LiDAR如何为自动驾驶汽车提供关键距离传感
如果您正在设计自动驾驶汽车应用,您就会知道 LiDAR(光检测和测距)的重要性。LiDAR 是执行自动驾驶汽车距离传感的关键光学技术,是高级驾驶辅助系统 (ADAS) 的重要组成部分,对自动驾驶汽车至关重要。其性能取决于光前端,以及信号如何通过信号链传输然后进行处理。该信号链中的一个重要元件是跨阻放大器(TIA)。在这篇博文中,我将概述LiDAR的工作原理,并讨论在有效的TIA中寻找什么。
在LiDAR应用中,激光纳秒脉冲脉冲从光源发送并从视图中的对象反射。检测反射光,飞行时间(ToF)创建视图中物体的距离图(图1)。
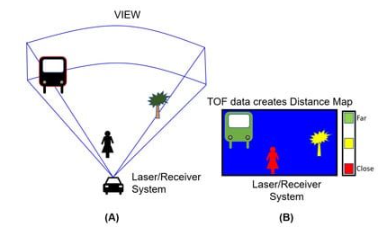
图1.汽车激光/接收器系统(A)的视图以饼形角度捕获物品。ToF数据测量(B)物体与激光/接收器系统的距离。
在图1中,来自汽车激光器(A)的纳秒脉冲信号脉冲将光发送到视图中的目标区域。一旦激光信号爆发击中物体,光线就会回到汽车上。车辆中的电子设备通过ToF数据标记捕获返回的信号。ToF的度量是返回激光/接收器系统位置的往返时间。为了收集完整的ToF数据,激光/接收器系统跨越整个视图。
ToF数据创建一个距离图(B),提供物体与激光/接收器系统的距离。在图 1.B 中,距离较小的数据值表示距离较近的项目,距离较大的数据值表示项目较远。根据激光/接收器ToF数据(B),红色数字(女性)是最接近的,其次是黄色物体(一棵树),最后是远处的绿色物体(城市公共汽车)。视图中的区域不断来回扫描,以获得全面和持续的覆盖。
激光/接收器系统电子元件概览
激光/接收器系统由多个光电二极管、一个激光二极管和用于发送和接收光信号的支持电子设备组成(图 2)。
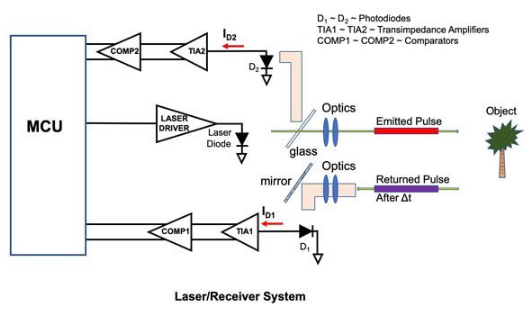
图2.激光/接收器系统将光穿过视图,以找到具有激光反射的物体。
在图2中,激光驱动器向物体发射激光脉冲,并通过D反馈一帧时间参考信号。2、TIA2 和 COMP2 到微控制器 (MCU)。激光传播到玻璃板上,玻璃板将激光信号反射到MCU,并通过发射器光学器件(指定镜头)反射。
发射的脉冲到达物体并反射到激光/接收器系统。一旦通过接收器光学器件和镜面反射,光线就会撞击InGaAs光电二极管(D1).InGaAs光电二极管是一种高灵敏度半导体电子器件,光学灵敏度带宽为1310nm至1550nm。
D上即将来临的曙光1可能明亮或昏暗,具体取决于行驶的距离。此外,大气中可能存在污染物,为了混淆系统,可能存在干扰幻影灯。该 D1将光转换为电流(ID1),它进入跨阻放大器#1(TIA1)和比较器#1(COMP1)。
光电二极管背后的大脑
TIA1 和 COMP1 是光电二极管所见内容背后的大脑。TIA1的频率带宽保持了返回脉冲上升和下降时间的完整性,并允许采集更多像素。TIA1 还可以安全地承受较大的瞬态输入过载电流并从中快速恢复。
低本底噪声可捕获物体的细节,从而为后续比较器产生准确的输出。动态范围的进一步增强包括可编程增益功能。此外,由于LiDAR系统的光前端消耗大量功率,因此将TIA1和TIA2置于低功耗模式可能是有利的。图 3 中的 TIA 设计专门解决了这些挑战。
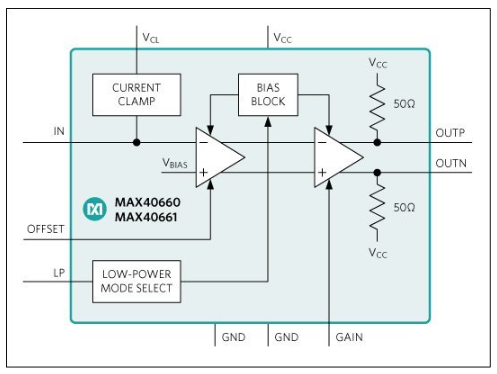
图3.MAX40660/MAX40661跨阻放大器,用于汽车LiDAR系统
MAX40661和MAX40660跨阻放大器分别提供160MHz和490MHz的高带宽。这些器件通过放大高速纳秒输入电流脉冲来提供高分辨率。2.1pA√Hz 的噪声密度可提供更高的系统精度和更长距离的操作。动态范围调整使用两个引脚可选的跨阻值:25kΩ 和 50kΩ,无需额外的放大级来匹配具有不同寄生电容的不同光电二极管。这些器件可耐受高达 2A 的输入电流 10ns,并具有 2ns 的快速过载电流恢复时间。不使用时,低功耗模式仅消耗26mW的功率。这些 IC 符合 AEC-Q100 标准,其 FMEDA 结果可用于辅助系统级的 ASIL 一致性计算。它们采用 3mm x 3mm 10 引脚 TDFN 封装,为了提高制造吞吐量,该封装具有侧面可润湿侧翼。
这些电路中的比较器 COMP1 和 COMP2 将 TIA 的模拟输出更改为干净的数字信号(图 4)。
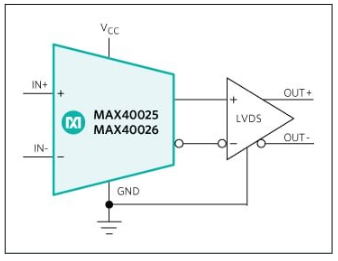
图4.MAX40025/MAX40026跨阻放大器,用于汽车LiDAR系统。
MAX40025封装采用1.218mm x 0.818mm、6焊球晶圆级封装(WLP),MAX40026采用2mm x 2mm 8引脚TDFN侧可润湿封装,符合AEC-Q100汽车认证要求。
总结
自动驾驶汽车的商业化代表着一个令人兴奋的旅程,ADAS中的LiDAR技术有望成为自动驾驶汽车未来的重要参与者。通过关注光前端的操作,本博客探讨了接收器信号链的电子元件如何在系统性能中发挥重要作用。此处重点介绍的LiDAR就绪TIA和比较器提供了LiDAR应用所需的前所未有的系统精度水平。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。