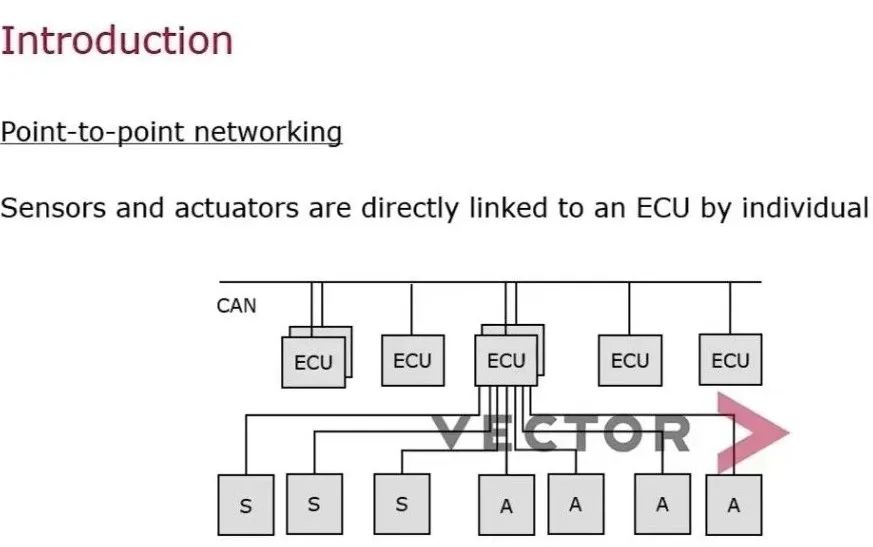
对于传统的这种点对点的连接方式,我们可以看到ECU相关的传感器和执行器是直接连接到ECU的。当传感器和执行器的数量较少时,这样的连接方式是能满足要求的。但是,随着汽车电控功能数量的不断增长,带来的是传感器和执行器数量的增长。大家可以想象,如果采用这种连接方式,会带来线数数量的增长,那由于线数数量的增长,带来的线数的加工、导线和连接器的成本都会提升,由此导致汽车成本的增加。然后就是线数重量的提高,导致汽车重量提高。当然,线数布置的空间也是一个问题。同时,由于线数和连接器端子数量的增加,也会对汽车可靠性产生不利的影响,对产生的故障进行诊断也是较为困难的。除此以外,当我们需要增加传感器或执行器时,必须要求ECU具备相应的硬件接口,那这对一个系统的扩展是非常不利的。所以,我们需要新的解决方案去应对这些问题。第一种解决方案就是将传感器和执行器直接连接到ECU所处的这条CAN总线上面。采用这种方案带来了新的问题。
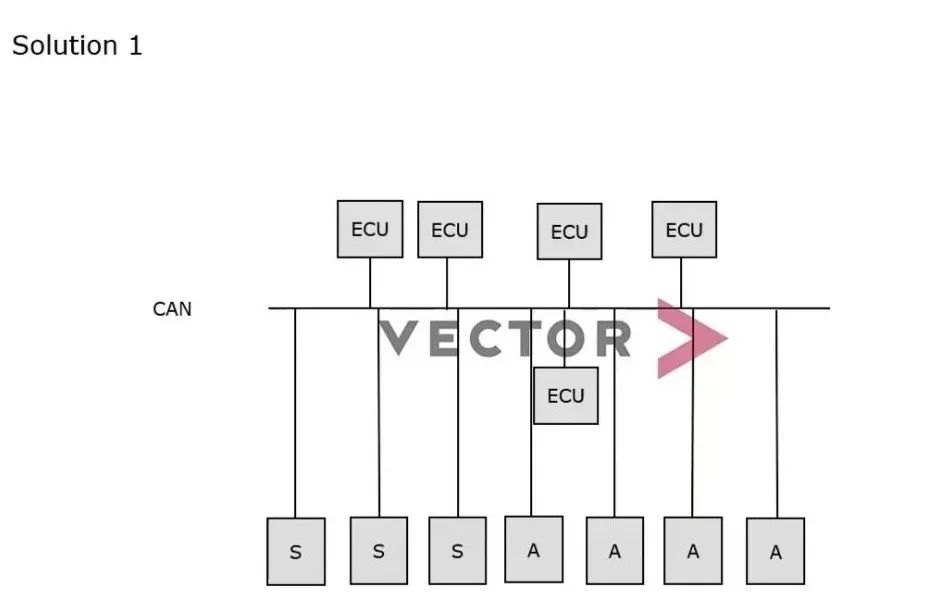
首先,这种方式要求传感器和执行器都得具备看接口,包括看收发器,看控制器。这样会导致传感器和执行器的成本大幅度的提升。同时,总线上节点的数量过多,也会导致总线负载的提升。第二种解决方案就是将传感器和执行器连接到另一条CAN总线上面。中间的ECU可以作为网关,来完成其他ECU与传感器和执行器之间的数据交互。
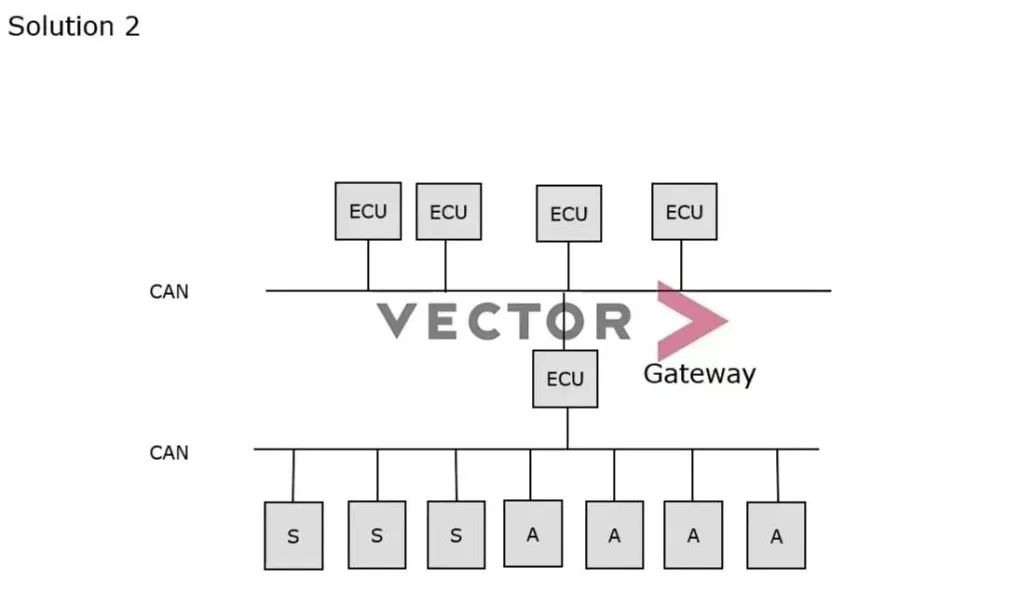
这样呢,虽然上面这条看总线的负载率不受影响,但还是无法解决看接口带来的成本问题。所以,提出了一个新的解决方案。在这个方案中,将传感器和执行器连接的CAN总线换成了一个低成本的总线。
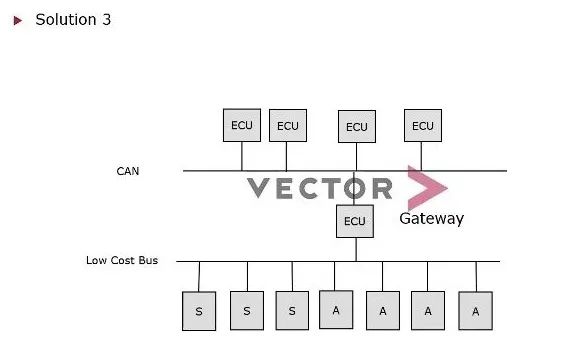
然后,中间的ECU可以实现网关的功能,实现这个低成本总线与CAN总线之间的数据交互。采用这种方式就能够解决前面提到的一些问题。这个低成本总线就是本文要讲到的LIN总线。
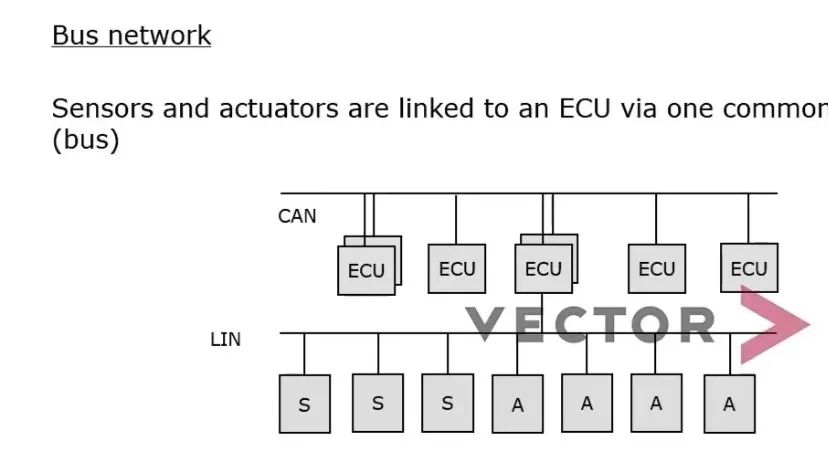
采用LIN总线以后,就由之前的那种点对点的连接方式切换为这种总线网络的连接方式。我们可以看到,传感器和执行器通过一个共用的通信介质,也就是LIN总线连接到ECU。这种连接方式具备以下的优点,首先是成本降低,然后对线数布置空间的要求和线数的重量也会降低。同时,由于线数和连接器数量的减少,可靠性也会得到提高。通过总线的连接方式,故障更容易进行诊断。最后,系统可以进行灵活的扩展。比如,现在需要增加一个传感器,我们可以将这个传感器挂在总线上即可,不需要对ECU的硬件进行相应的更改。以上就是LIN总线的简单介绍