辅助驾驶功能的分级
0. 前言
刚刚过去的2023上海车展我自然不会错过,除了给公司站台,就是把辅助驾驶相关的参展商仔细逛了一遍,尤其是自动驾驶域控制器。于是想写这篇文章,和大家交流一下感想。我会努力用一个简单的逻辑,站在系统的角度,把自动驾驶域控制器要做什么、要怎么做进行以及目前流行的方案做一个梳理。由于很多读者朋友是学生或者刚转行不久的新人,和以前一样,我会尽量把文章写得浅显一些,并且铺垫多一些。有相关经验的同学可以直接跳第四章。
在汽车领域,分析或者介绍一个控制器,一般都从其最顶层需求(功能)入手。对自动驾驶域控而言,它的顶层需求是“实现一定的辅助驾驶功能”,一切都是为这个目标服务的。受制于成本,不同的域控能实现的功能自然是不同的,于是对辅助驾驶功能需要分级介绍;为了实现这些辅助驾驶功能,还需要有不同的传感器配置方案作为基础;基于不同的传感器配置,要选择与之相匹配的自动驾驶芯片,确保芯片算力能够实时处理传感器的海量数据;最后,不同的自动驾驶芯片进行各种排列组合,就形成了目前行业内琳琅满目的自动驾驶域控方案。以上,就是这篇文章介绍域控制器的逻辑主线。
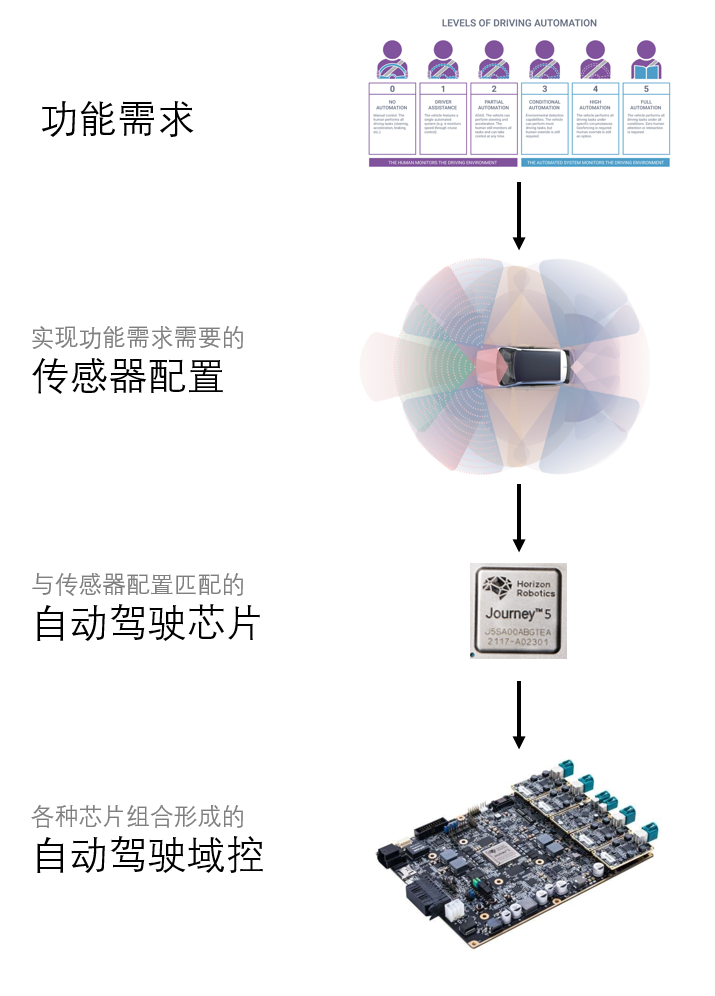
图1.逻辑主线
对于术语称呼,标题里说的“自动驾驶域控制器”,Advanced Driver Assistance System Domain Controller,严格来说得叫“辅助驾驶域控”或者“智能驾驶域控制器”,因为业界对ADAS和AD还是有比较明确区分的。但是似乎大家都叫“自动驾驶域控”,所以后面我就不严格区分了。
1. 辅助驾驶功能的分级
近年只要是关注汽车行业的,大多都听说过SAE对自动驾驶进行的L0至L5的分级定义[1]。
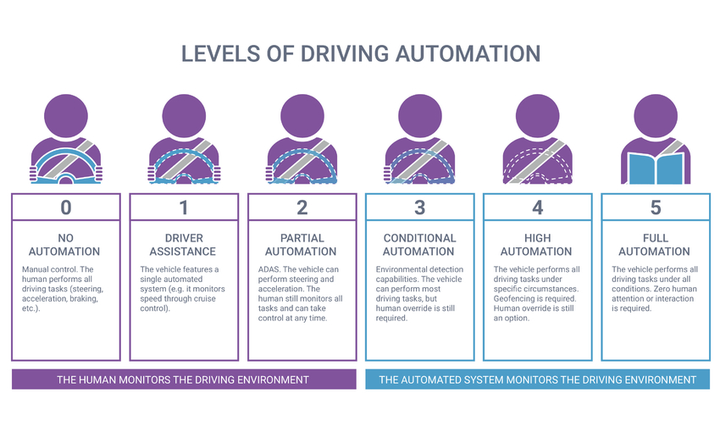
图2. SAE自动驾驶分级
相关介绍文章很多,不再赘述。这里我想结合业界各家公司的实际宣传现状,做一个新分类。目前在国内市场能实际买到的车型中,对自动驾驶类功能的丰富程度也可以分成五级:
1.1 实现L1和最基础的L2功能
行车功能主要包括:
ACC自适应巡航(全速域/非全速域)
FCW前向碰撞预警
AEB自动紧急制动
LDW车道偏离预警
LKA车道偏离辅助
LCC车道居中保持
泊车功能包括全自动泊车。
做到这些,整车厂就会宣传车辆具备“L2辅助驾驶功能”。一般市面上十至十五万级的车型都会配置。便宜一点的例子比如吉利帝豪S[2]这种十万级车型也有(你没看错,现在十万的车型就有辅助驾驶了,卷出了天际)。需要注意的是,实现这些功能一般不需要自动驾驶域控制器。
图3. 帝豪S
1.2 实现大部分L2功能,厂家宣传“L2+”
行车功能主要包括:
ACC自适应巡航(全速域)
TJA交通拥堵辅助(ACC+Stop&Go+循前车轨迹)
ALC拨杆变道辅助
FCW前向碰撞预警
AEB自动紧急制动
RCW后方碰撞预警
RCTB后方横穿制动
LDW车道偏离预警
LKA车道偏离辅助
LCC车道居中保持
ESA紧急转向避障
BSD盲区预警
TSR交通限速识别
泊车功能包括APA全自动泊车和RPA遥控泊车。
虽然丰富了不少,但严格来说这些功能就是L2而已,但市场宣传方面总得体现出和十万级车型有区别吧,于是生造了个"L2+"的概念。具体车型例如领克01[3]。车价也来到了十五至二十万这个量级。一般从这个阶段开始,自动驾驶域控开始上车了。
图4. 领克01
1.3 实现L2+高速NOA
这一级车型,行车功能包括以上全部,加高速领航辅助,即高速NOA。泊车功能有的还会增加记忆泊车HPA等。很遗憾,这些功能还是属于L2,但是车企这里就开始玩花活了,什么“L2++”、“L2.5”、“L2.9”还有什么“L2.99”都来了。目前能实现高速NOA功能的车型都在二十万以上的。典型车型包括蔚来、小鹏、理想等等这些造车新势力的绝大部分车型。比如蔚来EC6[4](得选配大NP包)。
图5. 蔚来EC6
1.4 实现L2+高速NOA+城区NOA
这一级车型,行车功能包括以上全部,加城区领航辅助,即城区NOA。泊车功能基本与以上相同。进行了城区NOA硬件预埋的车型一般都在二十五万以上。事实上目前(2023年5月3日)推送了城区NOA功能的就只有小鹏G9、P7i[5]和P5(上海、广州、深圳)以及北汽极狐阿尔法S·HI版(深圳、上海)、阿维塔11(深圳、上海)这5款车。当然,其他包括蔚来、理想、智己、广汽埃安等等一堆车企都宣称会“很快”推送城区NOA。
图6. 小鹏P7i
1.5 实现L3
这个不用多说了,量产实现L3功能的全球目前就奔驰S级(包括EQS)这一款车。另外一个本田Lengend只租不卖、而且产量也很小,感觉更多像是一个噱头。我在德国的时候恰好参与了Drive Pilot[6]中一部分横纵向控制功能(DTRQ+, Diamler的小伙伴们肯定知道)的量产设计工作,不过没等量产我就撤了。感觉最后量产的性能和最初的设计要求相比还是做了妥协。
图7. 奔驰S级,来源Drive Pilot官网
1.6 实现L4/L5
另外,目前还没有真正量产实现L4功能的车型。通用汽车Cruise[7]倒是在美国旧金山、奥斯丁和凤凰城三个地方开始了全无人商业出租车运营,但是都只是在晚上至凌晨运营,数量也比较有限。而且这外形一看就离大规模量产还很远。。。这种情况我们就不讨论了。
图8. Cruise Poppy,来源Cruise官网
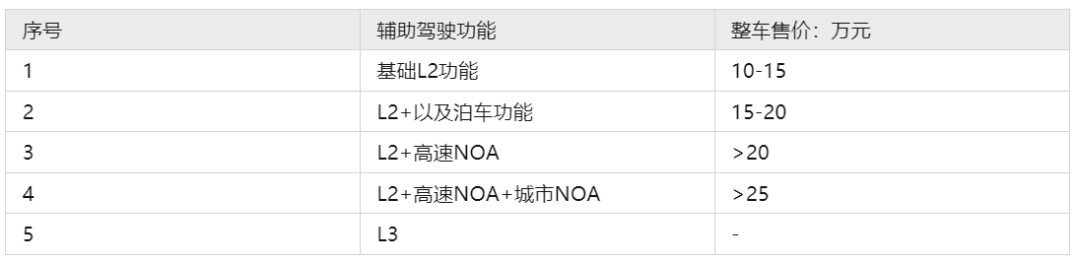
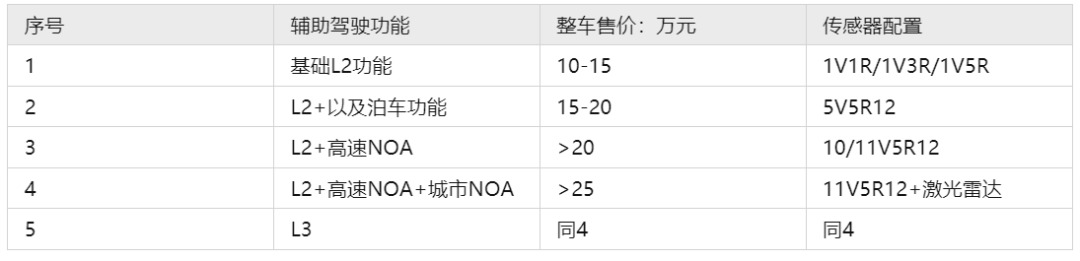
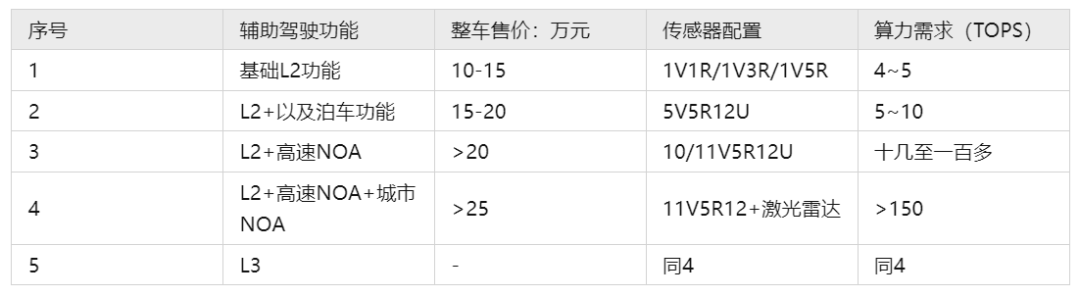
总结一下,根据辅助驾驶功能的丰富程度,我们可把辅助驾驶分成以下五级(不考虑L4/L5):
表1:辅助驾驶功能
2. 辅助驾驶系统传感器配置
上面把量产车型的辅助驾驶功能分了五个等级,每个级别的功能需要通过不同的传感器配置方案来实现。当然每个级别的传感器方案不是唯一的,不同级别之间方案也有可能共用或者重叠。需要强调的是,实现辅助驾驶功能不是靠堆传感器。传感器只是整个自动驾驶系统中的一小环。限于篇幅这里就不展开了。
我们这里挑一些最典型的情况介绍。
2.1 基础L2的传感器配置
实现基础L2功能一般通过1V1R,即一个前视摄像头和一个前向毫米波雷达就可以实现了。摄像头负责前方车辆、弱势交通参与者、车道线等的识别,毫米波雷达进行感知融合。追求极致性价比的车型,只通过一个高清摄像头也行,无非就是不融合了,性能表现稍微差点意思。常见的其他配置还包括1V3R(在1V1R基础上增加两个后雷达以获得有限的后方感知能力)、1V5R(在1V3R基础上再增加两个角雷达)。
对于泊车功能,为了追求性价比,一般会搭载12个超声波传感器(USS)(下图没画出来)。

图9. 1V1R方案
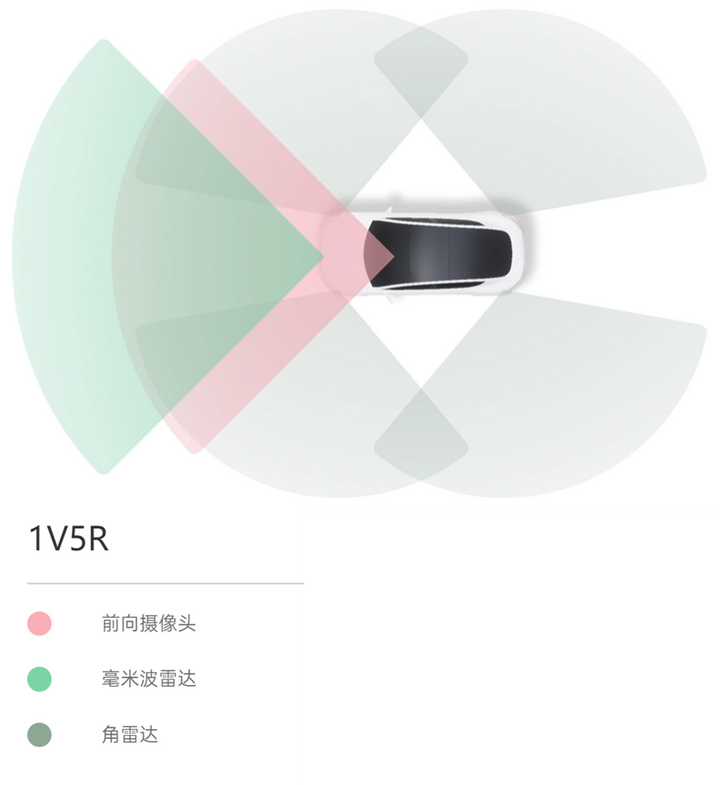
图10. 1V5R方案
图片来自佑驾创新Minieye官网[8]
前面提到过,这么简单的传感器配置,算力要求不高,再加上突出性价比,一般也就不需要域控制器了,行车和泊车的控制也是完全分离的。
2.2 L2+的传感器配置
要实现这些功能,典型的传感器配置是5V5R12U。即在1V5R12U的基础上,再增加4个广角环视摄像头。

图11. 5V5R12U方案
图片来自佑驾创新Minieye官网[9]

图12. 环视摄像头布置,图片来源网络
如上图示,通过在车辆前保、后保/后尾门上方、左右后视镜下方布置四个广角环视摄像头,可实现车辆近距离360度感知、可用以实现自动泊车,结合四个角雷达,能实现对行车盲区以及后方来车的监控,最终实现L2+的功能。
2.3 L2+高速NOA的传感器配置
实现高速NOA的方案也比较多。典型的方案是11V5R12U,或10V5R12U即在5V5R12U的基础上,再增加一颗(或两颗)前视摄像头(长焦/主视)、一颗后视摄像头和四颗周视摄像头。
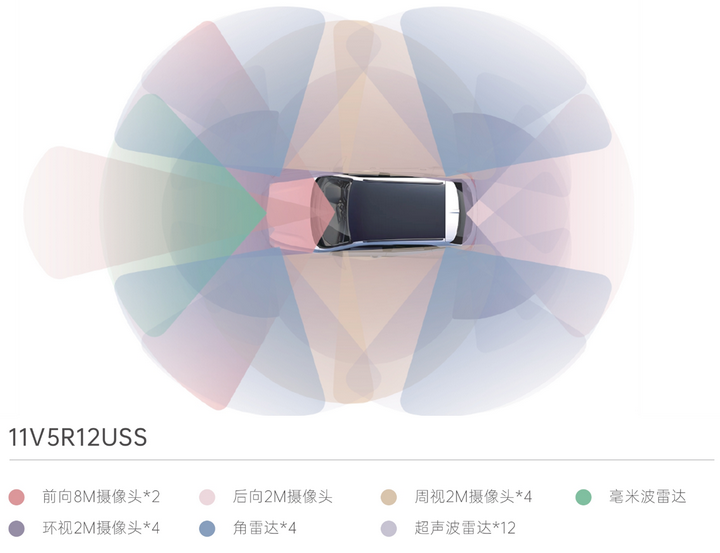
图13. 11V5R12U方案
图片来自佑驾创新Minieye官网[9]
其中,周视摄像头一般放置在前翼子板或者转向灯下方,用于进一步增强侧向盲区感知、对车辆加塞进行感知等等。例如,下图是我在上海车展上拍的阿维塔11的摄像头布置。类似的摄像头布置在哪吒S、小鹏P7i等车型上都有应用。
图14. 阿维塔11的侧面摄像头布置,上海车展拍摄
图15. 小鹏P7i的11V摄像头(不包括驾驶员监控)布置,来源官网
但是就像我前面提到的,传感器方案不是绝对的。比如吉利博越L使用6V5R12U(没有布置周视摄像头)的方案也实现高速NOA.
2.4 L2+高速NOA+城市NOA的传感器配置
目前市场上量产实现城市NOA、或者对城市NOA进行了硬件预埋的车型,典型比如蔚小理、华为智选等等的车型,在实现高速NOA的传感器配置基础上,又加装了激光雷达。不过有的比如蔚来ET7、理想L9等使用了一颗前向激光雷达、装在前侧正面上方;小鹏P7i使用了两颗激光雷达,装在前保两侧;阿维塔11装了三颗激光雷达,分别位于正面和左右翼子板。
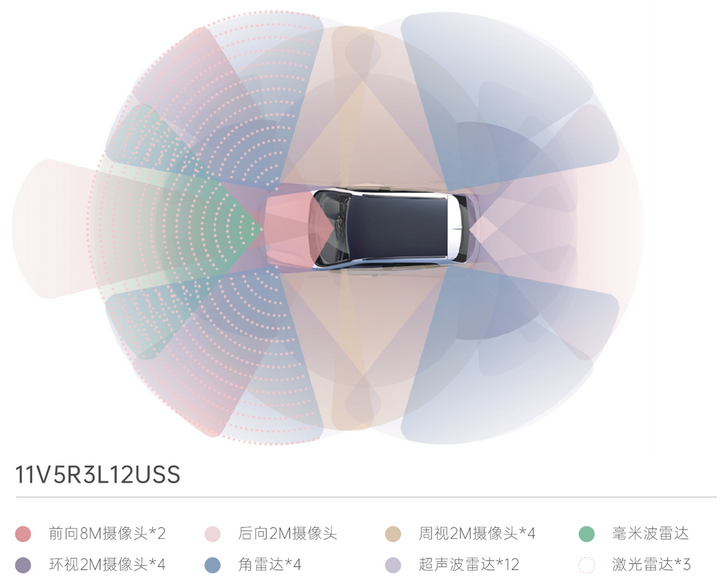
图16. 典型的实现城市NOA的传感器配置
图片来自佑驾创新Minieye官网[9]
激光雷达这东西我没实际上手玩过,说实话不了解为什么非得加激光雷达。据我所知现在各家激光雷达厂商都在血亏硬着头皮卖激光雷达给这些主机厂,分明是不可持续的。
2.5 实现L3的传感器配置
实现L3自动驾驶的瓶颈不在传感器。以上的传感器配置很多都是可以满足L3需求了。事实上,奔驰DRIVE Pilot的传感器布置是6V5R12U[10],还不如国内很多车型丰富。当然,奔驰DRIVE Pilot也不支持城区NOA。
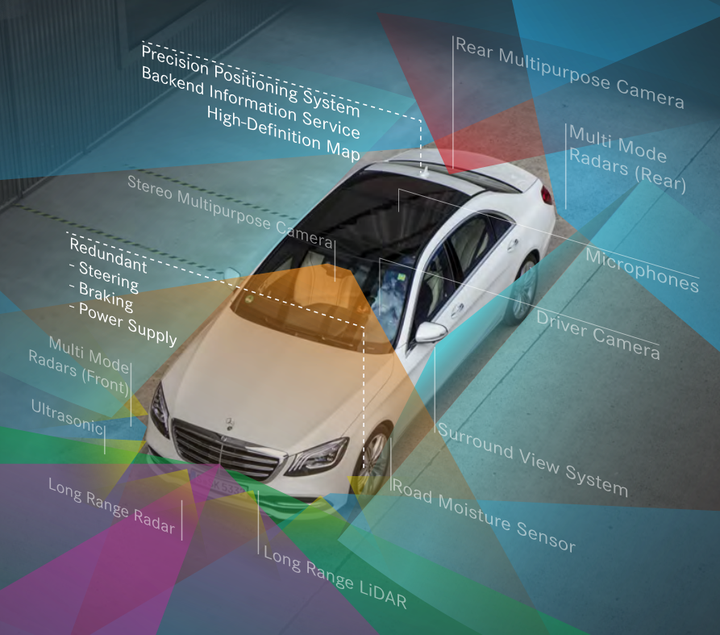
图17. 奔驰L3自动驾驶Drive Pilot传感器布置方案,来源官方手册
总结一下,根据实现不同辅助驾驶的功能,传感器配置有很多种方案。为了展示明晰,我们有如下几类典型的传感器配置:
表2.典型传感器配置
3. 自动驾驶的灵魂——自动驾驶芯片
3.1 自动驾驶芯片规格和市场划分
前面说完了实现不同辅助驾驶功能需要的传感器配置。很显然,不同的传感器配置所需要的处理算力也是不一样的。按照前面对辅助驾驶功能的分类逻辑,对应到传感器方案,我们可以延续将域控制器的算力需求归纳成几类:
1V1R/1V3R/1V5R方案:最少需要4-5 TOPS算力;
5V5R12U方案:最少需要5-10 TOPS算力;
11V5R12U方案:这就不好说了,各家差异很大,一般需要十几到一百多TOPS算力;
11V5R12+激光雷达方案:业内一般认为最少需要150TOPS算力;
这个不好说,这篇文章就不讨论了。
有了以上这些基本的概念,自动驾驶域控制器即可依此进行芯片选型了。为了获得相应算力,设计自动驾驶域控时可以选择:
由多个低算力芯片叠加获得所需算力;
直接选择单个中高算力芯片获得所需算力。
当然,实际芯片选型要考虑的事情比这个多得多得多,限于篇幅这里不展开。那么现在市面上有哪些自动驾驶芯片呢?这又是一个卷得让人怀疑人生的市场:
表3. 常见自动驾驶芯片汇总
| 序号 | 公司 | 芯片 | 算力 | 制程 | 量产时间 |
|---|---|---|---|---|---|
| 1 | NXP | S32V | 4 | 16 | 2022 |
| 2 | TI | TDA4VM* | 8 | 16 | 2020 |
| 3 | TI | TDA4VH | 24-32 | 16 | 2023 |
| 4 | Mobileye | EyeQ5* | 24 | 7 | 2021 |
| 5 | Nvidia | Xavier* | 30 | 12 | 2020 |
| 6 | Nvidia | Orin* | 254 | 7 | 2022 |
| 7 | 高通 | Snapdragon Ride Flex 系列 | 几十至几百不等 | 5 | 2022 |
| 8 | 安霸 | CV22系列 | 等效算力10-20TOPS | 10 | 2019 |
| 9 | 安霸 | CV3-AD系列 | 等效算力500TOPS | 5 | 2022 |
| 10 | 安霸 | CV72系列 | 多种算力 | 5 | 2023 |
| 11 | 华为 | 昇腾310 | 16 | 12 | 2018 |
| 12 | 华为 | 昇腾910 | 640 | 7 | 2022 |
| 13 | 地平线 | J3* | 5 | 16 | 2020 |
| 14 | 地平线 | J5* | 128 | 16 | 2022 |
| 15 | 地平线 | J6 Family | 数百至一千 | 7 | 预计2024 |
| 16 | 黑芝麻 | A1000L | 16 | 16 | 2020 |
| 17 | 黑芝麻 | A1000 | 40 | 16 | 2020 |
| 18 | 黑芝麻 | A1000Pro | 106 | 16 | 2022 |
| 19 | 寒武纪行歌 | SD5223 | 16 | 不详 | 不详 |
| 20 | 寒武纪行歌 | SD5226 | 400 | 7 | 不详 |
| 21 | 芯驰 | V9P | 20 | 16 | 2023 |
| 22 | 零跑(大华) | 凌芯01 | 4.2 | 28 | 2020 |
| 23 | 超星未来 | 惊蛰 R1 | 16 | 不详 | 不详 |
别看芯片种类琳琅满目,其实“目前”市场占有率高的芯片并不多,基本就是我在表中打了星号的这几款:TDA4,EyeQ5,Xavier,Orin,J3和J5。当然,未来这个市场是什么情况不好说。
从表中,我们可以粗略地把自动驾驶芯片按算力分成几个市场:
中低算力市场:十几TOPS以下,主打一个性价比。主要玩家是地平线J3、黑芝麻A1000L、TDA4VM等,互相有很强的可替代性,基本上是杀红了眼的存在;
中端算力市场:大几十到一百多TOPS,包括地平线J5、黑芝麻A1000、高通平台系列芯片等等,这个市场目前地平线J5占据了较大优势,但是高通势头很猛;
高算力市场:Nvidia Orin,目前好像没什么对手。
其他的什么地平线J6系列、黑芝麻A2000、Nvidia Thor之类的超大算力芯片,目前资料太少,不在分析的范围内。
总结一下,根据辅助驾驶功能的丰富程度、对应不同传感器方案,可将域控算力需求进行分类如下:
表4.自动驾驶域控制器典型算力需求
3.2 自动驾驶芯片的设计和架构
另外这里我想特别提醒的是,芯片设计、域控选型涉及到一个“鸡生蛋,蛋生鸡”的问题。它绝对不是芯片公司关起门怼几个芯片出来,然后域控制造商就像点菜一样拿着菜单选。
自动驾驶芯片在设计的时候,就要和主机厂、Tier1充分沟通,一定是要站在系统的角度,通盘考虑自动驾驶功能、传感器方案、整车E/E架构、软件架构、功能安全、信息安全、域控硬件设计、可测性等等之后,才能形成最优设计,这其中牵扯到几乎是汽车产业全方面的资源协调。这也是为什么我们经常在新闻里看到某芯片厂商、Tier1、整车厂又搞战略合作又搞联合发布等等。芯片设计是“攒局”,从来都不是“单打独斗"。所以说,芯片是自动驾驶的灵魂呐。
图18. 地平线J5芯片
下面我们把一片自动驾驶芯片打开,看看它的系统框图。这里就以今年最火的地平线J5为例。
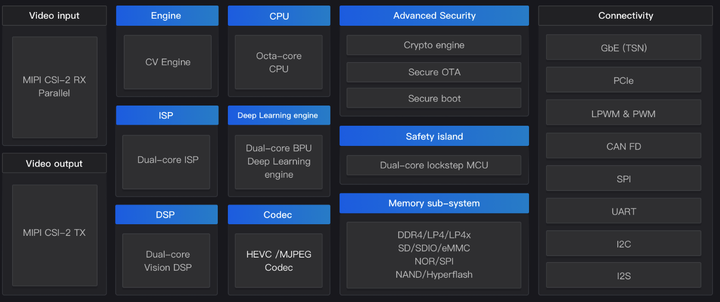
图19. 地平线J5系统框图
图片来自地平线官网[11]
从上图我们可以看到地平线J5内部分成几个大块,也是典型的自动驾驶芯片配置。其从左到右、从上到下依次是:
图像输入/输出单元
CV引擎
两个ISP(Image Signal Processing)核
两个DSP核
8个ARM A55核构成的CPU单元
两个AI深度学习计算核心BPU
视频编解码单元
信息安全单元
锁步核MCU构成的安全岛
内存和存储单元
外设接口单元
其中BPU负责AI深度学习的计算,A55负责一般的逻辑计算,比如传感器融合,MCU负责进行高功能安全等级的逻辑判断、诊断等等。
再比如从TDA4VM的系统框图中,也能看出它包含图像输入输出编解码单元、DSP核、用于进行深度学习的MMA(Matrix Multiplication Accelerator矩阵乘法加速器, 类比于地平线的BPU)、2个高性能A72核、6个R5核,其中有一对锁步R5核位于安全岛、信息安全单元、内存/存储和外设接口。这类异构SoC(将A核/R核/M核/DSP/深度学习加速器等等集成在一个SoC中)在基本单元上是有很强共性的。
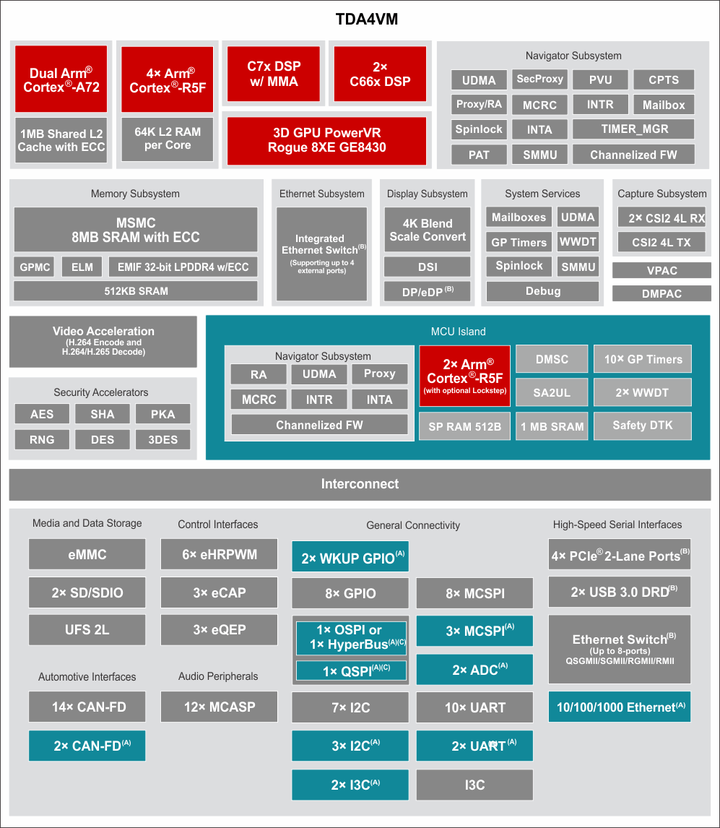
图20. TDA4VM系统框图
图片来自德州仪器官网[12]
4.自动驾驶域控制器
4.1 自动驾驶域控控制器的典型框图
首先介绍一下典型的自动驾驶域控制器构成。
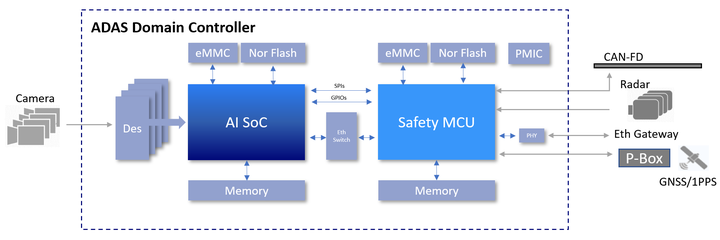
图21. 自动驾驶域控制器的典型系统框图
一般而言,一个自动驾驶域控包括以下部分:
自动驾驶芯片,也就是AI SoC (System on Chip),它主要用来进行摄像头图像处理,通过深度学习算法,输出目标识别列表,也可以用来实现传感器融合、轨迹预测、环境模型搭建、自车定位等功能。
Safety MCU,用来进行高功能安全等级的逻辑运算。一般车辆的规划与控制、通信、诊断以及域控制器的对外接口等功能会运行在MCU中。这里有人可能会问,自动驾驶芯片中不是自带安全岛(也就是锁步核)嘛,为什么还需要外置MCU?诚然,对于一部分应用场景而言,自动驾驶芯片内置的安全岛确实够用了,这就是后面会提到的域控制器“单芯片”方案;但是对于复杂一些的场景,内置安全岛的算力就不够了,智能通过外置MCU来实现。
eMMC/Nor Flash/Memory,存储芯片;
Des 视频解串芯片,将摄像头的原始图像解串供自动驾驶芯片处理;
以太网网关芯片;
各种外设接口芯片、电源管理芯片(PMIC)等。
后面我们会看到域控制器方案具体会有很多种形态,但是无非就是这些典型内容的排列组合。
4.2 自动驾驶域控制器的方案
这里我们继续参照前面对自动驾驶功能的分类逻辑为主线来梳理。
4.2.1 实现基础L2功能:
1V1R/1V3R/1V5R感知方案,最少需要4-5 TOPS算力。这个需求一般就通过低成本的前视一体机或者智能摄像头搭配毫米波雷达来实现。一般基于J2、J3或者Mobileye的各种中低算力芯片设计,不需要配置域控制器。主控ECU可以是前视一体机,在有些方案(比如博世的一些古早的方案中)甚至可以是雷达。
例如大陆Conti基于J3芯片设计的前视一体机,目前已在十五万级的长安深蓝SL03上量产。另外前文提到的十万块的博越S,也通过装配博世智能摄像头+毫米波雷达来实现基础L2功能。
图22. 大陆芯智驾8M像素前视一体机,来源网络
这类方案中,如果车辆还具备泊车功能,一般就是通过另一个单独的泊车控制器来实现,不再展开。
4.2.1 实现L2+以及泊车功能:
5V5R12U感知方案,最少需要5-10 TOPS算力。从这里开始,域控就进入了主战场。今年还开始流行通过“分时复用”等等方式极简压缩芯片数量和成本。于是这类型的域控也就相应的有下面一些典型方案:
i) 单TDA4行泊一体方案
使用一颗TDA4来实现行泊一体,用TDA4自带的MMA做深度学习计算、视觉处理等,用一对高性能A72核做传感器融合、环境建模、轨迹预测等,再使用TDA4自带的R5锁步核实现车辆规控、以及自动泊车等功能(参见前文TDA4VM系统架构框图)。
例如福瑞泰克ADC15就采用这样的设计思路:
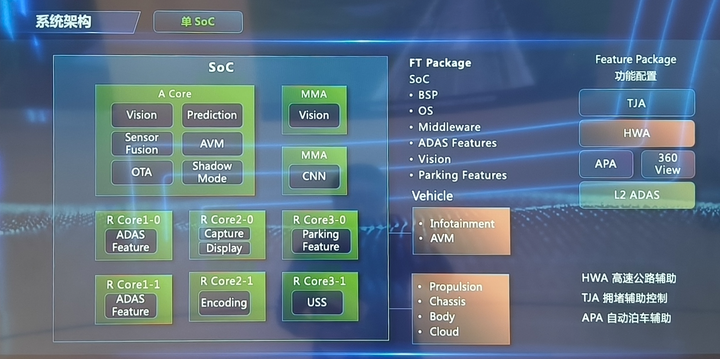
图23. 福瑞泰克ADC15行泊一体域控系统架构,上海车展拍摄
除了福瑞泰克,采用单TDA4自动驾驶域控方案的厂商很多:德赛西威[13]、MAXEYE[14]、知行科技[15]、易航智能、东软睿驰、Minieye等等都有相关产品,但是可以想象对于这种硬件方案,软件开发的难度是非常高的。硬件倒是简化了,如果软件玩不转也是不行的。有消息称福瑞泰克以后单SoC方案也要改成基于单J3[16]。
图24. 知行科技单TDA4行泊一体域控IDC Mid
ii) 单J3+MCU方案
宏景智驾是业内第一个推出单J3行泊一体域控的厂家[17],因为J3本身不带锁步核(内部只有一个R5核),为了满足功能安全的要求,使用单J3一般都得外挂一个MCU做规控/通信/诊断,TC297/TC397是常见的选择。今年车展上本土芯片厂商异军突起,也有J3搭配芯驰E3(芯驰E3本身也是基于R5核设计的[18])作为MCU的解决方案。
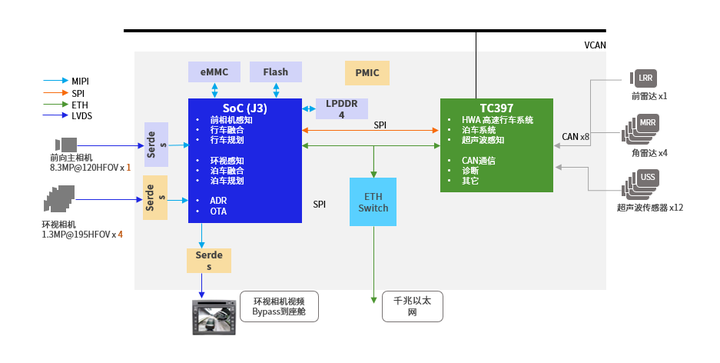
图25. 单J3+MCU(TC397)架构框图,来自映驰科技官网
其他类似产品还有Minieye的iPilot 2[9]、以及映驰科技为哪吒U-II量产的单J3行泊一体域控[19]、纵目科技Amphiman3000、四维图新行泊一体(单J3+瑞萨RH850)、禾多科技HoloARK1.0单J3版等等。
图26. 宏景智驾单J3行泊一体域控
iii) 单黑芝麻A1000L+MCU方案
把J3换成了黑芝麻A1000L,搭配TC397。域驰智能IDDC行泊一体域控采用了这个方案,最多支持2路8M/2M摄像头和4路2M/1M环视摄像头。保隆科技也有一款同方案域控展示。框图我就不放了。感觉距离量产还远了去了,不是主流方案。
除此之外单小算力芯片+MCU的方案还有很多,比如大家比较熟悉的Mobieye EQ3/EQ4等等,甚至还有用FPGA的,比如博世已作古的域控制器DASy。
4.2.2 实现L2+高速NOA功能:
典型为11V5R12U方案,十几到一百多TOPS算力需求。前面提到过,要获得这些算力,可以堆小算力芯片或者选大算力芯片。
需要说明的是,有的车型20万不到也提供城市NOA功能。其中已经量产的就有吉利博越L,使用6V5R12U方案:取消了周视摄像头,增加了一个250万像素后视摄像,环视升级成3百万像素[20]。博越L域控制器使用了J3+TDA4的架构。
i) J3+TDA4方案
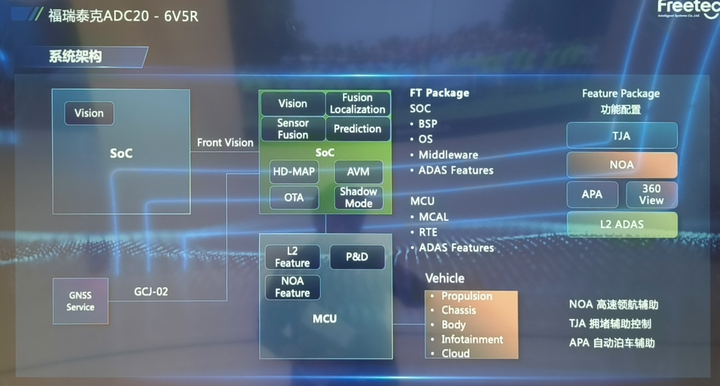
图27. 福瑞泰克ADC20域控架构框图,上海车展拍摄
在这个架构下,J3用于处理前视摄像头,TDA4用来处理环视、感知融合、高精地图定位等等,MCU(TC397)实现规控。
多说一句,除了博越L,还有其他车型也使用6V5R12U的传感器配置,比如威马W6(双目前视:主摄像头+远焦摄像头)[21]、五菱Kiwi EV(双目两百万前视)[22]不过貌似他们目前没有提供高速NOA功能。PS:威马都凉了估计是提供不了了吧....
ii) 双TDA4方案
把J3换成TDA4,就有是双TDA4行泊一体方案,这也是很流行的架构设计。百度ANP2.0[23]、大疆智能D80方案[24](五菱Kiwi EV量产使用)、MAXEYE、易航智能(雷诺江铃-羿 、上汽大通等量产使用)都有双TDA4架构的产品。甚至TI官方都给出了使用双TDA4实现前视、环视、周视融合的应用建议手册[25]。
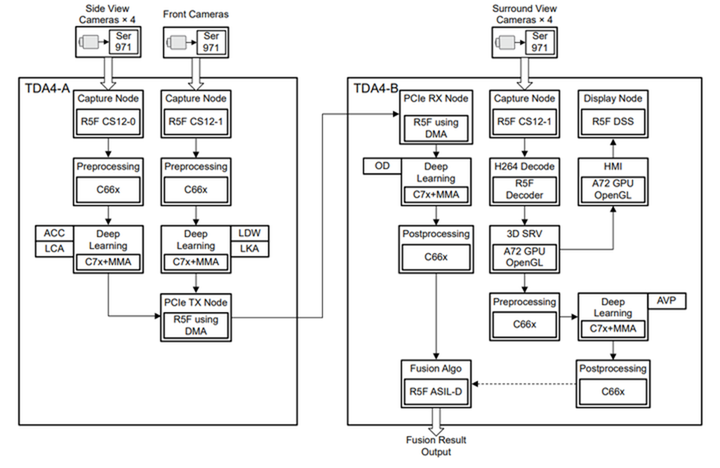
图28. TI官方提供的双TDA4实现行泊一体摄像头系统处理框图(之一)
ii) 双J3+MCU方案
目前已知的量产使用双J3+MCU方案的只有宏景智驾为2021款理想One提供的域控。地平线官方是没有提供双J3的参考设计的,但是可以在三J3方案上裁剪。而且这套域控也不支持11V5R。有传言说21款理想One变道辅助根本不是靠摄像头实现的,具体设计不是很不清楚。
iii) 三J3+MCU方案
地平线官方提供三J3+MCU(TC397,或者升级为异构SoC NXP S32G)的参考设计,并且通过几家IDH(授权硬件合作伙伴,即映驰、金脉、天准)提供域控制器整机。

图29. 地平线三J3参考设计框图,来自官网
上图是官网的参考设计。在是忍不住吐槽这个图画的是真烂。大家画图时候一定要注意遵循一个原则:一类图形只能表示一类实体。图中既然已经用矩形方框来表示芯片实体(“MCU”、“J3#1”),就不能再用同样的矩形方框来表示功能实体(“控制”、“感知balabala”)了,不然只会让人看得很迷惑,要反应几秒钟才能理解是什么意思。
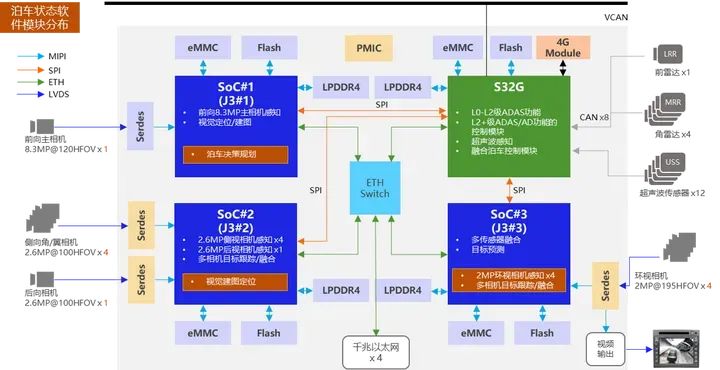
图30. 三J3+S32G行泊一体方案DCU3.0框图,来自映驰科技官网
上图是映驰科技三J3+S32G的方案。可以看出:一颗J3负责8M主相机处理、一颗J3负责周视和后视处理,第三课J3负责环视处理,最后由S32G中的M7核负责规控(S32G中有三对M7锁步核[26])。
不过三J3方案似乎还没有量产车型采用?如果有谁知道可以留言告诉我。
iv) 双J3+TDA4方案
把地平线官方三J3方案中的一颗J3替换成TDA4,就形成了双J3+TDA4方案。然后还可根据实际情况决定是不是再需要一颗MCU。禾多科技HoloArk1.0似乎就采用了这样的架构,这是我上海车展上拍的图,疑似双J3+TDA4+TC397。事实上这篇文章[27]也支持这样的架构。GNSS定位使用了uBlox F9K。
图31. 禾多科技HoloArk1.0裸板,上海车展实拍
不过这块板子。。。好歹这是上海车展啊喂,非得摆一块有好几条飞线的板子来展示。。。。
v) Nvidia Xavier + MCU
Xavier毕竟是Nvidia上一代主力辅助驾驶芯片,在全球出货量是相当大的。国内而言,德赛西威IPU03控制器即使用此方案,在小鹏P7等车型上量产。
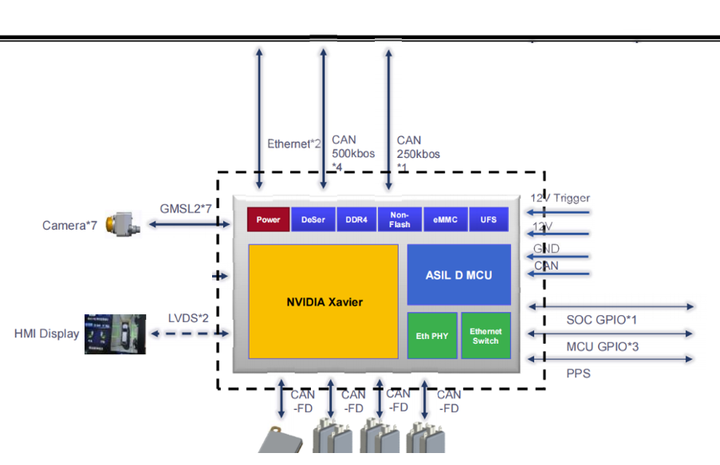
图32. 德赛西威IPU3.0,来源网络
vi) 单J5 + TDA4或S32G等等一堆
单J5方案是目前业界比较火的行泊一体域控方案,同时也有地平线官方参考设计支持。一般使用J5+S32G。也可根据企业实际情况搭配TDA4、TC397甚至是芯驰E3。比如上海车展上禾多的同学就跟我说,泊车算法做在TDA4里可复用的资源比较多,于是就在J5基础上搭一颗TDA4。
使用单J5方案的厂商和产品实在是太多了,禾多HoloArk2.0、大陆ADC615、纵目科技Ampheman 8000、映驰、东软睿驰、Minieye....数不过来。
J5域控的系统框图我实在是没在网上找到有开源的,所以也就不画了。

图33. 映驰开放式计算群,来源网络
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。