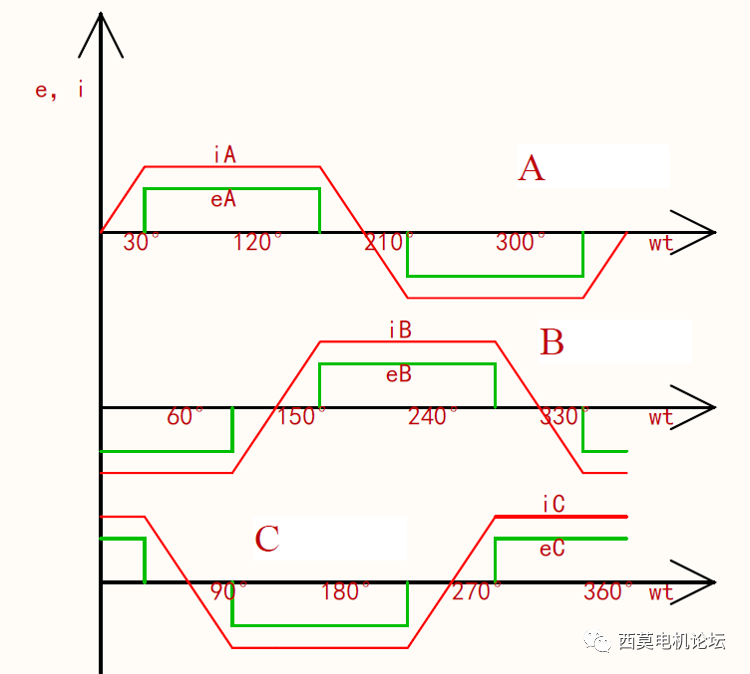
永磁无刷直流电机将永磁体粘接在转子铁心表面,采用集中绕组的方式,组成了隐极式转子结构,转子永磁体所产生的主磁场分布接近于梯形波,当转子以恒定的转速旋转时,由主磁场切割定子绕组,在每相定子绕组中所感应电势的波形和主磁场基本保持一致,为简化分析,可以近似视其为梯形波,其平顶宽度为120°电角度,如下图所示,为了输出恒定的电磁功率或转矩,三相定子绕组必须加入六步的梯形波或方波电流:
通常情况下,永磁无刷直流电机都有三个固定在定子上的位置传感器(一般为hall)检测转子相对定子的磁极位置,如图所示反映出通过hall信号检测到的位置信号,图中hall为120°安装方式:
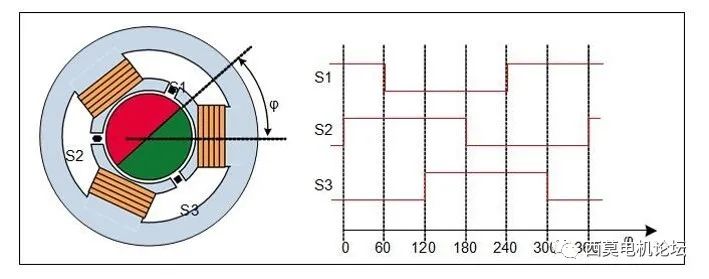
电机运行的时候,三个hall信号通过一些处理之后给到MCU,MCU再根据得到的hall位置信息,按照一定的顺序驱动三相全桥逆变器中开关器件的通断,这样就可以获得六步梯形波的定子电流,使定子绕组产生旋变磁场,定子磁场的平均旋转速度与转子永磁体的转速同步,这样就会有有效的电磁转矩产生,转子连续旋转。从原理上也可以看出,无刷直流电机的运行换相时刻与转子位置息息相关。可以看出如何控制好hall信号与MCU的位置信息传递来驱动逆变器中开关器件的通断是带hall永磁无刷直流电机控制的关键。
但由于位置传感器的安装会增加额外的成本和体积,而且会受到环境温度湿度等影响,所以无位置传感器(SensorLess)的控制方式越来越被大家重视。对于无位置传感器的永磁无刷直流电机控制,大家目前使用的普遍是反电势检测法。但是反电势法有一个很致命的缺陷,就是在电机启动状态和反电势很小的低速状态无法准确得到,也就无法准确得到转子的相对位置,所以无位置传感器永磁无刷直流电机的启动一直都是难点。
目前应用最多的永磁无刷直流电机无位置传感器控制方式是传统的三段式:首先给逆变器一个固定的驱动状态,把定子绕组拉到一个固定的位置,然后利用强制换相的方式进行开环加速运行,当加速到反电势可以准确得到的时刻再切换到利用反电势估算位置的闭环运行阶段。三段式适用于转动惯量小、轻载的运行场合,在重载场合并不适用,长期的开环会导致电机失步,定子电流变大,电机无法正确有效的运行(如:吸尘器、汽车、风机等)。
那么如何才能更好的实现无位置传感器永磁无刷直流电机的控制呢?