步进电机控制解惑
1.简介
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机。步进电动机的结构形式和分类方法较多,一般按励磁方式分为磁阻式、永磁式和混磁式三种;按相数可分为单相、两相、三相和多相等形式。
步进电机价格便宜,拥有优秀的启停和反转响应,因为没有电刷,可靠性和寿命都较高,并且控制简单,由于其没有过载能力,且不能高速运行,常常被使用在低速、低负载有位置控制要求的场合,在各个领域都被广泛应用。
步距角是步进电机的一个重要参数,步距角越小步进电机的控制精度越高。例如步距角1.8°,整步驱动控制时,给1个脉冲信号,电机就转动1.8°,给200个脉冲信号,电机机械角度转动一圈。
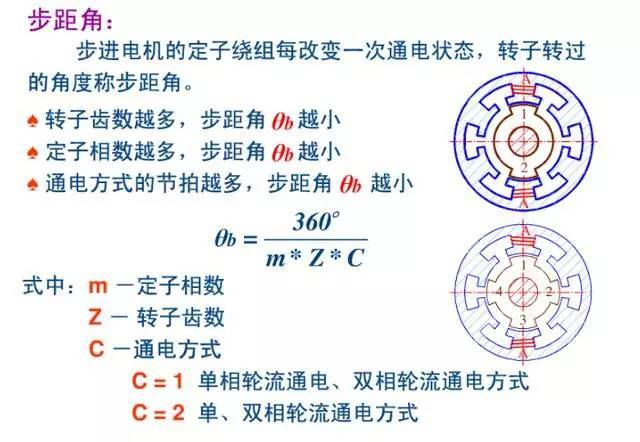
图1
2.驱动方式
步进电机种类很多,下文将介绍两相四线双极性步进电机的3种驱动方式。
整步驱动
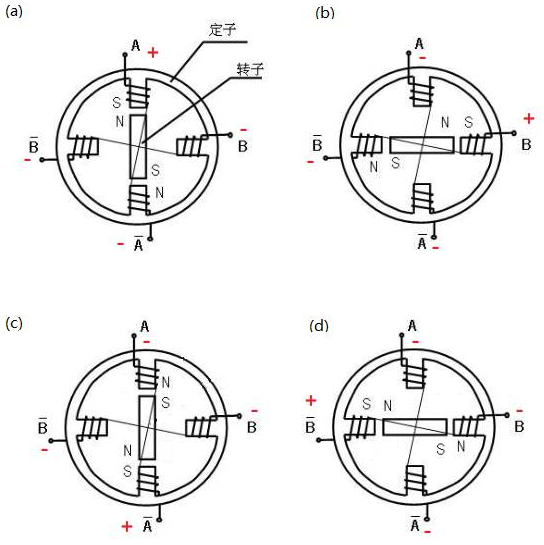
图2
整步驱动可以单拍导通或双拍导通。图2为单拍导通:A –> B -> A- -> B- -> A ,由A导通切换成B导通时((a)到(b)的过程),吸引转子转到B,因为步进电机内部有Z个齿数,这个过程实际上是最近的齿转动到B方向,即一个步距角。
双拍导通:AB –> BA- -> A-B- -> B-A -> AB ,由于两相导通,电流更大,可提供更大的转矩。导通顺序反过来即可实现反转。
整步驱动实现简单,但控制精度低且振动明显。
半步驱动
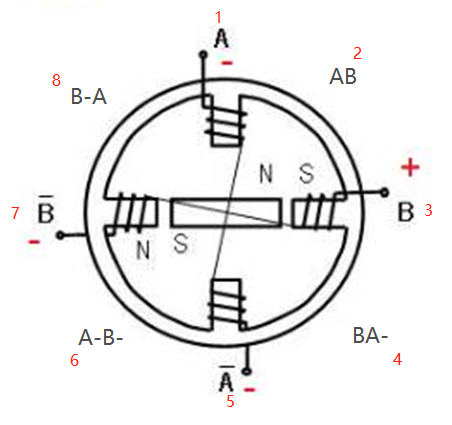
图3
半步驱动和整步驱动相似,半步驱动为单、双拍混合导通:A –> AB –> B -> BA- -> A- -> A-B- -> B- -> B-A -> A 。使用半步驱动,步距角缩小一半,控制精度提高、振动降低,但转矩不平稳。
3.细分驱动
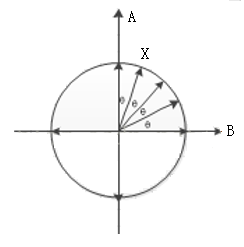
图4
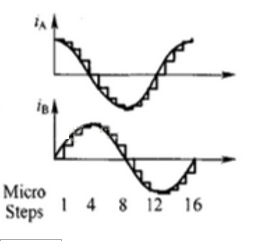
图5
步进电机的细分驱动实际上是矢量控制。图4是步进电机的四细分控制,一个步距角细分成4步,以提高控制精度,其原理为:控制A相输出电流大小为IA=I*cosθ,B相的为 IB=I*sinθ时,合成X方向,大小为I的电流,相当于合成X方向的磁场,让转子转动到X方向的位置。细分角度顺时针增大为2θ、3θ等,通过控制A、B相电流大小,合成对应角度的电流,就实现步进电机顺时针转动。因为合成磁场大小和电流大小成正比,当相电流I1=I*k时(0
高集成度电机控制芯片——NSUC1610
步进电机的实际应用除了考虑驱动方式,还需要选择一块主控芯片,不同的主控芯片的控制方案不相同。一般步进电机的控制方案为:MCU+驱动器+步进电机,由于使用驱动器,需要占用不少的板载空间,而且成本也相对较高。而使用高集成度的电机控制芯片,可以将方案简化为:MCU+步进电机,这样的方案无疑可以节省空间和开发成本。NSUC1610是纳芯微推出的一款高集成度的电机控制芯片,非常适合应用于车载步进电机控制。
1.芯片特点
ARM Cortex-M3 内核
64KBytes Flash, 4KBytes SRAM, 512 Bytes EEPROM
32MHz 高精度振荡器,35KHz低功耗低速时钟
工作电压 5.5V~18V ,可承受40V短时间过压
1个12bit 高精度1MSPS ADC
2个8bit DAC
3个快速反电势比较器BEMFC
支持3线4线SPI通信
1个LINUART模块,集成LIN PHY,支LIN2.X通信
3个16bit 输入捕获模块
2个16bit 定时器
1个窗口看门狗和1个数字看门狗
4路半桥输出 ,4路增强型互补 EPWM 输出,内部有过流保护,可输出100%占空比
每路MOUT输出电流可达1A,1个软件可控制的高边驱动
1个5V输出的LDO和1个1.8V输出的LDO
1个温度传感器 ,内部集成过温关断功能,可以保护桥臂,防止出现过温
支持环境温度-40~150,结温-40~175,全温范围内静态功耗小于50uA
QFN32封装,仅5x5mm,符合AEC - Q100

图6 NSUC1610框图
NSUC1610内部集成驱动和4路半桥,可支持驱动直流有刷电机、直流无刷电机、步进电机和继电器等。此芯片可以用来设计车用小尺寸、小功率、高效率电机智能执行器应用,例如热管理系统中的电子水阀、空调电子出风口、主动进气栅格系统执行器(AGS/AGM)、座椅通风无刷直流电机(BLDC)驱动、随灯转向大灯(AFS)、旋转/升降大屏控制、自动充电口和自动门把手等。
2.步进电机控制方案
如图7所示,NSUC1610芯片的硬件控制方案非常简单,几乎不需要搭建外部电路,LIN是直连芯片的LIN的输入引脚,不用收发器、电机驱动方式也是直连芯片。如图8为NSUC1610芯片的总线架构,芯片内核使用独立的数据总线和地址总线, 能够提高取指令和取数据的效率。 步进电机的控制使用到的关键模块为: DACCMP(BEMFC模块)、ADC、LINPORT、LINUART、TIMER0、TIMER1和EPWM模块。
其中LINPORT和LINUART用于LIN通信;EPWM用于4路MOUT的PWM输出;DACCMP用于电流控制,两个8bit的DAC用于控制A、B相的电流大小,合成相应的电流矢量以实现细分驱动;TIMER0和TIMER1可分别用于细分步的定时(控制每个细分步的执行时间)和各种任务的定时调度;ADC可用于芯片温度监测和其他模拟信号的采集。
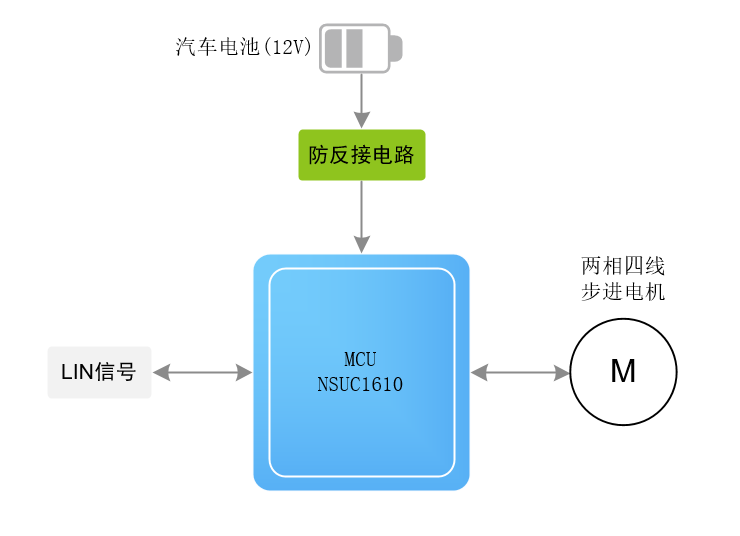
图7 步进电机控制方案框图 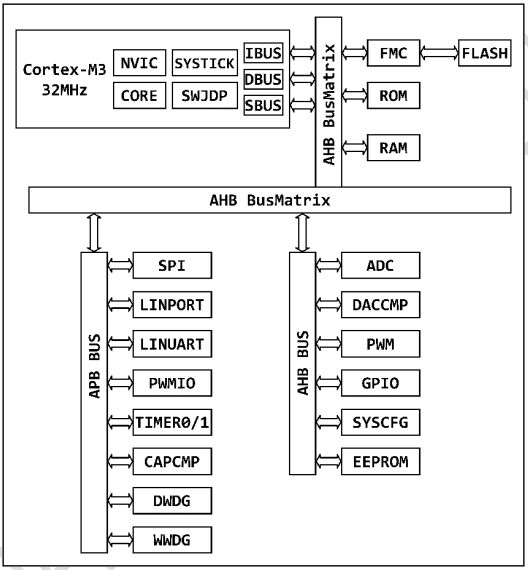
图8 NSUC1610总线架构
3.芯片优势
1. 封装小巧,内部集成4路半桥,无需外部搭建半桥电路、LIN收发器等,仅需电源防反接等少量外围电路设计,减少PCB设计成本、难度、空间。
2. 支持两相四线小功率步进电机细分控制,可支持32细分。
3. 支持小功率BLDC的无感控制和带HALL的有感控制(图9)。
4. 支持两个小功率BDC电机的控制,或一个较大功率的BDC电机控制(图10)。
5. 可配置的DAC,用于过流保护和步进电机的微步控制。具有过流保护,桥臂过流自动关断的功能。
6. 每路MOUT输出电流可达1A,内部半桥高边采用电荷泵驱动,支持100%占空比导通。
7. PWMIO可复用到LIN引脚,便于客户使用12V高压PWMIO直接来做电机控制。
8. 双路温度传感器:一个位于功率侧做过温热关断,一个位于低压侧做芯片温度检测。
9. Cortex M3处理器,编译环境采用Keil标准编译和开发工具,编程器资源通用,开发调试简单。
10. 晶圆结温高达175°C,满足车规Grade 0应用目标。
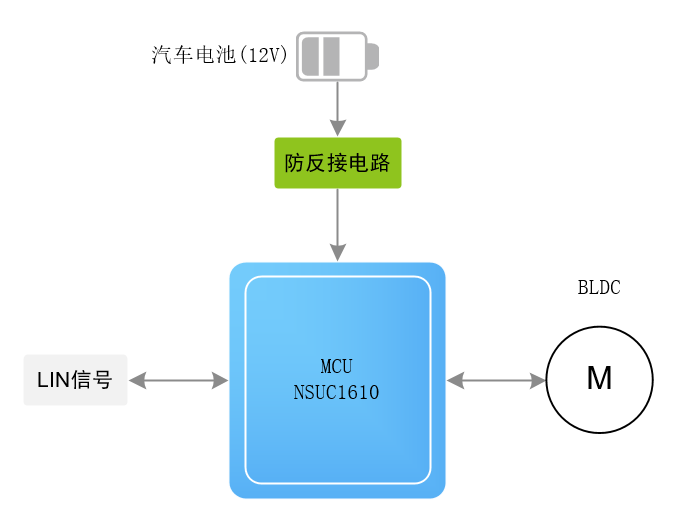
图9 BLDC控制方案

图10 两种BDC控制方案
步进电机驱动的方式多种多样,需要结合应用场景的控制精度选择不同的控制方式与主控芯片。
NSUC1610支持12V汽车电池供电,可满足大部分使用场景,有助于客户减小PCB尺寸,简化生产设计,实现更高效、更紧凑以及高性价比的电机控制应用设计。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。