车辆转向系统技术前沿与展望
来源: 电控知识搬运工
微信公众号资讯
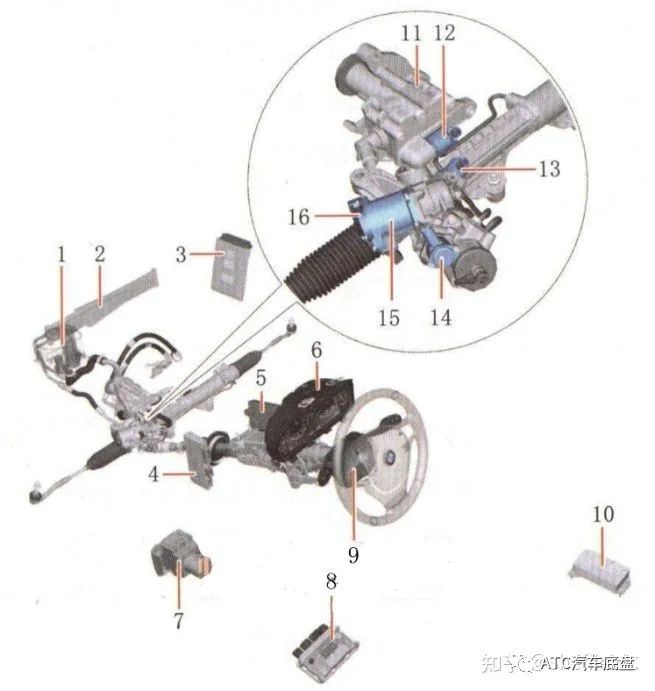
图1 机械式转向系统结构组成
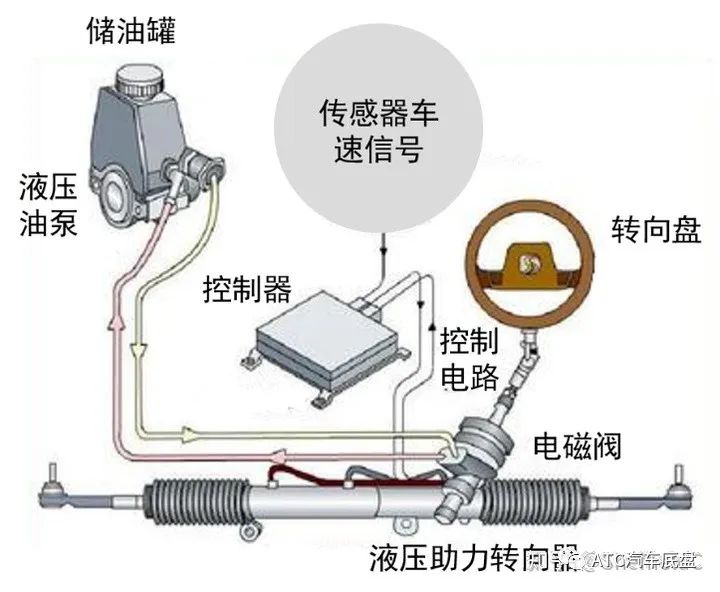
图2 电控液压助力转向系统结构
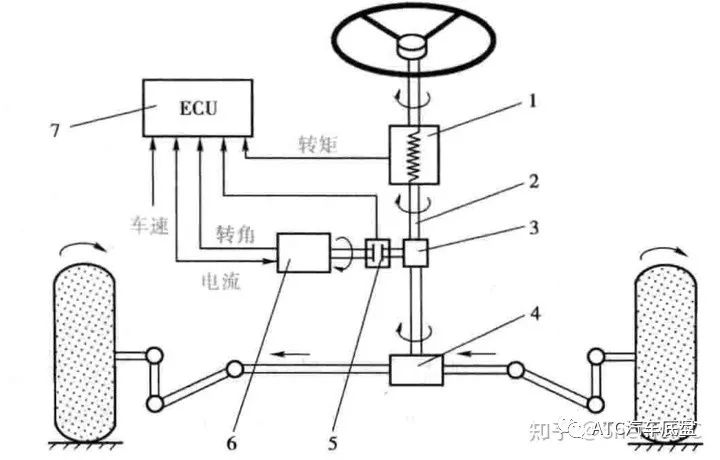
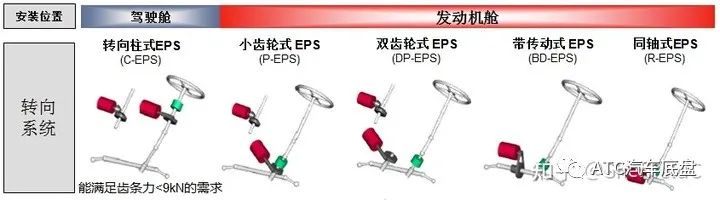
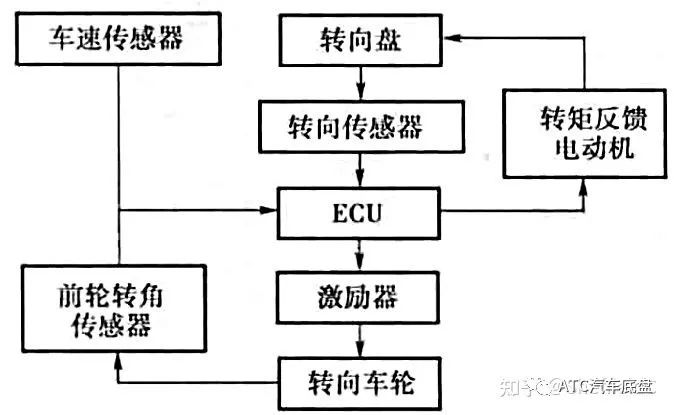
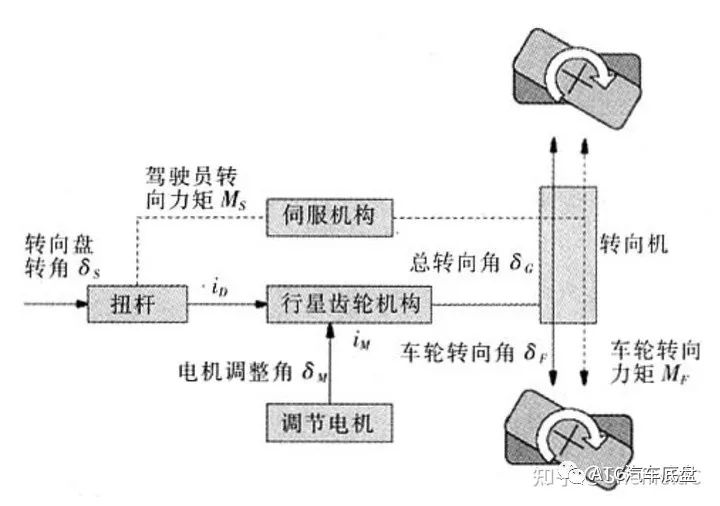
图4 直接式电动助力转向系统原理图
文章来源于: 电控知识搬运工原文链接
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。