作为自动驾驶应用场景中最先被推广和商业化落地的自动泊车功能,目前是在一些限定环境下实现了功能跑通。面对多种多样的复杂停车场场景,系统需要不断增强感知算法能力或寻求新的传感器技术,来提升对周围环境感知和对障碍物探测的精准度。
传统的车载毫米波雷达主要用于高速/城市行车场景下的障碍物检测,而目前,行易道科技基于车载SAR毫米波雷达成像技术,为提升高阶自动泊车能力提供了更优的选择方案,即在传统毫米波雷达硬件基础上,通过SAR算法研发实现低成本高分辨率的SAR成像效果,从而实现车辆周围环境建模、SLAM建图及辅助定位、Freespace检测、车位检测及障碍物检测等功能。
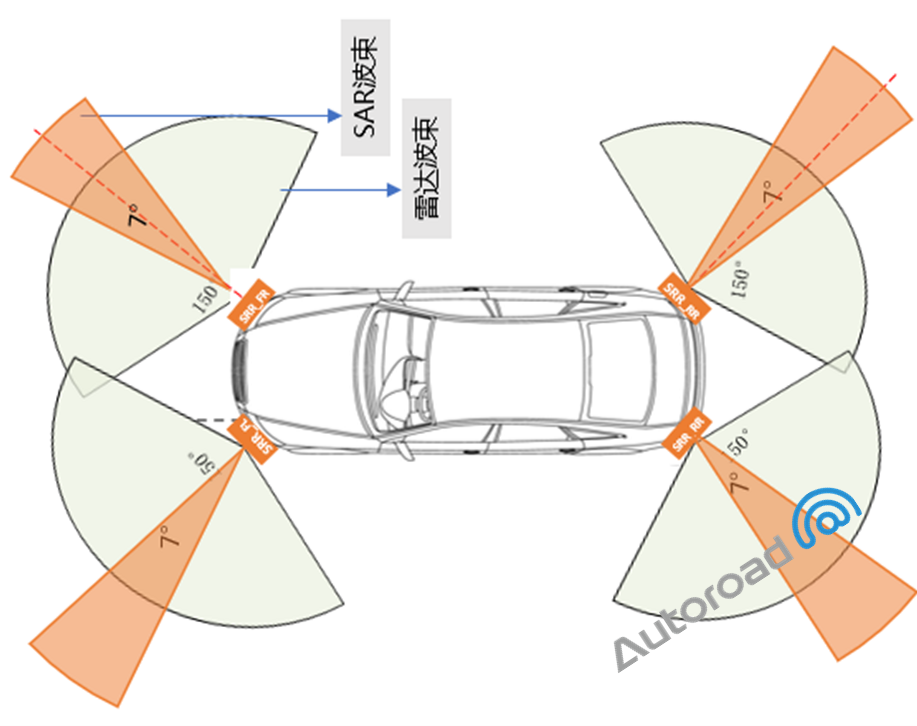
行易道SAR角雷达波束图
此解决方案的提出和实现,行易道ASSAR300产品的面市,并非朝夕间,而是缘于公司始终聚焦于技术的创新探究,同时得益于行易道产品商业化落地经验的积淀和助力。截至目前,行易道车载79GHz SAR成像雷达技术在全球范围内处于领先水平,行易道也是全球少数具有车载SAR成像技术的公司,在国内领先实现成型产品。自2016年开始,行易道首次开发出第一款车载79GHz SAR雷达;2018年,实现车载实时SAR成像;2019年实现实时SLAM,在世界新能源汽车大会上获评“全球新能源汽车前沿技术”;2020年发表2篇IEEE会议论文(The IEEE 11th Sensor Array and Multichannel Signal Processing Workshop (SAM) ;IEEE MTT-S International Conference on Microwaves for Intelligent Mobility ),2022年获得4项算法发明专利。
ASSAR300产品在技术方案上,基于FMCW+SAR(调频连续波+合成孔径雷达)技术,3T4R实现SRR(ADAS功能),1T1R实现SAR成像(增强高阶APA功能)。通过SAR成像,可以及时处理复杂的交通状况,在SAR成像辅助实现高阶APA泊车功能上独具优势。

行易道SAR成像实测图
● 基于SAR成像实现车辆周围环境建模、SLAM建图及辅助定位,作为基于摄像头的SLAM建图 及定位能力的补充,将有力增强整车地图元素的丰富度和定位的准确度;
● 基于SAR成像实现FreeSpace检测,作为环视相机的异构冗余,与环视FreeSpace进行融合,不仅可以提高FreeSpace的探测距离,还可以提高FreeSpace边缘检测精度,将极大的提升泊车可行驶区域的安全性;
● 基于SAR成像实现车辆侧前方/侧后方近距及中距障碍物检测,以及SAR成像对障碍物测高功能的实现,对于低矮障碍物(路沿、地锁、阻车器、台阶等)的检测可以对障碍物进行精细化分类,与环视障碍物检测结果和超声波障碍物检测结果进行融合,进一步提升泊车安全性和舒适性;
● 基于SAR成像可识别空间车位,并推算空间车位几何形状,增强空间车位检测的准确性:SAR雷达可与摄像头融合,识别可停靠空白位置,基于视觉对车位检测的结果,与SAR成像推算的车位几何进行融合;
● 基于SAR成像对高阶APA能力的增强,可以将泊车场景扩展到住宅小区、道路靠边停车、空旷停车场等。
此外, ASSAR300产品在性能方面极具市场竞争力:
● 基于传统角雷达产品,实现SAR成像的角雷达产品的无感升级;同时借助于算法优势,SAR成像效果适应更低车速(>0km/h),成像实时性更高(<20Hz),实现0.06°的水平角分辨率。
● 环境感知能力更精准:可以检测目标的尺寸形状,全面感知周围环境细节,精确描绘周边障碍物的边缘轮廓,可以识别凹陷或松散的路肩、泊车路径附近较小的物体。随着行易道公司车载SAR技术的深入应用,ASSAR300产品将会被挖掘出更多的高阶泊车场景,和行车场景。
行易道公司于2023年实现了成像毫米波雷达产品突破,基于FMCW体制的4D成像雷达产品ALRR300,实现密集点云输出,预计10月量产,目前已经开始给国内外客户送测;基于SAR成像技术的的产品ASSAR300,是满足行泊一体智能驾驶方案的传感器,目前客户积极踊跃,对于毫米波雷达产品的新应用充满期待。
行易道厚积薄发,在车载毫米波雷达技术领域拥有多年积累,随着成像雷达时代的来临,行易道凭借优秀的产品,在市场上定会大放光彩!