基于恩智浦MPC5744P的SAE J1939协议栈开发
来源: 电子工程世界
新闻行业新闻
摘要
本篇笔记主要记录基于恩智浦MPC5744P的SAE J1939协议栈开发,接口设计,以之前总结的CAN驱动设计为基础。
准备工作
准备一个CAN驱动可以正常工作的工程。
熟悉J1939协议文档和标准,特别是J1939-21和J1939-81。
CAN
恩智浦的MPC5744P控制器局域网络CAN,跟我们之前使用的恩智浦Kinetis KV, 等系列的flexCAN结构基本是一样的,MPC5744P 支持CAN2.0B。CAN 的高层协议,J1939 是基于CAN2.0B的扩展帧,29位标识符,支持单帧和多帧收发通信。本次设计主要实现SAE J1939 数据链路层和网络管理层。
J1939和CAN接口
接口函数
基于上次做好的CAN驱动提供一个发送函数,一个接收处理函数,作为与J1939协议栈的接口,来完成J1939所有功能的实现和应用。
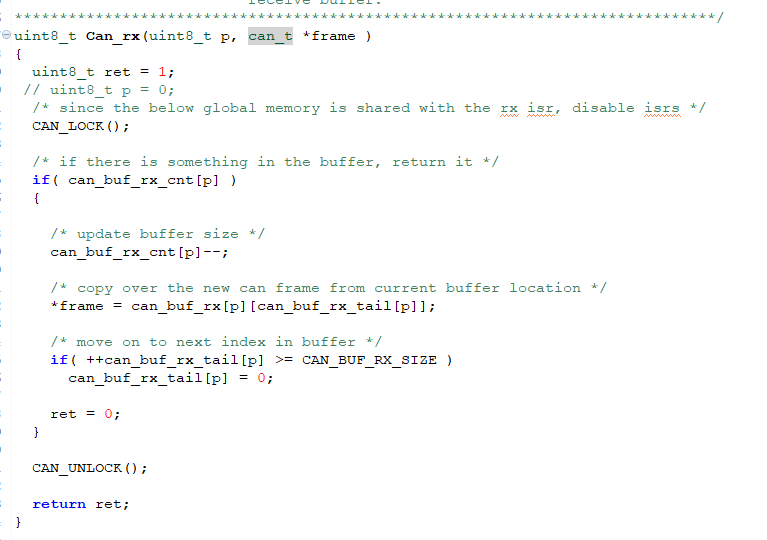
接收接口用于获取总线上的CAN报文帧,然后交由J1939的处理函数解析。这里发送函数未列出。
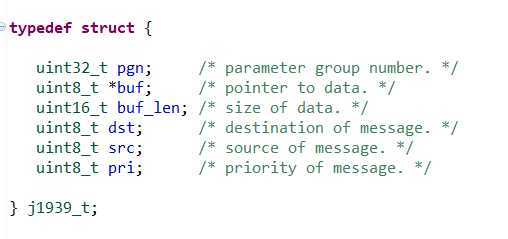
数据类型
根据J1939的标准和要求特定义以下数据类型,方便程序的开发和应用
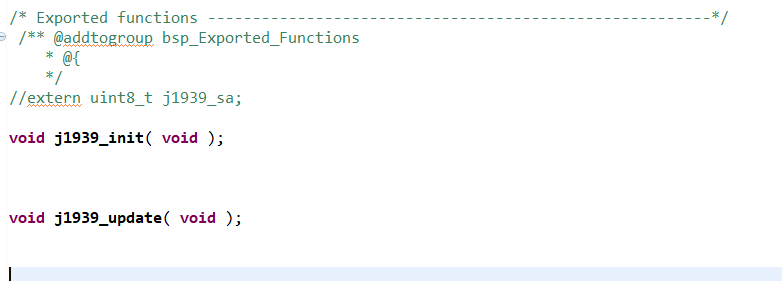
J1939对外接口
J1939对外接口除过初始化,就一个函数,所有功能在这个函数里实现,因为J1939协议栈内部有很多时基,设计的是基于10ms,所以这个函数放在10ms里调用。

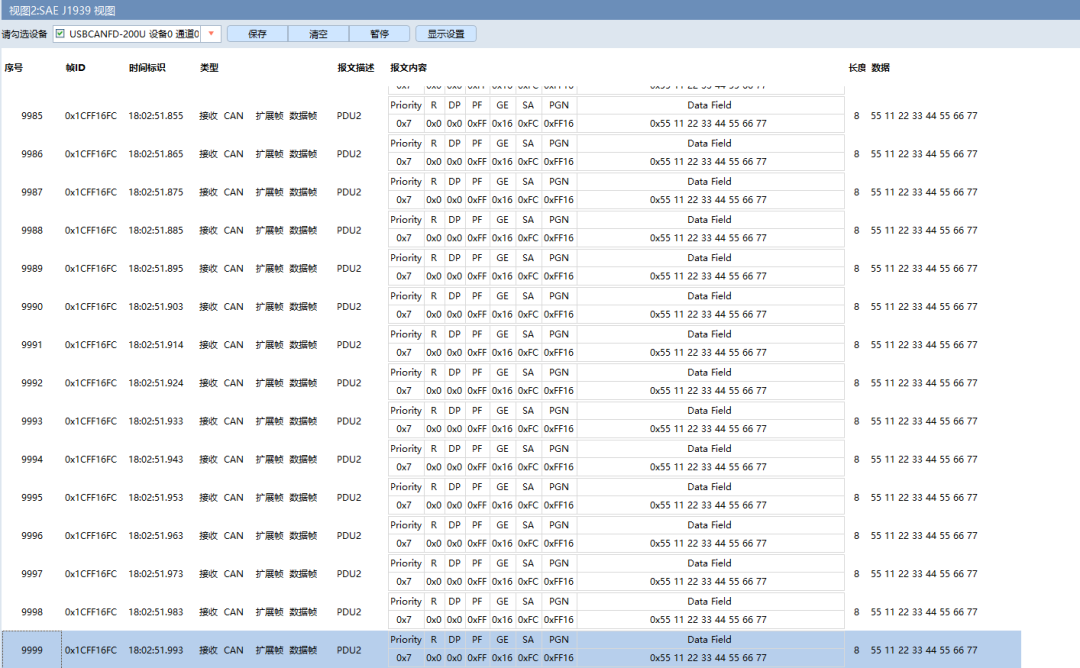
测试
SAE J1939协议是CAN的高层协议,是一种广泛应用于重型车,特种车,农机,以及非路面设备车辆等。
SAE J1939 协议栈 主要参考标准J1939-21 数据链路层, J1939-81 网络管理层 。标准的详细内容请参考SAE 的J1939标准。
文章来源于: 电子工程世界原文链接
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。