美国水下自主监测系统高度重视自主无人潜航器(UUV)集群和人工智能技术的运用。
在美国水下自主监测系统中,自主作业的UUV构建了集群协同知识库,集群人工智能(AI)决策系统以此知识库为基础,对UUV的行动作出决策。
目前,集群AI决策系统需要对UUV上获得的数据进行分析处理,从而提高决策的精准性。努德雷特海底山脊三维地图的绘制利用了Falkor科研船和UUV AE2000f在680至780米的深度作业,该潜航器生成了130万张图像的数据库。在上述图像数据库的基础上,人工智能系统成功绘制了海底表面。研究人员人工处理大批量数据集需要几个月的时间,而使用实时人工智能则缩短了处理时间,几天就能得到带有识别区域的地图。人工智能系统的引入使UUV的数据处理能力得到明显提升。
美海军在开发超大型UUV的研制过程中,不断在海洋机器人系统中应用人工智能技术。美海军与波音防务公司签订了“虎鲸”超大型无人潜航器研制合同。“虎鲸”可连续在海上作业6个月,最大航程可达12000千米,可执行若干作战任务,包括反潜、水下和水面侦察。
美国国防部高级研究项目办公室(DARPA)已经授出了六份合同,合同内容关于Angler计划(“垂钓者”),该计划旨在创建新一代自主水下机器人系统,可以在没有通信或人为干预的情况下进行远距离航行,并且能够物理操纵海底目标。Angler是一个机器人系统,它使用人工智能技术进行自主导航和海底探索。此外,即使是在黑暗、动荡和半透明的海况下,该机器人也能够自主执行搜索和操纵任务。
海洋监测系统的智能群组控制、规划、自主组织和目标分配问题是目前急需解决的技术问题。海洋监测系统的智能化被简化为使用基于蜂群原理的生物启发系统。在该系统中,设备之间可以互操作,上述互动的案例是Aquabotix公司的SwarmDiver项目。SwarmDiver UUV集群可以下潜到600英尺深处,与其他潜航器同步工作,如图1所示。

图1 SwarmDiver UUV集群固定在水底
无人集群间交互式蜂群算法促进了集群协同决策技术的发展。据Aquabotix公司称,SwarmDiver UUV的智能控制和规划系统使UUV能够快速而准确地自组织成不同的蜂群结构,并执行同步协同行动,如进行大范围海区水文气象数据收集。 人工智能技术越来越多地被应用于复杂海洋监测系统自主规划、数据处理与分析等方面。集群智能任务规划技术可以控制无人自主潜航器(UUV)在海洋环境中的导航,在未知环境中形成行为逻辑和运动规划,以及优化处理UUV接收的增益数据。无人潜航器功能扩展和性能提升需要发展智能自主控制技术,并能够便捷地与外部世界和其他设备互联互通互操作,这些都是系统开发面临的挑战。海洋智能监测系统发展趋势如图2所示。
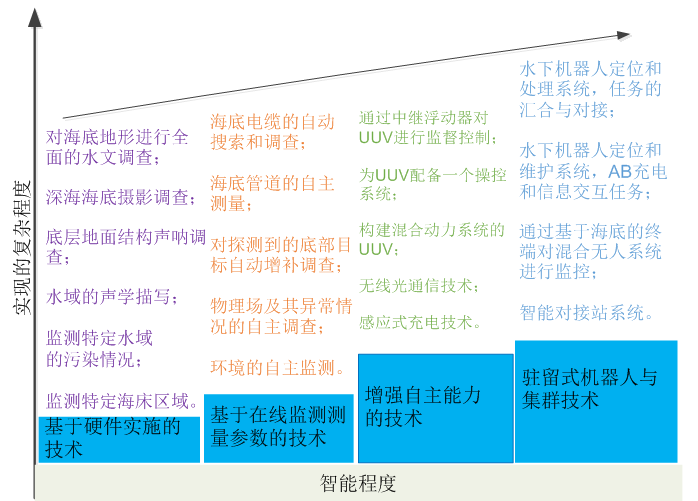
图2 海洋智能监测系统发展趋势
美国对UUV自主控制和集群协同等智能技术进行了集成,使得单平台UUV单体智能技术潜力逐年增长。现在美海军又以混合UUV集群协同为基础,形成异构UUV集群,逐步形成了无人集群群体智能能力,提高了海洋无人化监测系统的效率和自主性,可在极端、动态变化的非确定性环境下持续执行指定的任务。海上监测系统逐步发展成为高度智能的无人化集群系统,在保证高水平精准控制的同时,对不确定复杂环境适应性逐步增强,未来有望获得普遍运用。









