16.1 介绍
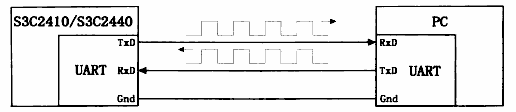
UART(Universal Asynchronous Receiver Transmitter),通用异步收发器,用来传输穿行数据时
UART 之间以全双工方式传输数据,连线方法只有 3 根电线:TXD 用于发送数据,RXD 用于接收数据,GND用于给双方提供参考地。
串口数据线以 “位”为最小单位传输数据。帧(frame)由具有完整意义的、不可分割的若干位组成,它包含开始位、数据位、校验位和停止位。
UART 使用标准的 TTL/CMOS 逻辑电平(0~5V、0~3.3V、0~2.5V 或 0~1.8V)来表示数据,高电平表示1,低电平表示0。为了增强数据的抗干扰能力、提高传输长度,通常将 TLL/CMOS 逻辑电平转换位 RS-232 逻辑电平,3~12V 表示0,-3~-12V 表示1。
数据的传输流程如下:
平时数据处于 空闲 状态
当要发送数据时,UART 改变 TXD 数据线的状态(变为 0 状态)并维持 1 位的时间,这样接收方检测到开始位后,再等待 1.5 位的时间就开始一位一位地检测数据线的状态得到所传输的数据
UART 一帧中可以由5、6、7或8位的数据,发送方一位一位的改变数据线的状态将它们发送出去,首先发送最低位
如果使用校验功能,UART 在发送完数据位后,还要发送一个校验位。有两种校验方法:奇校验、偶校验——数据位连同校验位中,“1”的数目等于奇数或偶数
最后,发送停止位,数据线恢复到“空闲”状态(1状态)。停止位的长度有3种:1位、1.5位、2位
16.2 S3C2440 UART 特性
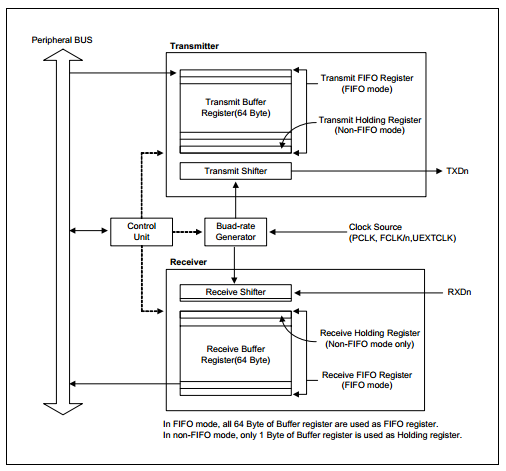
S3C2440 UART 中有3个独立的通道,每个通道都可以工作于中断模式或DMA模式,即UART可以发出中断或DMA请求以便在UART、CPU 间传输数据。UART 由波特率发生器、发送器、接收器和控制逻辑组成
使用系统时钟时,UART的波特率可以达到 115.2Kbit/s,若使用 UEXTCLK 引脚提供的外部时钟,则可以达到更高的波特率。波特率可以通过编程进行控制。
S3C2440 UART 的 FIFO 深度位64.。发送数据时,CPU 先将数据写入发送 FIFO 中,然后 UART 会自动将 FIFO 中的数据复制到“发送移位器”(Transmit Shifter)中,发送移位器将数据一位一位的发送到 TXDn 数据线上(根据设定的格式,插入开始位、校验位和停止位)。接收数据时,“接收移位器”(Receive Shifter)将RXDn 数据线上的数据一位一位接收进来,然后复制到接收 FIFO 中,CPU 即可以从中读取数据。
S3C2440 UART 的每个通道支持的停止位有 1 位、2位,数据位有5、6、7、8位,支持校验功能,另外还有红外发送/接收功能。
UART 结构图如下:
其他说明见芯片手册第11章节
16.3 程序
uart.lds
1 SECTIONS {
2 . = 0x30000000;
3 .text : { *(.text) }
4 .rodata ALIGN(4) : {*(.rodata)}
5 .data ALIGN(4) : { *(.data) }
6 .bss ALIGN(4) : { *(.bss) *(COMMON) }
7 }
s3c24xx.h
1 /* WOTCH DOG register */
2 #define WTCON (*(volatile unsigned long *)0x53000000)
3
4 /* SDRAM regisers */
5 #define MEM_CTL_BASE 0x48000000
6 #define SDRAM_BASE 0x30000000
7
8 /* NAND Flash registers */
9 #define NFCONF (*(volatile unsigned int *)0x4e000000)
10 #define NFCMD (*(volatile unsigned char *)0x4e000004)
11 #define NFADDR (*(volatile unsigned char *)0x4e000008)
12 #define NFDATA (*(volatile unsigned char *)0x4e00000c)
13 #define NFSTAT (*(volatile unsigned char *)0x4e000010)
14
15 /*GPIO registers*/
16 #define GPBCON (*(volatile unsigned long *)0x56000010)
17 #define GPBDAT (*(volatile unsigned long *)0x56000014)
18
19 #define GPFCON (*(volatile unsigned long *)0x56000050)
20 #define GPFDAT (*(volatile unsigned long *)0x56000054)
21 #define GPFUP (*(volatile unsigned long *)0x56000058)
22
23 #define GPGCON (*(volatile unsigned long *)0x56000060)
24 #define GPGDAT (*(volatile unsigned long *)0x56000064)
25 #define GPGUP (*(volatile unsigned long *)0x56000068)
26
27 #define GPHCON (*(volatile unsigned long *)0x56000070)
28 #define GPHDAT (*(volatile unsigned long *)0x56000074)
29 #define GPHUP (*(volatile unsigned long *)0x56000078)
30
31
32
33 /*UART registers*/
34 #define ULCON0 (*(volatile unsigned long *)0x50000000)
35 #define UCON0 (*(volatile unsigned long *)0x50000004)
36 #define UFCON0 (*(volatile unsigned long *)0x50000008)
37 #define UMCON0 (*(volatile unsigned long *)0x5000000c)
38 #define UTRSTAT0 (*(volatile unsigned long *)0x50000010)
39 #define UTXH0 (*(volatile unsigned char *)0x50000020)
40 #define URXH0 (*(volatile unsigned char *)0x50000024)
41 #define UBRDIV0 (*(volatile unsigned long *)0x50000028)
42
43
44 /*interrupt registes*/
45 #define SRCPND (*(volatile unsigned long *)0x4A000000)
46 #define INTMOD (*(volatile unsigned long *)0x4A000004)
47 #define INTMSK (*(volatile unsigned long *)0x4A000008)
48 #define PRIORITY (*(volatile unsigned long *)0x4A00000c)
49 #define INTPND (*(volatile unsigned long *)0x4A000010)
50 #define INTOFFSET (*(volatile unsigned long *)0x4A000014)
51 #define SUBSRCPND (*(volatile unsigned long *)0x4A000018)
52 #define INTSUBMSK (*(volatile unsigned long *)0x4A00001c)
53
54 /*external interrupt registers*/
55 #define EINTMASK (*(volatile unsigned long *)0x560000a4)
56 #define EINTPEND (*(volatile unsigned long *)0x560000a8)
57
58 /*clock registers*/
59 #define LOCKTIME (*(volatile unsigned long *)0x4c000000)
60 #define MPLLCON (*(volatile unsigned long *)0x4c000004)
61 #define UPLLCON (*(volatile unsigned long *)0x4c000008)
62 #define CLKCON (*(volatile unsigned long *)0x4c00000c)
63 #define CLKSLOW (*(volatile unsigned long *)0x4c000010)
64 #define CLKDIVN (*(volatile unsigned long *)0x4c000014)
65
66
67 /*PWM & Timer registers*/
68 #define TCFG0 (*(volatile unsigned long *)0x51000000)
69 #define TCFG1 (*(volatile unsigned long *)0x51000004)
70 #define TCON (*(volatile unsigned long *)0x51000008)
71 #define TCNTB0 (*(volatile unsigned long *)0x5100000c)
72 #define TCMPB0 (*(volatile unsigned long *)0x51000010)
73 #define TCNTO0 (*(volatile unsigned long *)0x51000014)
74
75 #define GSTATUS1 (*(volatile unsigned long *)0x560000B0)
serial.h
1 void uart0_init(void);
2 void putc(unsigned char c);
3 unsigned char getc(void);
4 int isDigit(unsigned char c);
5 int isLetter(unsigned char c);
head.S
1 @******************************************************************************
2 @ File:head.S
3 @ 功能:设置SDRAM,将程序复制到SDRAM,然后跳到SDRAM继续执行
4 @******************************************************************************
5
6 .extern main
7 .text
8 .global _start
9 _start:
10 Reset:
11 ldr sp, =4096 @ 设置栈指针,以下都是C函数,调用前需要设好栈
12 bl disable_watch_dog @ 关闭WATCHDOG,否则CPU会不断重启
13 bl clock_init @ 设置MPLL,改变FCLK、HCLK、PCLK
14 bl memsetup @ 设置存储控制器以使用SDRAM
15 bl copy_steppingstone_to_sdram @ 复制代码到SDRAM中
16 ldr pc, =on_sdram @ 跳到SDRAM中继续执行
17 on_sdram:
18 ldr sp, =0x34000000 @ 设置栈指针
19 ldr lr, =halt_loop @ 设置返回地址
20 ldr pc, =main @ 调用main函数
21 halt_loop:
22 b halt_loop
init.c
1 /*
2 * init.c: 进行一些初始化
3 */
4
5 #include "s3c24xx.h"
6
7 void disable_watch_dog(void);
8 void clock_init(void);
9 void memsetup(void);
10 void copy_steppingstone_to_sdram(void);
11
12 /*
13 * 关闭WATCHDOG,否则CPU会不断重启
14 */
15 void disable_watch_dog(void)
16 {
17 WTCON = 0; // 关闭WATCHDOG很简单,往这个寄存器写0即可
18 }
19
20 #define S3C2410_MPLL_200MHZ ((0x5c<<12)|(0x04<<4)|(0x00))
21 #define S3C2440_MPLL_200MHZ ((0x5c<<12)|(0x01<<4)|(0x02))
22 /*
23 * 对于MPLLCON寄存器,[19:12]为MDIV,[9:4]为PDIV,[1:0]为SDIV
24 * 有如下计算公式:
25 * S3C2410: MPLL(FCLK) = (m * Fin)/(p * 2^s)
26 * S3C2440: MPLL(FCLK) = (2 * m * Fin)/(p * 2^s)
27 * 其中: m = MDIV + 8, p = PDIV + 2, s = SDIV
28 * 对于本开发板,Fin = 12MHz
29 * 设置CLKDIVN,令分频比为:FCLK:HCLK:PCLK=1:2:4,
30 * FCLK=200MHz,HCLK=100MHz,PCLK=50MHz
31 */
32 void clock_init(void)
33 {
34 // LOCKTIME = 0x00ffffff; // 使用默认值即可
35 CLKDIVN = 0x03; // FCLK:HCLK:PCLK=1:2:4, HDIVN=1,PDIVN=1
36
37 /* 如果HDIVN非0,CPU的总线模式应该从“fast bus mode”变为“asynchronous bus mode” */
38 __asm__(
39 "mrc p15, 0, r1, c1, c0, 0n" /* 读出控制寄存器 */