无刷直流电机的三相六臂全桥驱动电路讲解
无刷直流电机在运行时,永磁矩力推动电路中有± 自旋转距,经电路中断后转台旋回,再次上电时产生新的自旋转距,从而形成转子旋转,实现电机运动。该原理以及旋转机构的小体积,使其应用于工业领域极为广泛。其优势在于体积小,功率输出高,功耗低,抗干扰能力强,调速范围大,可靠性高。
在极限转速、经验调速中,输出力矩和功率可得到改进,能较快达到其最终转速,几乎没有延时,因此该电机拥有很好的运行特性。但是在定子I-t特性的变化性上,其精度大大降低,使得较难对其进行定量调速,而空载时,I-t特性也不完善,无法保证精度。
无刷直流电机其基本的原理如下图所示,无刷直流电机的转子是永磁体,通过改变定子上的线圈的电流方向所产生的磁场使转子旋转。通过控制通向线圈的电流方向和大小来控制转子的旋转。
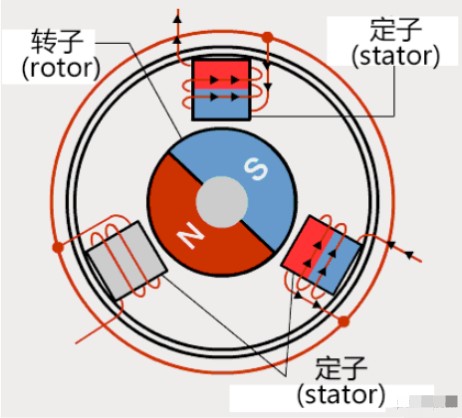
无刷直流电机由电机本体、逆变器、位置检测器、控制器四部分组成。
无刷直流电机的三相六臂全桥驱动电路
无刷直流电机驱动控制电路如图所示。该电路采用三相六臂全桥驱动方式,采用此方式可以减少电流波动和转矩脉动,使得电机输出较大的转矩。在电机驱动部分使用6个功率场效应管控制输出电压,四轴飞行器中的直流无刷电机驱动电路电源电压为12V.驱动电路中,Q1~Q3采用IR公司的IRFR5305(P沟道),Q4~Q6为IRFR1205(N沟道)。该场效应管内藏续流二极管,为场效应管关断时提供电流通路,以避免管子的反向击穿,其典型特性参数见表1.T1~T3采用PDTC143ET 为场效应管提供驱动信号。
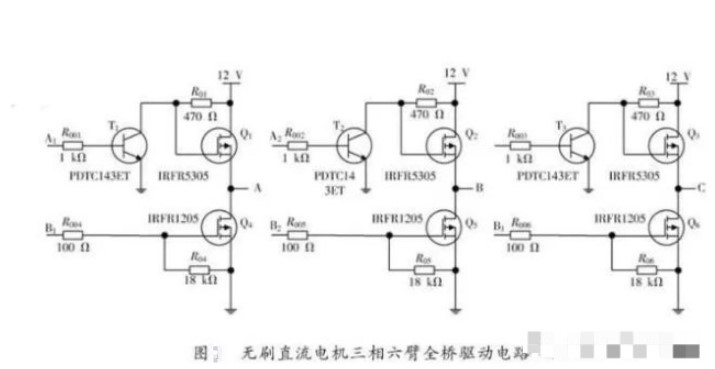
由图1 可知,A1~A3 提供三相全桥上桥臂栅极驱动信号,并与ATMEGA16单片机的硬件PWM驱动信号相接,通过改变PWM信号的占空比来实现电机转速控制;B1~B3提供下桥臂栅极驱动信号,由单片机的I/O口直接提供,具有导通与截止两种状态。
无刷直流电机驱动控制采用三相六状态控制策略,功率管具有六种触发状态,每次只有两个管子导通,每60°电角度换向一次,若某一时刻AB相导通时,C相截至,无电流输出。单片机根据检测到的电机转子位置,利用MOSFET的开关特性,实现电机的通电控制,例如,当Q1、Q5打开时,AB相导通,此时电流流向为电源正极→Q1→绕组A→绕组B→Q5→电源负极。类似的,当MOSFET打开顺序分别为Q1Q5,Q1Q6,Q2Q6,Q2Q4,Q3Q4,Q3Q5时,只要在合适的时机进行准确换向,就可实现无刷直流电机的连续运转。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。