandleTypeDef huart1;
ADC_HandleTypeDef hadc1;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_ADC1_Init(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_ADC1_Init();
uint16_t adc_value;
float voltage;
float concentration;
char buffer[20];
while (1)
{
HAL_ADC_Start(&hadc1); // 启动ADC转换
if (HAL_ADC_PollForConversion(&hadc1, 100) == HAL_OK) // 等待转换完成
{
adc_value = HAL_ADC_GetValue(&hadc1); // 获取原始ADC值
voltage = (float)adc_value * 3.3f / 4096.0f; // 转换为电压值
concentration = (float)(2.5f - voltage) / 0.2f; // 根据MQ9传感器曲线计算浓度值
sprintf(buffer, "Concentration: %.2f %%
", concentration); // 将浓度值转换为字符串
printf("%s", buffer); // 通过串口打印浓度值
}
HAL_ADC_Stop(&hadc1); // 停止ADC转换
HAL_Delay(2000); // 延时2秒
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_OFF;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
static void MX_ADC1_Init(void)
{
ADC_ChannelConfTypeDef sConfig;
hadc1.Instance = ADC1;
hadc1.Init.ScanConvMode = DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
sConfig.Channel = ADC_CHANNEL_5;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_55CYCLES5;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
}
static void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。