AI智驾时代降临,端到端奏响“三重奏”
“追上未来,抓住它的本质,把未来转变为现在”,俄国哲学家车尔尼雪夫斯曾这样描述未来。而走到今天的新能源汽车,其通向未来的本质就是做好智能化。
呐喊智能化的口号,从2023年延续到2024年。如今,智能化的落点,从最开始的智能座舱、NOA智能驾驶等,开始转向新的轨迹。
近日,小鹏在广州举办“小鹏汽车AI智驾技术发布会”,向全球用户全量推送天玑系统XOS 5.2.0版本;其XNGP系统也将实现“不限城市、不限路线、不限路况的”全国全量开放。
此次发布会上着重突出的“端到端”“AI”等关键词,也暗示了业内新的共识——智能化的未来将向AI智驾看齐。
AI智驾时代已经到来
新能源车企智能化的步伐,从2023年迈出至今,或许已近半程。但时移世易,新的风向标也随之而来。
去年8月,广汽宣布正式推出广汽AI大模型平台,并将搭载于高端智能轿跑昊铂GT亮相;9月,华为云在华为全联接大会2023上发布盘古汽车大模型,并进一步探讨盘古汽车大模型在行业场景中的应用落地。

比亚迪璇玑AI大模型
今年1月,比亚迪推出了行业首创双循环多模态AI——璇玑AI大模型,首次将人工智能技术应用到车辆全领域。同年1月,蔚来推送了基于AI智能底盘技术打造的智能系统Banyan榕2.4.0。可见,AI大模型已经开始向新能源汽车渗透。
具体到应用场景上,大语言模型通过赋能语音助手,提升对乘客语音语义的理解能力,从而加速人车交互进化;视觉大模型通过优化感知,然后生成接近于真实的画面,从而降低传感器硬件使用成本,加速自动驾驶普及。
值得肯定的是,大模型在新能源汽车上得以应用,进一步打开了汽车智能化的想象空间,同时也预示着汽车智能化已经实现技术底层的突破。
只是,结合国内复杂的路况,单靠大量“小模型”堆砌,以及海量人工手写规则代码的辅助,始终难以穷尽驾驶时的各种情境,这也是近来各品牌高阶智驾车辆事故频发的主要原因之一。
此时,车企开始转而启用性能更强的“大模型”取代“小模型”,原本庞大的模块化结构,也开始变得简洁起来。之所以这样转变,是因为“小模型”堆砌相当于多模块组合后,各司其职,最后汇总处理结果,由于是多个“大脑”同时决策,处理结果容易发生冲突。
而“大模型”执行的是端到端的处理逻辑,从感知层的数据输入,到规控层的策略输出,整套流程都由一个或两个大模型搞定,处理效果的冲突性明显渐弱。
加之,AI可以通过学习和模仿人类的思考决策逻辑,并用端到端数据驱动算法迭代升级,从而取代传统的人工手写算法规则迭代,使得处理效率更高,决策错误率更低。
随着AI大模型逐渐成为汽车智驾跃进的解决方案,新能源汽车的智能化之路正式步入AI智驾时代,端到端大模型也成为业内争相追捧的热门。
华为、小鹏、特斯拉的“路线之争”
AI智驾趋势下,端到端大模型应运而生。这一思路最早由特斯拉提出,华为和小鹏紧随其后,抛弃规则、拥抱数据的“端到端”热潮,逐渐成为业界共识。
对车企来说,“端到端”首先是个非常好的营销概念,因为有热度和讨论度,所以发布相关概念产品,于品牌而言百利而无一害。但因为其定义模糊,市场上的端到端概念产品各有“特色”,最先入局的华为、特斯拉、小鹏便已经出现端到端落地路线上的分歧。
最早发声的特斯拉认为“端到端”应该是“一个模型走天下”。2023年12月,特斯拉的智驾工程师Dhaval Shroff 向马斯克提出建议,抛掉手写规则,搭建一张神经网络,让它大量观看人类司机的驾驶视频,并自行输出正确的行驶轨迹。直到今年1月,采用端到端架构的FSD V12正式向北美用户推送。据介绍,这一版本使用的正是单个端到端的神经网络。
而华为的ADS 3.0智驾系统,是用两个“大模型”,分别实现感知和规控的“端到端”;小鹏的XNGP则被分为感知XNet、规划XPlaner、控制XBrain三个部分。这一做法等同于将感知、规划和控制三个模块全部揉进一个模型中。
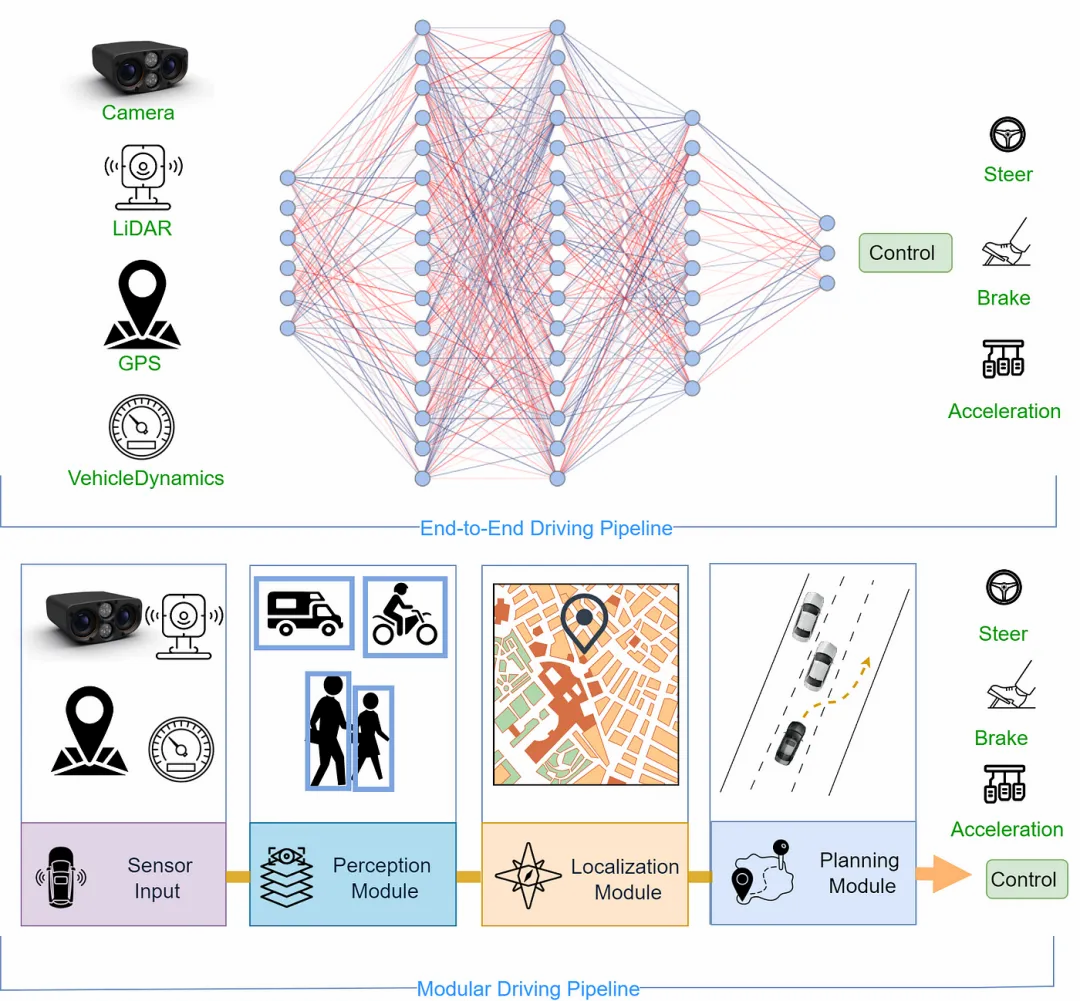
智驾的端到端与模块化方案
回顾过去数年,几乎所有的智驾企业都选择了与端到端“对立”的另一条路:模块化。在模块化的结构中,智驾系统被拆解为多个上下游连接的功能子模块,各模块彼此接力从而完成整个智驾任务。
由此来看,华为、小鹏的端到端大模型,更近似于模块化方案演变、融合后的结果,由多模块逐渐收缩为“感知-规划-控制”三模块,这一方案有进步但未完全突破。
尽管,模块数已经变少,但感知端为了保证规控端的平稳运行,仍有可能出现被迫丢失信息的情况,这是模块化结构一直存在的“硬伤”。
然而,只有保证系统在决策时获取足够全面的信息,其最终的决策效果才有可能达到全局最优。这是避不开的,同时也是与模块化结构最为矛盾的一环。
从技术角度来看,“端到端”极其依赖于大模型内部的神经网络结构,而神经网络本身又具备不可解释性,所以端到端的应用和界定一直是各执一词。但归根究底,成功落地、实现量产,提高驾驶安全性和便捷度才是智驾的核心。
过程或许不那么重要,结果才是。
新能源的“下半场”,端到端的“三重奏”
时至今日,端到端大模型的诞生,似乎为新能源车“下半场”的智能化竞争提供了一个确切方向,但是从进展来看,它还不足以将智能驾驶迅速推至终点。
因为,想要实现端到端大模型效果的最大化,车企和供应商们还有三大关卡需要面对。
1、数据需求激增
据悉,特斯拉从约32亿公里的行驶数据中挖掘了数万小时视频数据用于FSD训练。同时,也有自动驾驶工程师表示,训练端到端模型时,原始积累的路测数据仅有2%可用。可见,端到端模型对数据的需求量之大。
除了数据线需求庞大外,数据质量也是一大难关。小马智行的CTO楼天城曾表示,想要训练出高性能的端到端模型,数据质量的要求比一般性能模型高出几个数量级。
单论数据而言,目前国内车企的数据储备基本均落后于特斯拉,还处于初期阶段。加之对数据质量的要求,国内车企离数据积累的“长跑终点”仍“遥遥无期”。
2、算力需求激增
随着端到端自动驾驶的发展,训练海量数据所需的算力需求越来越高。对此,马斯克多次表示,目前FSD V12端到端模型的迭代,主要也是受到云端算力资源的掣肘,并计划重金堆算力。

图源来自汽车之心
眼见算力成了端到端的“必过关卡”,各大车企、供应商争相开始跑马圈地。有意思的是,这条路线上,行业也走向了分叉口。一方是倾向于重投算力的“大力出奇迹”,另一方是深耕算法的“工匠主义”。
从特斯拉、华为等头部车企都在重投超算中心的动作来看,算力提升,对应端到端智驾效果的天花板也会随之被抬高。或许,两条路径选择的背后,不仅有端到端战略规划的差异,也存在资本实力的差距。
可见,进入端到端阶段后,车企对训练算力的需求越高,也意味着需要更多的资金、人力和时间投入。这条路线走到最后,不仅是算力的比拼,也是综合实力的角逐。
3、商业化落地困难
端到端作为一个新的技术路线,堆算力、堆数据、加算法都是高门槛,抬高进场壁垒的同时,试错成本也在明显增加,入场企业需要仔细斟酌效率与成本之间的平衡问题。
即使完成了开发,而最后端到端方案的验证落地,也需要有合理且成熟的验证方式作为前提。直接实车验证显然成本过于高昂,而基于数据测试为主的开环测试,与端到端智驾所看重的可交互性并不匹配。
最后是落地市场的考验。目前,消费者之间普遍存在一种矛盾情绪。一方面对于汽车“智能化”和自动驾驶功能的兴趣与期望在上升,另一方面他们的支付意愿却在普遍下降。所以,即便完成了端到端智驾的量产,但却不被市场买单,一切愿景仍将化为乌有。
结语
进入AI智驾时代后,端到端模型的比拼愈演愈烈。基于算力、数据的需求,越早推出全国都可用的智驾方案,就能收集到更多数据,从而率先提升智驾能力,实现“强者愈强”。
这一路径,是包括特斯拉、华为、小鹏等头部车企正在做的事情,但是正在做不等于有结果。因此,最终局里上演的到底是弯道超车,还是黑马崛起,亦或是强者恒强,这都犹未可知。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。